

- 深圳市正运动技术有限公司 -


2022
机器视觉运动控制一体机在流水线视觉随动同步点胶方案
VPLC516E系列
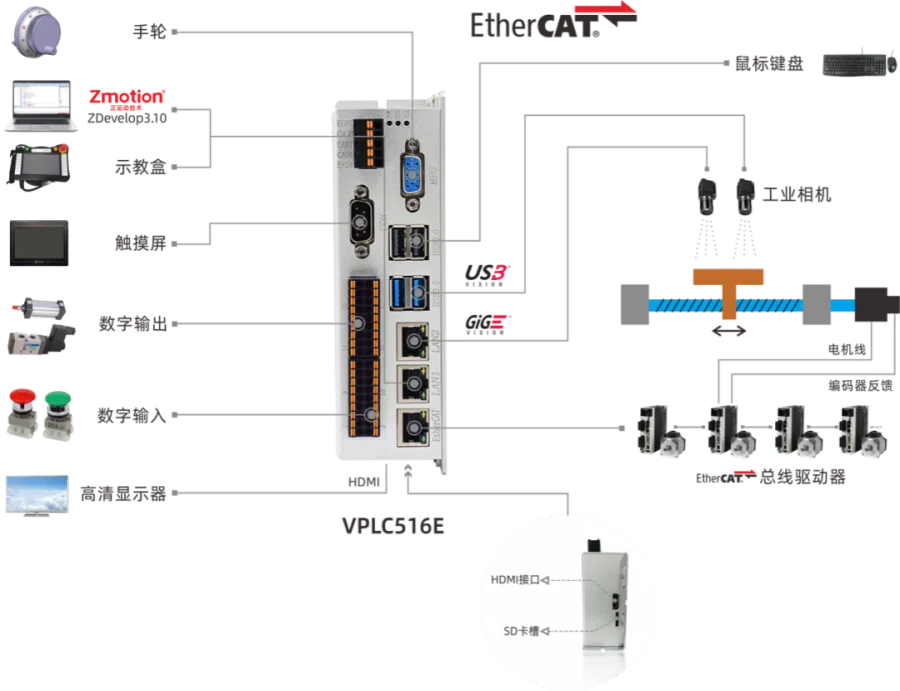
VPLC516E系列是正运动技术推出的国内首款机器视觉+运动控制一体机,集成了机器视觉和复杂的运动控制等功能,全方位替换“PC+Windows+机器视觉+运动控制卡”的传统方案。另外,ZDevelop 低门槛的IDE开发环境,完善的开发工艺包,满足了现代工业应用中集成化、模块化、智能化的需求。本文通过VPLC516E视觉运动一体机在流水线视觉随动同步点胶方案,来更深入了解此产品的功能及其应用。
01
01
VPLC516E的机器视觉功能
支持视觉定位
支持视觉测量
支持检测识别
-
支持Blob分析
02
VPLC516E的运动控制功能
支持16轴EtherCAT总线运动控制,EtherCAT刷新周期 1ms
支持电子凸轮、直线插补、圆弧插补、连续轨迹加工等复杂的运动控制
可支持Delta、SCARA、协作机器人、双旋转等30+ 机械手模型算法
支持视觉飞拍功能
支持精准输出,实现位置同步输出PSO
-
支持手轮高速编码器输入接口
02
点胶,是将产品工艺中的胶水或者其他液体精准地点滴、灌注、涂抹、喷射到精准位置的过程。一般的点胶机使用固定点胶机台,产品位置需要放置准确对位,生产时需要人工或者其它取、放料机构进行取放料。
在制造加工行业,生产力是企业生存发展的第一要素,其中产能效率又是企业生产力的重要组成部分。从五金零件封装、PCB电路板、3C电子加工,到汽车电子、新能源锂电等行业,点胶的应用非常广泛,从传统的人工点胶、半自动点胶,再到后来的离线式点胶,在线式点胶,点胶的精度和效率也是越来越高。在线式点胶之皮带随动同步点胶具有效率快,精度高,性价比好等特点,应用于很多行业。
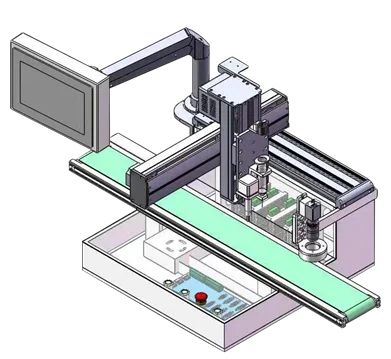
VPLC516E在线式点胶之皮带随动同步点胶有X、Y、Z三轴和SCARA机械手的两种运动结构方案,配合流水线,实现流水线动态跟踪点胶,可提高产品的加工生产效率,也特别适用于3C电子组装、涂胶 、锁螺丝、焊锡、插件、上下料等其他应用场合。
流水线动态跟踪点胶主要由机器视觉系统、XYZ三轴结构(或者SCARA四轴机械手)、传送带、运动控制系统构成。当传送带上的工件通过工业相镜覆盖视野范围时,相机自动拍照采集图像,通过VPLC516E视觉运动一体机对图像分析处理,获取此工件的姿态、轮廓、位置数据(或者通过视觉软件的轨迹编辑、CAD导图的方式亦可)等,并发送给运动控制处理单元。结合视觉发送过来的数据以及传送带编码器反馈的位置数据,来调整规划运行X、Y、Z轴的点胶轨迹(SCARA机械手点胶包含点胶轨迹和姿态),对传送带上的工件动态跟踪和高精度的随动同步点胶。
XYZ视觉随动同步点胶示意图
正运动技术的VPLC516E视控一体机,既可以通过GigE接相机,做视觉飞行抓拍,加工工件的轮廓提取、视觉定位处理等,又可以通过底层的30+种机械手的算法控制SCARA机械手高速高柔性的运行,图形编辑、CAD导图功能,实现运动控制+机械手控制+机器视觉的高集成、高智能的一整套解决方案。
03
01
系统电气拓扑图
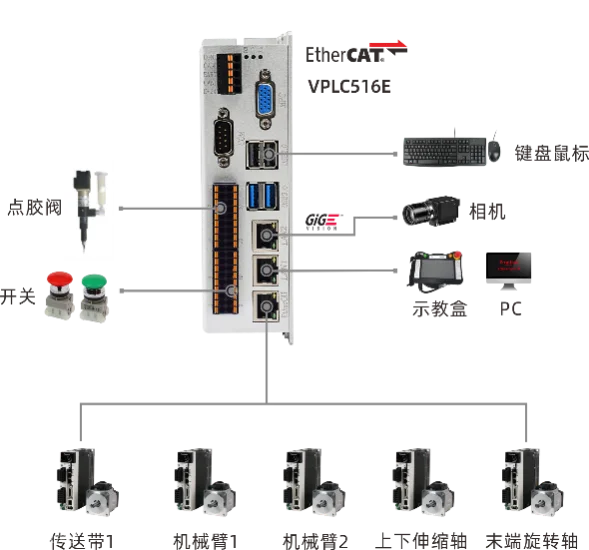
SCARA随动同步点胶电气拓扑
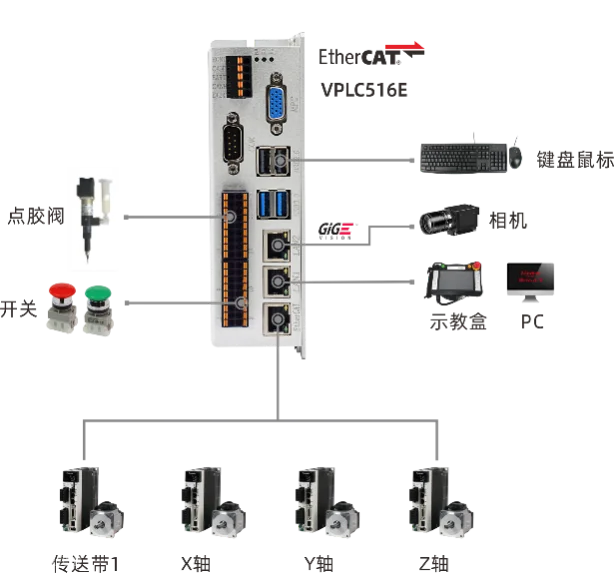
XYZ轴随动同步点胶电气拓扑
VPLC516E视觉运动控制一体机的视觉随动同步点胶硬件配置如下:
|
硬件明细表 |
|||
|
产品类型 |
产品型号 |
厂家 |
数量 |
|
视觉运动控制一体机 |
VPLC516E |
正运动 |
1 |
|
示教盒 |
ZHD400X |
正运动 |
1 |
|
相机 |
130W/500W像素 |
— |
1 |
|
光源 |
环形/条形光源 |
— |
1 |
|
显示屏+鼠标键盘 |
— |
— |
1 |
|
EtherCAT总线伺服 |
400W+100W |
松下 |
5/4 |
|
4轴SCARA机械手结构 |
— |
— |
1 |
|
XYZ结构 |
— |
— |
1 |
|
点胶阀 |
— |
— |
1 |
|
传送带 |
— |
— |
1 |
|
其他配件 |
— |
— |
— |
02
系统动作流程
1)上料
将待加工或点胶的物料产品上到流水线皮带上。
2)视觉拍照
可以选择硬件触发拍照,定时输出一个DI信号,一路触发相机拍照,另一路接至控制器锁存输入点,记录有效产品拍照时流水线的编码器当前位置。
3)模板匹配,筛选,排序
对获取到的图像进行模版匹配、视觉定位,并进行重复筛选,根据有效产品图像信息,对同一时间段并行产品进行最优加工排序。
4)工件位置纠偏、轮廓的提取
对筛选获取到的图片进行位置纠偏、轮廓分割并提取,生成最优加工轨迹,。
5)SCARA机械手加工
机械手返回待机位,当有产品触发时,机械手加速跟随至与流水线同步后,再下降并打开点胶阀,对工件产品进行轨迹点胶。动态跟踪点胶完成后,取消跟随流水线,关闭点胶阀。
6)返回待机位
加工完成后,机械手返回待机位,这里如果检测到要跟随下一个产品加工,改变返回路线,直接跟随下个产品。
04
01
视觉功能相关Basic指令
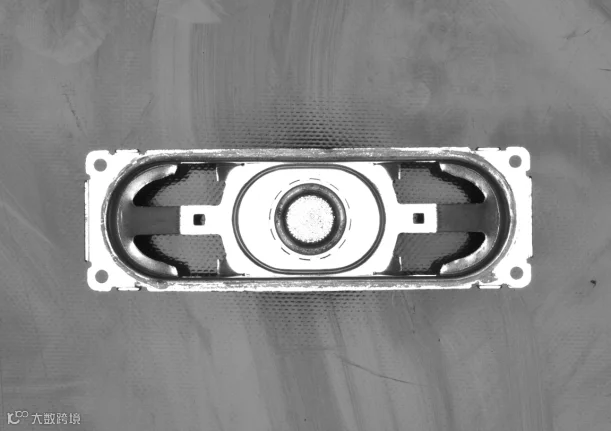
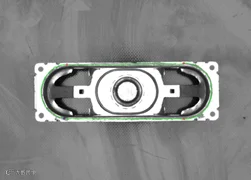
图像抓取、模板匹配、轮廓提取(轮廓转换成运动轨迹)等,在某些特殊的场合,也可以采用轨迹编辑、CAD导图的方式,进行轨迹的生成;
|
相关指令 |
功能描述 |
指令使用 |
|
ZV_ IMGGETSUB |
获取图 像子区域 |
ZV_IMGGETSUB (img,sub,x,y,w,h) |
|
ZV_ SHAPECREATE |
创建形状匹配 模板 |
ZV_SHAPECREATE (img,model,angle_start, angle_end,scale_min,s cale_max,thresh) |
|
ZV_ SHAPEFIND |
使用模板在图像img上进行匹配查找 |
ZV_SHAPEFIND(model, img,matchs,min_ Score,nums,mid_dist,min _thresh ,accuracy ,speed,polar) |
|
ZV_ CONTGENSUBPIX |
亚像素边缘轮廓提取(图像转轨迹) |
ZV_CONTGENSUBPIX (img,region,list,low, high,min_Len) |
视觉提取外轮廓图形如下图所示:
02
运动控制功能Basic相关指令
1)运动应用指令:
提前/延时开关胶、视觉飞拍、皮带跟踪、硬件比较输出等;
皮带上的物料定位完成后的跟踪点胶,可以使用专门的皮带跟踪加工指令MOVESYNC;
硬件精准位置输出MOVE_OP触发拍照,实现飞拍功能,误差1个脉冲;
小线段速度前瞻规划CORNER_MODE,使运动更平滑、点胶更均匀;
|
相关指令 |
功能描述 |
指令使用 |
|
MOVE_OP |
硬件精准位置输出 |
MOVE_OP ([ionum],value) |
|
MOVEOP_ DELAY |
延时/提前开关胶阀 |
MOVEOP_DELAY =time(可精确到us) |
|
MOVESYNC |
同步运动,皮带上物体跟随 |
MOVESYNC(mode, synctime,syncposition, syncaxis,pos1[,pos2, pos3…]) |
|
HW_PSWITCH |
硬件位置比较输出 |
HW_PSWITCH(mode, direction, reserve, tablestart, tableend) |
|
CORNER _MODE |
拐角减速等速度前瞻 |
CORNER_MODE = mode |
2)SCARA机械手正逆解模式
正解模式
BASE(Viraxis_x, Viraxis_y, [Viraxis_v] [,Viraxis_z])
CONNREFRAME(1,tablenum,Axis_a,Axis_b[,Axis_c][,Axis_d])
WAIT LOADED
建立成功后,虚拟轴 MTYPE 将显示为 34,IDLE 显示为 0。此时只能操作关节轴在关节坐标系中运动,虚拟轴会自动计算末端工作点位于直角坐标系中的位置。
逆解模式
BASE(Axis_a,Axis_b[,Axis_c][,Axis_d])
CONNFRAME(1,tablenum, Viraxis_x, Viraxis_y, [Viraxis_v] [,Viraxis_z])
WAIT LOADED
建立成功后,关节轴 MTYPE 将显示为 33,IDLE 显示为 0。此时只能操作虚拟轴在直角坐标系中运动,关节轴会自动计算在关节坐标系中如何联合运动。
03
简单易用的机器视觉+运动控制 ZDevelop V3.10编程
同一套开发软件即可完成运动控制+机器视觉+HMI的编程,运动和视觉均可采用Basic的编程方式,也可以用梯形图来编写程序,界面可以用同一套软件下的HMI功能来实现,直观简单,操作方便。
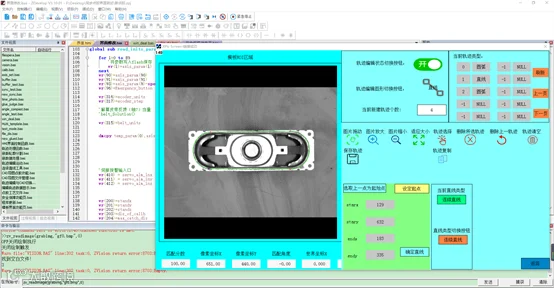
ZDevelop V3.10 HMI实时监控
05
正运动技术VPLC516E视觉运动控制一体机在线式视觉随动同步点胶应用方案的优势:
将视觉与运动控制结合,客户不需要另外配置工控机,节约了成本,减小了安装空间。
相机直接与控制器相连,简化了图片数据传递流程,提高了数据传输速度。
使用简易的指令实现复杂的视觉处理,降低了工程师对视觉开发的难度。
一套IDE集成环境,即可解决运动控制+机器视觉+HMI显示,缩短了开发周期。
30+机械手模型的控制,无需专有的机器人控制器,节省了硬件成本。
具备提前开关胶、拐角减速、硬件位置比较输出等点胶工艺功能。
-
支持CAD导图和轨迹轮廓编辑功能,可应对一些特殊场合的异形加工轨迹。
06
3C电子零部件点胶
半导体点胶
全自动点胶机
电声行业零部件点胶
集成电路点胶
机壳粘接点胶
光学镜头点胶
-
机械部件密封点胶

公司简介


正运动技术专注于运动控制技术研究和通用运动控制软硬件产品的研发,是国内工控领域发展最快的企业之一,也是国内少有完整掌握运动控制核心技术和实时工控软件平台技术的企业。

NEPCON ASIA 2022 亚洲电子生产设备暨微电子工业展览会即将于2022年10月12-14日在深圳国际会展中心(宝安新馆)举办!期待您的到来!
★
扫描二维码预登记
★

• 参观热线•
李海宾 女士 励展博览集团
电话:400 650 5611
邮箱:haibin.li@rxglobal.com
点击【阅读原文】,进行NEPCON ASIA 2022参观预登记,了解更多新材料、新设备、新技术及新应用解决方案!