致共筑智能体的技术先锋:
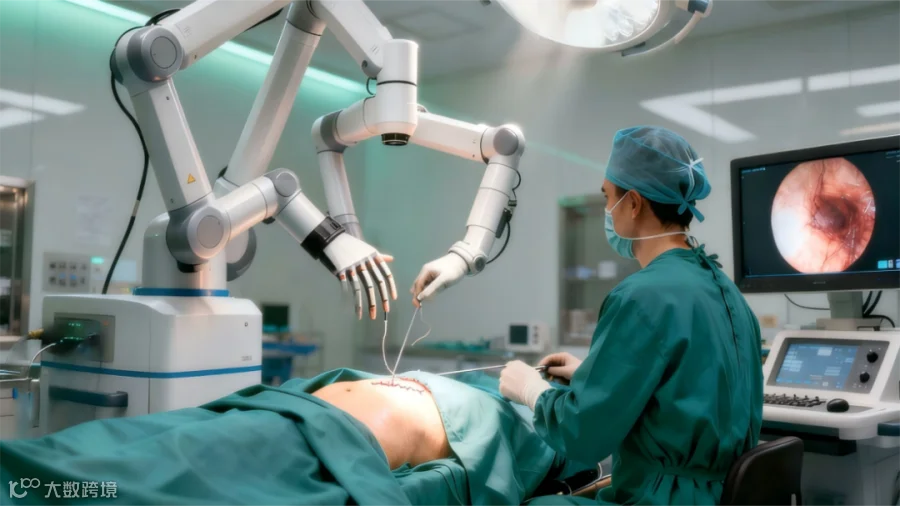
当工业机械臂的关节在200℃高温下仍保持±0.01°的定位精度,当服务机器人的多模态感知系统在商场人流中精准识别老人跌倒并联动避障,当医疗灵巧手与手术机器人协同完成0.1mm精度的组织缝合——这些“具身智能”的惊艳表现,从不是零部件的简单叠加,而是核心部件与总成系统的“智能共生”。
我们深知:一台能在车间连续运转10万小时无衰减的协作机器人,背后是执行器、减速器、控制器在总成中形成的“扭矩-传动-响应”黄金三角;一台能在家庭/医院自由穿梭的服务机器人,依赖视觉、力觉、导航传感器在总成中实现的“数据同步-算法融合-决策优化”闭环;一台能托举生命的医疗机器人,更需要灵巧手、驱动器、无菌结构的总成设计,将“精准度”与“安全性”熔铸为一体。 具身机器人的终极竞争力,不在单个零部件的参数有多漂亮,而在总成后系统能否保持核心效率不减退、环境适应性更完整——这,正是零部件企业与整机厂商最该协同破局的“最后一公里”。
为何是“总成协同”?因为我们懂你的“系统焦虑”
在具身机器人的研发链条中,零部件企业常面临这样的困惑:
你研发的高扭矩密度执行器,在实验室测试中效率达95%,但装机后因整机散热设计不匹配,连续运行1小时温升超标10℃;
你优化的多光谱触觉传感器,单一指标精度超0.05N,却因与整机控制器的通信延迟,导致抓取易碎品时误判力度;
你突破的低功耗AI芯片,理论算力满足需求,却因总成中其他部件的电磁干扰,实际指令响应时间从10ms延长至30ms。
我们相信,零部件的价值,必须在总成系统的“实战检验”中才能完全释放。因此,我们从整机定义阶段便以“为零部件企业提供总成适配验证”为核心,构建了一套“零部件-总成-场景”的三级测试体系:
零部件级:开放实验室的单轴负载、极端温循、电磁兼容测试,验证你在总成中的基础性能;
总成级:模拟工业产线(24小时连续作业)、服务场景(人流/光照突变)、医疗环境(无菌/震动干扰)的总成测试,暴露零部件在系统中的协同短板;
场景级:通过真实产线、社区、手术室的落地数据,反哺零部件的迭代方向(如调整执行器的散热涂层、优化传感器的抗干扰算法)。