

尽管模型、数据集与仿真器在代码层面已迭代多轮,但现实世界中可供研究的机器人硬件依然稀缺、昂贵且脆弱,制造门槛往往高达数十万美元。为打破这一僵局,5 月下旬,Hugging Face 正式推出开源项目 LeRobot Humanoid。
该项目展示了一台成本不足 3,000 美元的双足人形机器人,具备自主站立与行走能力。其“骨架”仅需约 3.5 公斤的 3D 打印塑料耗材,成本低至 56 美元;赋予其行动能力的 12 个关节电机,则全部源自中国硬件供应链。除了极致的成本控制,该项目更提供了一套涵盖机械设计、仿真、标定、策略训练至实机部署的全栈可复现“机器人学习闭环”。
定位:不追求“最先进”,只追求“可复现”
LeRobot Humanoid 由 Virgile Batto 发起,联合 Hugging Face 等多方贡献者打造。其核心目标并非打造性能顶尖的人形机器人,而是提供一台让研究者能够亲手搭建、理解、维修、改装并控制的平台。
官方博客指出,当前人形机器人研究面临硬件昂贵、封闭及难以复现的痛点。即便算法与数据开源,缺乏物理验证平台仍阻碍了多数研究者。为此,该项目构建了包含五大组件的全栈平台,打通了从设计、组装、仿真、数据采集、模型辨识到策略训练与部署的完整链路。
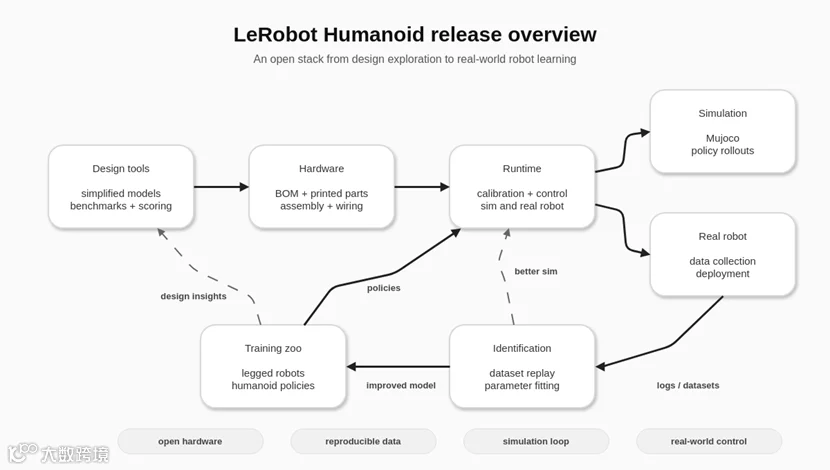
图 | 项目涵盖从硬件设计组装到仿真、识别、训练和实际控制的全流程
五大组件包括:
1. 硬件:提供物料清单(BOM)、3D 打印文件、装配文档及电机调试工具;
2. 设计工具:基于简化模型的控制导向设计流程与基准评测;
3. 运行时(Runtime):支持仿真与真机标定控制,内置安全检查并集成数据采集;
4. 参数辨识:通过真实数据回放拟合仿真参数,缩小“仿真 - 现实”差距;
5. 训练环境:基于 MJLab 训练和评估腿式机器人运动策略。
硬件拆解:中国供应链与 3D 打印的成本奇迹
根据公开的物料清单(BOM),这台 12 自由度的纯双足平台(暂无上半身)结构清晰:主控采用树莓派 5(Raspberry Pi 5),姿态感知使用 BNO055 或 BNO085 惯性测量单元(IMU),通信通过 CAN-FD 总线实现。整机需 3D 打印 75 个零件,消耗约 3.5~4 公斤 PLA+ 耗材。
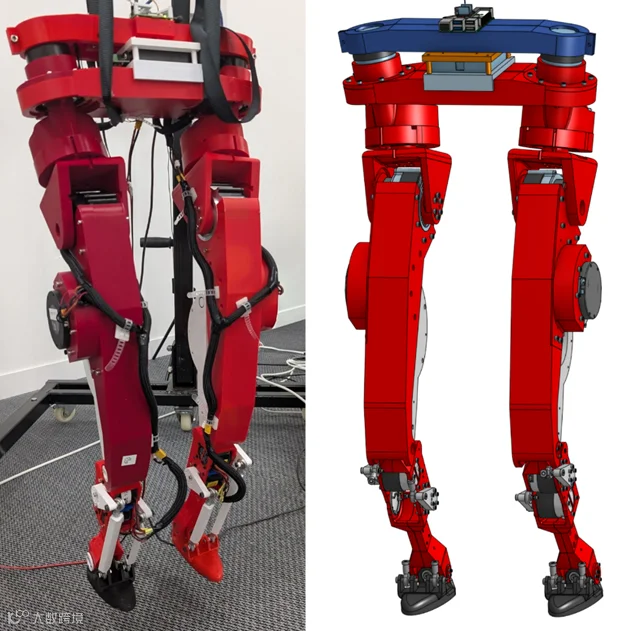
核心执行器方面,12 个电机全部来自中国厂商灵足时代(RobStride),具体分布为:躯干 O0 两只、髋部 O2 两只、大腿 O3 四只、小腿 O5 四只。
成本构成如下:树莓派 5 及适配器等主控电子件约 235 美元,3D 打印耗材约 56 美元,螺丝轴承等标准件约 465 美元。最昂贵的 12 只电机合计 1,880 美元。整机总成本精确计算为 2,636 美元。
这一成本结构揭示了下沉逻辑:3D 打印大幅降低了结构件成本,而中国供应链则将原本高昂的执行器价格压缩至可承受区间,两者共同构成了开源人形机器人的降本基石。
软件架构:低算力下的高频闭环控制
软件层面,Runtime 运行在树莓派 5 + Ubuntu 环境下,利用 Python 对 12 个电机进行高频闭环控制。传统双足平衡控制(如 WBC)通常需 500Hz-1000Hz 频率及强算力 x86 主机,但该项目采取了务实的折衷方案:
首先,通信协议极度简化,采用基于 CAN-FD 总线的 MIT 控制协议,仅传输扭矩、位置、速度等基础参数,载荷极小。其次,避开了复杂的传统控制算法,转而在 PC 端基于 MuJoCo 仿真环境训练轻量级端到端神经网络步态模型(如 PPO 强化学习算法),导出为 ONNX 或 PyTorch 格式后部署至树莓派。
针对 Python 垃圾回收(GC)可能导致的实时性问题,团队编写了严格的底层标定与安全机制,包括指令跳变防护、踝部保护与急停功能,确保在网络输出不稳定时不会损坏 3D 打印关节。
值得注意的是,虽然高性能中间件 dora-rs 开发者参与了项目,但首版官方 Runtime 并未默认集成该方案,而是坚持使用原生 Python(Vanilla Python)。此举旨在降低入门门槛,确保 AI 开发者能无障碍阅读代码;对于追求极致性能的用户,社区已通过 dora-lerobot 提供了加速替代方案。
Hugging Face 的生态野心:重塑机器人行业
LeRobot 项目始于 2024 年,由前特斯拉科学家 Rémi Cadène 在 Hugging Face 创立。从售价百元的 SO-100 机械臂,到如今数千元的双足机器人,Hugging Face 正构建一条“阶梯式”发展路线,旨在以极低门槛引导 AI 社区逐步进入机器人领域。
Hugging Face 试图复刻其在大型语言模型(LLM)领域的成功逻辑:利用廉价易造的硬件(3D 打印 + 中国电机)吸引全球开发者采集物理世界数据,回传至平台贡献给开源社区,从而在 Hugging Face Hub 上形成数据与模型的飞轮效应。
资本与合作伙伴的动作也印证了这一战略。2025 年 4 月,Hugging Face 收购法国机器人公司 Pollen Robotics,获得其人形平台 Reachy 2;同时与英伟达(NVIDIA)深度合作,后者已将人形机器人基础模型 GR00T 上架 Hugging Face Hub。Hugging Face 联合创始人 Thomas Wolf 明确表示,机器人是 AI 的下一个前沿,且应当是开放、可负担的。
展望:具身智能的商业壁垒何在?
LeRobot Humanoid 的出现向商业厂商提出了严峻问题:当物理骨架可由家用 3D 打印机制造,核心电机可低成本跨境采购,软硬件闭环全栈开源时,人形机器人的护城河还剩什么?
答案已然清晰。随着硬件与通信中间件的平民化,机器人的核心价值正发生根本转移。未来的竞争不再属于单纯组装精美躯壳的公司,唯有那些能低成本获取海量物理世界数据、并拥有高泛化性大脑模型(VLA)的生态构建者,方能在具身智能时代立足。
参考链接:
1. https://huggingface.co/blog/VirgileBatto/lerobot-humanoid
2. https://github.com/Virgileboat/lerobot-humanoid
3. https://1ms.ai/