

在自动驾驶里面,我们实现自动驾驶,主要是这么两种途径:一个是基于车载自身传感器的“自主行走控制系统”;还有一个基于V2X获取前方信息的“协调型行走系统”,也就是所谓的汽车网联。再往上一层就是智能加上网联,当智能和网联这两个系统联合在一起,可能就是将来的自动驾驶系统。
V2X可以作为自动驾驶技术的一项感知能力而存在,之所以从已经量产的车型上看并没有达到这个效果,就在于V2X与驾驶辅助不同,需要量变引起质变。当前具备V2X通讯能力的车型还是太少了,安装在道路上的通讯基础设施也太少了,如果要以V2X作为眼睛和耳朵,那么能看到的、能听到的太少了,信息量少,自然不足以作为判断的基础。
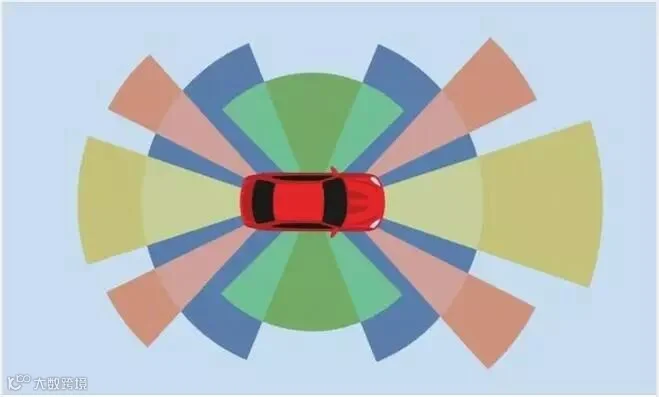
自动驾驶里面,智能的这部分更多是车载传感器的集合、传感器的融合以及应用。在传感器里面,车载传感器主要是分五种:电子雷达、激光雷达、相机、红外线相机、超声波传感器。其中,超声波由于探测距离太近,虽然现在搭载率很高,但是将来可能会更多的被取代。
而激光雷达(LiDAR)是无人驾驶汽车中最强大的传感器之一。它可以区分真实移动中的行人和人物海报、在三维立体的空间中建模、检测静态物体、精确测距。它是通过发射激光束来探测目标位置、速度等特征量的雷达系统,具有测量精度高、方向性好等优点, 在军事领域以及民用的地理测绘等领域都有广泛的应用。 由于激光雷达可以形成精度高达厘米级的3D环境地图, 因此在ADAS及无人驾驶系统中具有重要作用。
关于自动驾驶的传感器方案,厂商和科技公司对融合路线都有了基本认同,不过,也没有人能保证,摄像头、毫米波雷达、激光雷达的组合,就足以让车辆安全顺畅地行驶。眼下,以色列初创公司AdaSky,提出了在车上安装红外摄像头的方案,通过检测道路行人温度,帮助车辆更准确地识别行人。
实现自动驾驶的第一目的是提高安全性。在美国,90%的车辆事故是驾驶员失误引起的,自动驾驶汽车取代人类驾驶员之后,每年可以拯救将近35000条生命。
所以,汽车厂商们也相信,如果自动驾驶可以证明自己确实比人类驾驶安全,人们会更倾向于使用前者。
当然,要实现这一目标,车辆就必须全面而准确地感知和理解周围的世界,这甚至需要超于人类的感知能力。
目前测试的自动驾驶汽车中,几乎都采用了摄像头、雷达、激光雷达的传感器融合方案。现在,以色列初创公司AdaSky,还想在这个组合中加入一个新工具:检测温度的红外摄像头,来帮助车辆识别几百英尺外的行人。
一辆完全自动驾驶汽车需要在各种光线和天气状况下识别事物。AdaSky CEO Avi Katz表示,“现存的传感器和摄像头还不能完全满足这些需求。”AdaSky将向厂商提供远距离红外摄像头与计算机视觉系统,前者被他们称之为Viper。
眼下的传感器虽然可以提供360度的视觉感知,但每一个都有自己的短板。晚上或者白天日光强烈的情况下,摄像头的作用会被削弱很多;由于大气层的反射,激光雷达会受到雨、雾、尘土的影响;雷达则可能分不清高反射性的小型金属物体,比如路上的易拉罐。
尽管集合了三种传感器数据,对一辆自动驾驶汽车来说,要辨别广告牌和其它车辆上的图像,也有一定难度。这正是AdaSky想弥补的地方,它的思路是,如果车辆检测出一个人形物体释放出的温度,那么它就可以判断出,自己正在靠近的更可能是一个真人,还是图像。
“如果车辆检测出某个物体散发出的温度,就可以弄清它究竟是人还是动物,如果是前者,系统就会告诉你,有可能出现预想不到的情况。”在南加州大学学习自动驾驶的Jeff Miller说道。比如,汽车认识到前方是一只鹿后,就会更小心地行驶,而不是只关注道路两边的物体。
车俩感知不只是关于看到的事物,而是整个外部世界。最近,Waymo就表示,他们将升级后的麦克风用在了警报器上,时刻关注驾驶员状况。Cadillac也在方向盘上装了一个红外摄像头,由此车辆可以在半自动驾驶情况下,监控驾驶员的状态。
随着新技术的不断运用,以及厂商和科技公司在成本、稳定性和可行性等因素上的考虑,人们可能永远都不会有传感器的最终解决方案。但可以确定的一点是,自动驾驶系统只有看得更准,才能驾驶得更好。

![]() 戳下面的原文阅读,更有料!
戳下面的原文阅读,更有料!