 库卡机器人KR C5 basiccab控制柜接线与通电操作指南,全面解析从接线到通电的完整流程。涵盖IO信号接线、外部急停回路、电源接入、安全接口定义及以太网通信配置等关键内容,助力快速掌握KR C5 basiccab系统操作要点。
库卡机器人KR C5 basiccab控制柜接线与通电操作指南,全面解析从接线到通电的完整流程。涵盖IO信号接线、外部急停回路、电源接入、安全接口定义及以太网通信配置等关键内容,助力快速掌握KR C5 basiccab系统操作要点。
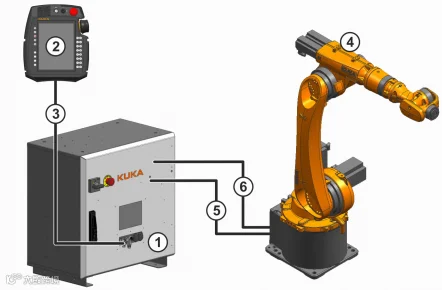
一、库卡机器人KR C5的组件构成
- KR C5 basiccab 控制柜
- KUKA smartPAD-2 手持编程器
- smartPAD连接电缆
- 机械臂本体
- 电机动力电缆
- 数据传输电缆(RDC)
二、KR C5控制柜整体接口定义
1. 外部结构组成
- 控制柜门主开关
- 紧急停止装置(选配)
- 控制系统KR C5或附加轴驱动箱
- UPS蓄电池(选配)
- 前门锁止装置
- 视窗
- 前门接口(依配置而定)
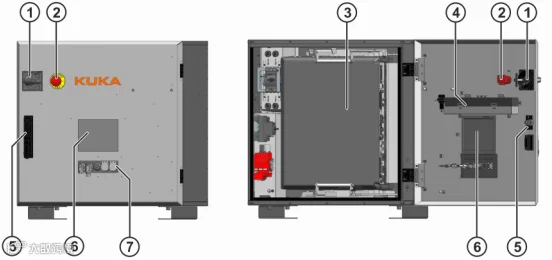
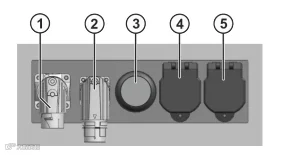
2. 后部电源与扩展接口
- 制动电阻接口 XD3
- UPS接口 XD2
- 主电源接口 XD1
- UPS接口 XD24
- 主电源输入接口 XD00

3. 前面板接口模块
- smartPAD接口 (XG19)
- XFKSI接口
- SF1 Softpower按钮接口
- XFUSB1/XFUSB2 USB 3.0接口
- XG58接口
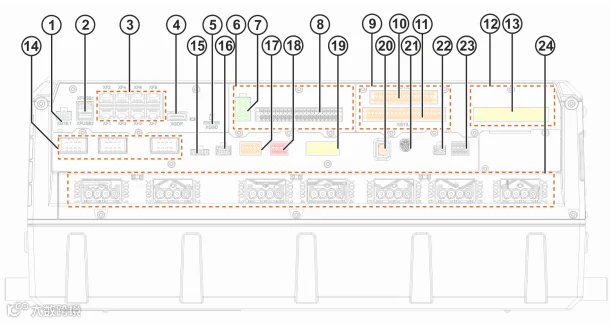
4. 主要功能接口分布
- XG19.1:smartPAD连接接口
- XFUSB1/XFUSB2:USB 3.0 接口
- XF1-XF8:Ethernet/EtherCAT通信接口(依系统软件配置)
- XGDP:DisplayPort 1.2 显示输出
- XGSD:microSD卡插槽
- IFBstd:标准现场总线接口
- XD12/XD12.1:为XG12提供24V电源输入与输出
- XG12:16通道数字输入/输出接口
- IFBsafeext:外部安全总线接口
- XG13.1/XG13.2:分离式接口
- IFBsafe:内部安全总线接口
- XG11.3:保护装置连接接口
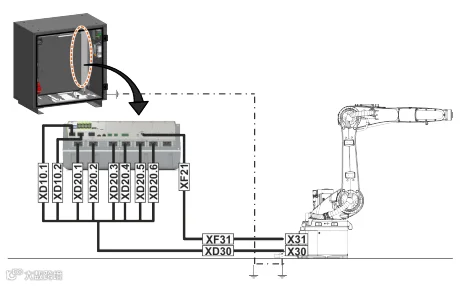
- 制动器接口:
- XD10.1:轴A1-A3制动器
- XD10.2:轴A4-A6制动器
- XD10.3:轴A7(附加轴)制动器
- XG1:预留接口
- XG11.2:外围接触器US2控制
- XG42:零点标定检查接口
- XG58:外部使能与紧急停止安全输入接口
- XG11.1:2个安全输入 + 1个安全输出
- XF21.1:附加轴驱动箱EtherCAT通信
- XF21:RDC数据通信接口
- XD55:现场总线耦合器27V电源输出
- XG33:4路快速测量输入 + 1路“驱动器就绪”信号输出
- 电机接口:
- XD20.1~XD20.6:对应轴A1-A6电机连接
- XD20.7:轴A7(附加轴)电机连接
三、机器人本体与控制柜连接线缆
- 电机电缆:用于传输动力至机械臂各轴电机
- 数据电缆(RDC):实现控制器与机械臂之间的编码器和反馈信号通信
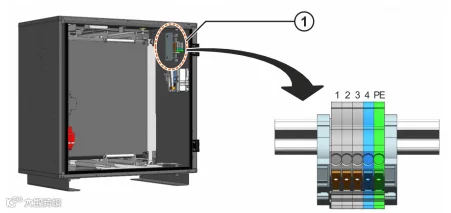
四、电源接线针脚定义与供电操作
1. 电源接口 XD00 针脚定义
- 1 — L1
- 2 — L2
- 3 — L3
- 4 — N(使用机器人控制器时无需连接)
- PE — 接地端子
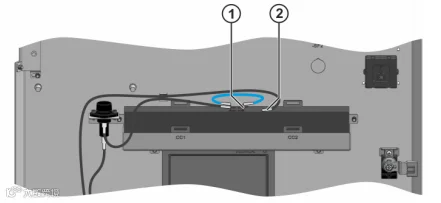
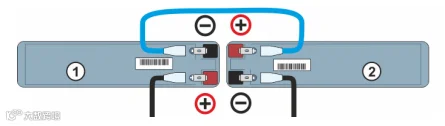
2. 蓄电池连接步骤
- 确认蓄电池极性正确
- 将连接电缆插入蓄电池接口
- 确保接触牢固,避免松动
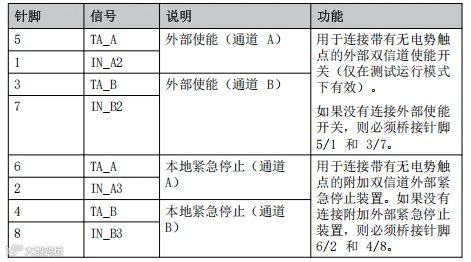
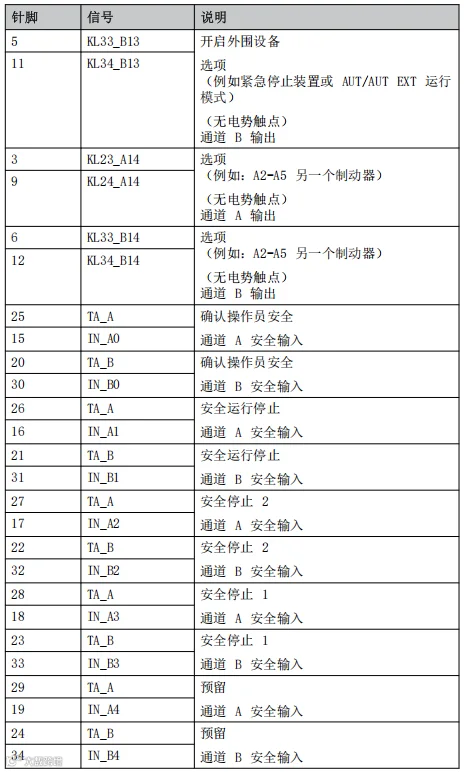
五、外部安全操作接口短接定义
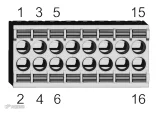
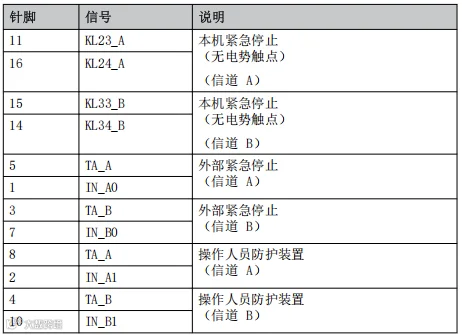
1. XG58 接口
支持连接外部使能开关及额外紧急停止按钮,作为安全输入通道。

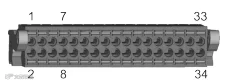
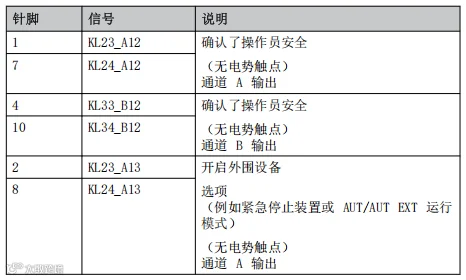
2. XG11.1 安全接口
提供2个安全输入和1个安全输出,必须通过该接口连接急停装置,或与上级PLC联动实现安全联锁。
3. XG11.3 接口
用于连接外部防护装置,如安全门、光栅等。
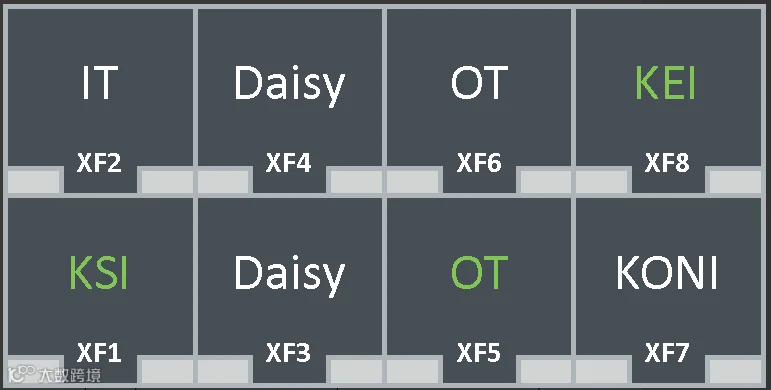
六、以太网通讯接口 XF1-XF8 配置说明
- XF1(KSI接口):专用于连接笔记本电脑,进行WorkVisual配置、诊断及系统更新
- XF5:可接入OT或IT网络,支持PROFINET(含PROFIsafe)、Ethernet/IP(含CIP Safety)等工业协议,用于PLC或I/O终端通信
- XF8(KEI接口):扩展外部EtherCAT从站设备,支持总线耦合器(如EtherCAT、Profibus、DeviceNet),实现与PLC的安全FSoE通信
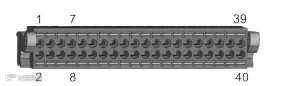
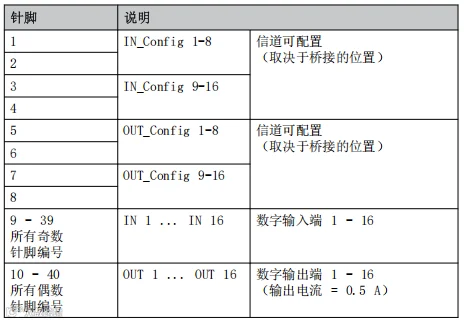
七、IO通讯板卡XG12接线定义与配置
1. XG12 接口功能概述
- 提供16路非安全型数字输入/输出
- 输入端兼容NPN/PNP传感器
- 输出端可驱动NPN/PNP执行器
- 支持分组切换高侧/低侧模式(每8路一组)
- 默认工作模式:高侧输出
- 供电来源:通过XD12接口提供24V电源
2. 模式切换桥接方式
- 针脚1→2:将输入1-8切换为低侧模式
- 针脚3→4:将输入9-16切换为低侧模式
- 针脚5→6:将输出1-8切换为低侧模式
- 针脚7→8:将输出9-16切换为低侧模式