
1
直接对齐
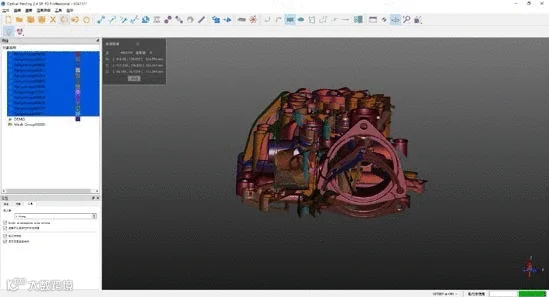
仅利用表面形状特征自动对齐每一个扫描; 此算法只有在表面具有良好的可区分的细节情况下才建议使用:否则,程序可能会失败,这就需要通过“手动对齐”算法校正,将直接对齐运用到一组扫描中将导致该算法尝试将集合中所有元素进行对齐(如图所示)
直接对齐
在某些情况下,特别是在数字化的对象需要多次扫描采集,或者如果它是由一组部件组成,有必要将一个项目中的扫描细分成组,把扫描集合想象成一个单一的组。在这种情况下,直接对齐可以在组之间应用,如图所示;
图显示了一组包含了一组对齐的扫描;在这样组内的扫描相对于彼此对齐,但不与第一组中的对齐。
2
标记点对齐
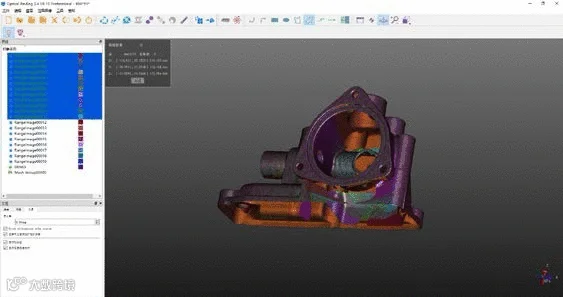
在数字化的对象不满足直接对齐要求的情况下,可以使用此功能。标记对齐需要用户在采集之前给对象上应用一组粘性标记:然后该软件将能够识别这样的标记,并利用它们来重建每个扫描的位置,如图所示:
标记点对齐
在启动这个算法之前,有必要指定识别的标记点的类型:
框架的边界标记点;
内边框边界标记点;
无边框边界标记点;
然后,选择需要对齐的扫描并按下按钮可以使得程序自动对齐所选择的扫描。在所述过程的最后,正确对齐的扫描的名称将在项目管理面板中显示,否则将保持不变。
3
基准对齐
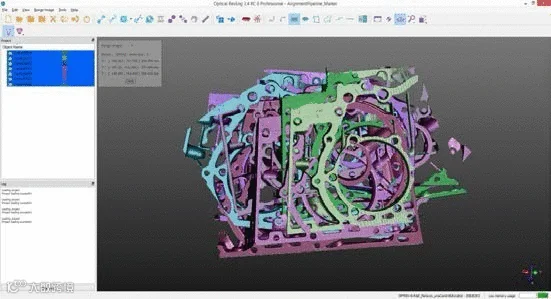
允许利用由第三方摄影测量仪器采集的测量数据通过对摄影测量标志的识别和对齐来约束扫描对齐;
Optical RevEng 应用软件现在可以利用从摄影测量仪器得到的信息约束扫描间的对齐。摄影测量技术要求用户在相关表面放置一些反射标记,然后通过一个照片相机从不同的采集角度拍摄这个表面,最后得到的图片交由摄影测量应用程序进行了分析,并确定了反光标记的精确位置。
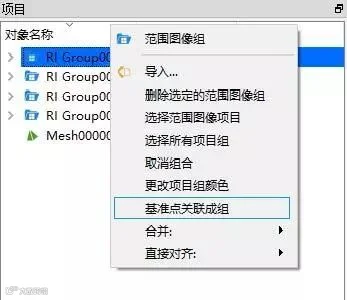
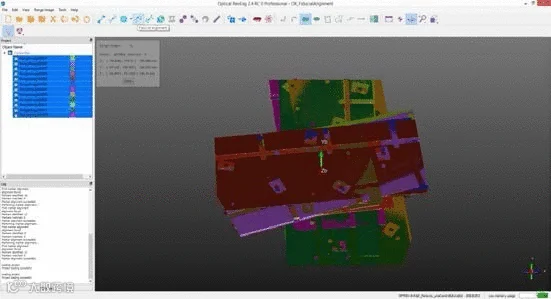
基准对齐
4
点对齐
如果获得的对象不适用于直接对准,或由于太小不适用于任何标记,那么可以在采集之前,在物体上标记一些点(用钢笔或记号笔),然后利用这个点来调整扫描;这个对齐方式与标记对齐算法非常类似,但只适用于相关内容的采集程序。
5
轴对齐
如果一个以校准的 Open Technologies 转台是可用的,那么就可以利用该对齐算法; 此对齐算法仅在有旋转台和相关校准文件存在的情况下可以被激活。
注:只要扫描仪和转台位置保持不变,转台校准就是有效的;否则需要计算一个新的校准。
6
手动对齐
手动对齐算法可以解决即使是最具挑战性的对齐情况,需要一些用户的操作来估计正确的对齐。
7
全局对齐
全局对齐算法同时优化一组中每一个扫描的位置,这样可以得到一个相对于所有扫描的整体误差图。先前算法只对单一扫描的相对位置进行优化,使用全局对齐算法可以得到更小的误差。
微信公众号ID :顶柱科技

关注顶柱科技,更多精彩现场展示