作者丨吴思梦

ICRA 2026: VLA 大爆发,中国力量“全栈压制”


人形机器人的“超级星期一”: 硅谷定方向,中国定标准
数据驱动下,
灵巧操作的产业化路线


现场 Keynote 前瞻:
国内学者精彩开讲
王贺升 教授(上海交通大学):学习导航,从场景理解到决策
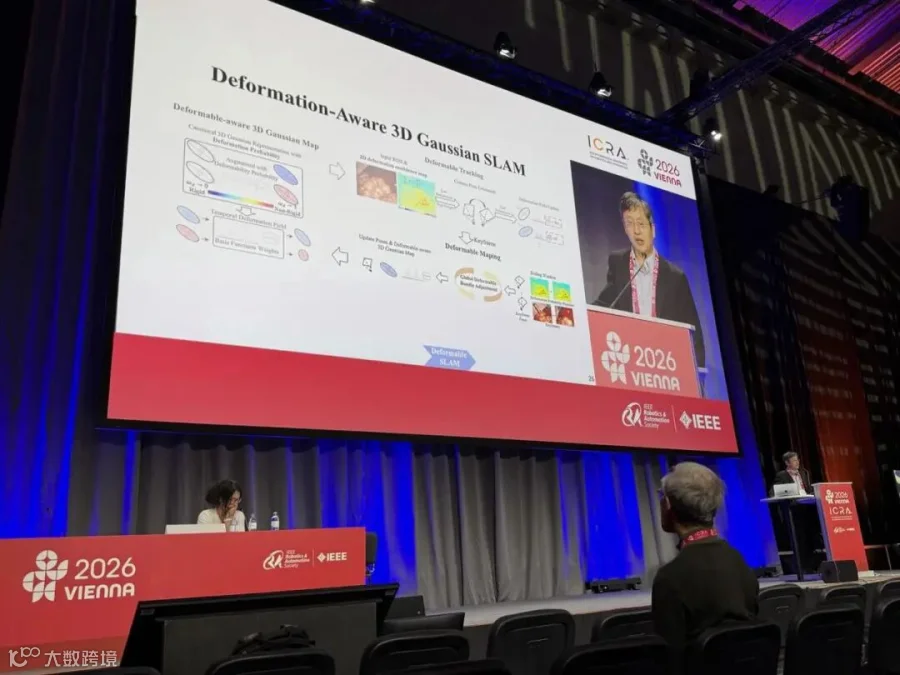

徐天添 研究员(中国科学院深圳先进技术研究院):用于精密医疗的磁控微纳机器人

锁定雷峰网专区,独家抢先透视
去哪看 ICRA【演讲/论文】详解?