

--- 特免皇 · 水产动物免疫增强剂 ---
水产养殖轨道式精准饲料投喂系统设计与试验
摘 要:
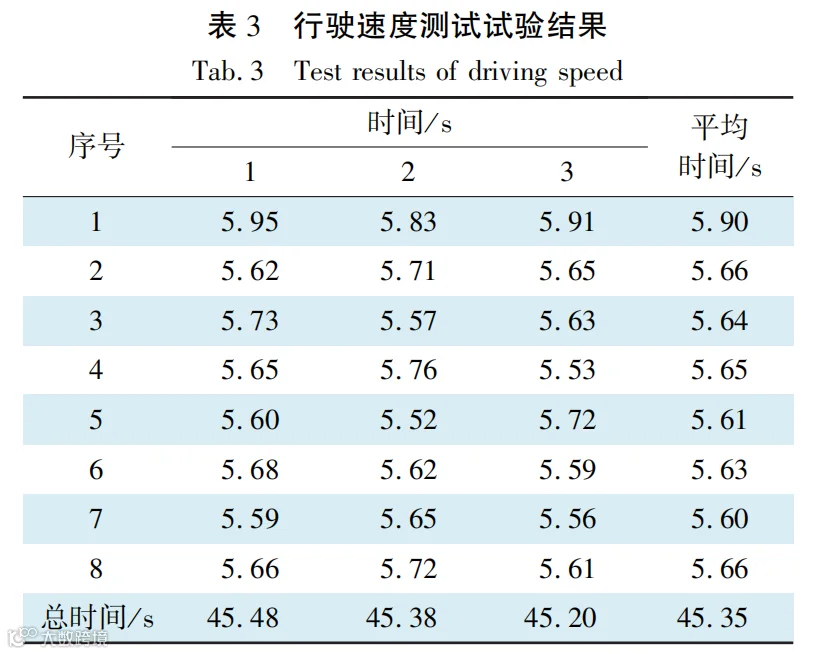
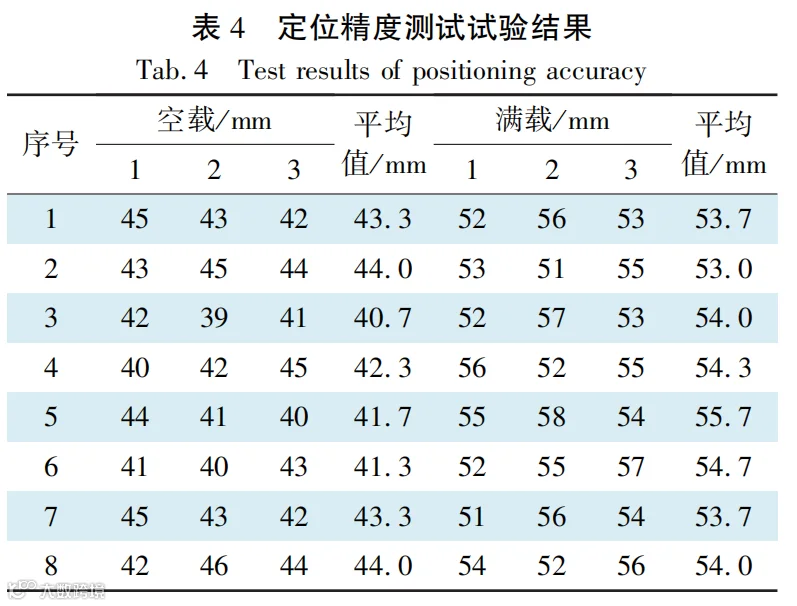
针对水产养殖过程中饲料投喂劳动强度大、投喂不均匀、效率低等问题,设计了一款基于地轨的轨道式精准饲料投喂系统,整套系统集机械结构设计、自动控制系统、上位机监视投喂信息管理系统于一体。通过对系统的行走装置、料仓、下料装置、称重装置等主要关键部件进行设计与理论分析,确定了系统的结构参数,基于 SIEMENS SMART S7-200 PLC 开发了自动控制系统,并以行驶速度、定位精度、投喂速度、投喂精度、饲料破碎率为试验指标进行饲料投喂试验。结果显示:系统运行稳定可靠,可以顺利自动启停,行驶速度为 12.7m/min,定位精度误差范围在 39~58mm,投喂速度为 3.31kg/min,投喂精度误差 < 0.63%,饲料破碎率低于 1%。整个投喂全程自动化运行,上位机能够实时监视系统的行驶过程和投喂过程。研究表明,该系统提高了饲料利用率,降低了劳动成本和投饲成本,同时一体化的投饲设备能更好管理使用,为水产养殖自动化提供了可行方案。
中国是世界第一水产养殖大国和水产品出口大国,2020-2022 年全国水产品养殖产量逐年增加。随着养殖规模扩大,传统人工投喂模式无法满足现代规模化养殖需求,存在劳动强度大、投喂效率低、投饲不均匀等问题,饲料投喂不当还会影响鱼体生长、污染水源,不符合绿色发展理念。因此,研究自动化投饲设备对水产养殖业发展意义重大。
投饲设备正朝着全程机械化发展,现有自动投饲设备多集中在气力式和固定式,轨道式投饲设备研究较少。目前研发的轨道式投饲设备存在造价高、应用场景单一等问题。本研究设计了一款在养殖池边缘架设轨道的投饲设备,成本适中、自动化程度高,具备多种功能,并进行了样机试制。
1 系统总体结构与工作原理
1.1 系统总体结构
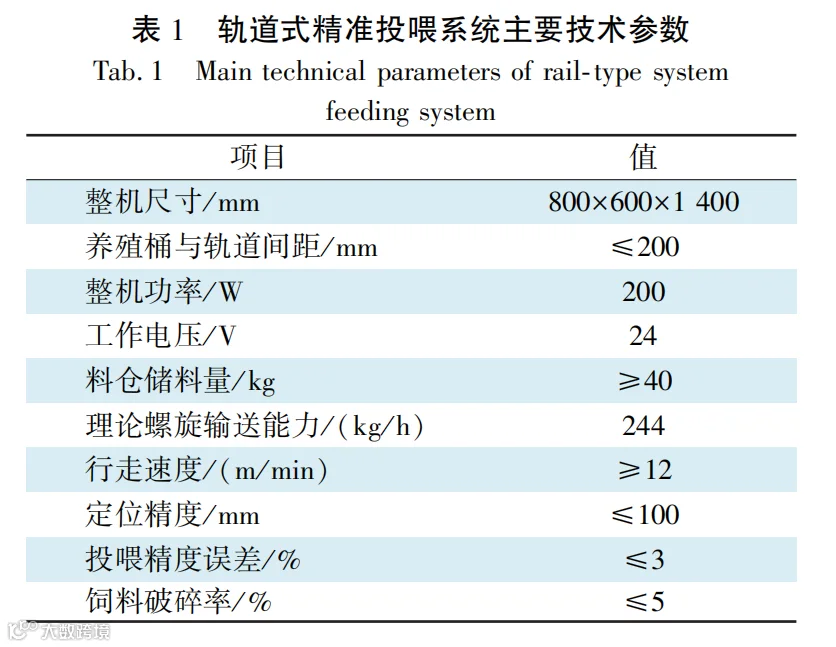
基于应用场景和设计要求,设计的轨道式精准投喂系统集成了机械结构、自动控制系统和上位机监视投喂信息管理系统。机械结构包括行走装置和投喂装置,行走装置用于实现系统的行走定位功能,投喂装置用于实现精准投喂功能。自动控制系统控制整个系统自动化运行,上位机监视系统的行走和投喂过程,并存储投喂信息。系统主要技术参数涵盖整机尺寸、养殖桶与轨道间距、功率、电压、料仓储料量等多个方面。
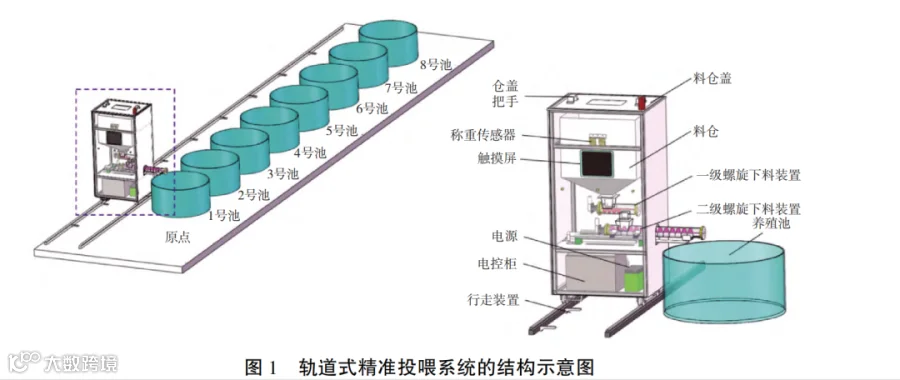
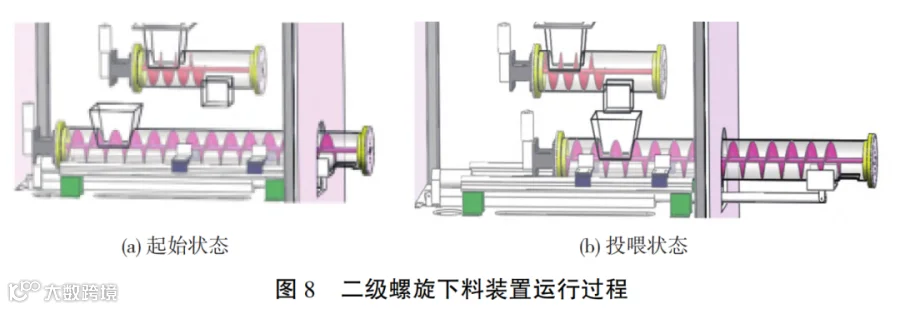
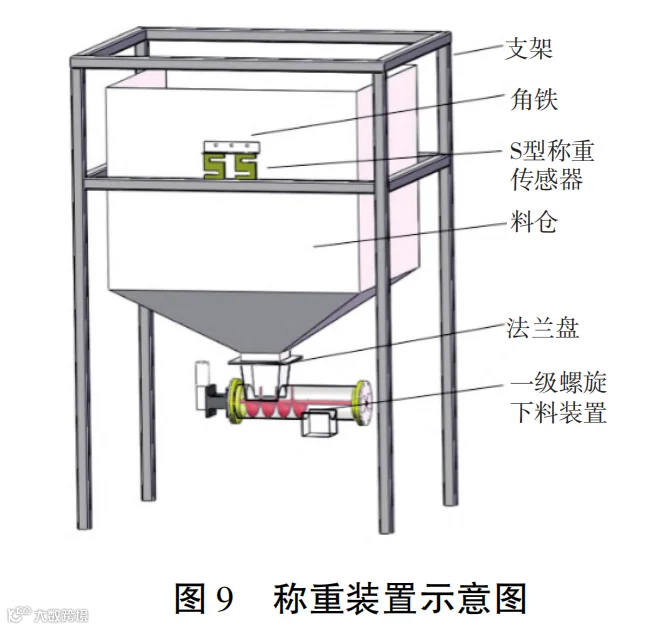
系统工作时,沿轨道行走,到达指定养殖池后发出投喂指令,二级螺旋下料装置伸出,一级和二级螺旋下料装置启动,称重传感器实时检测饲料质量实现精准下料。投喂完成后,二级螺旋下料装置缩回,系统继续前往下一个养殖池投喂,所有任务完成后回到停车原点充电待机。触摸屏可实时监视运行和投喂过程,显示料仓剩余饲料质量并记录投喂数据。
2 系统关键部件结构设计
2.1 行走装置结构设计
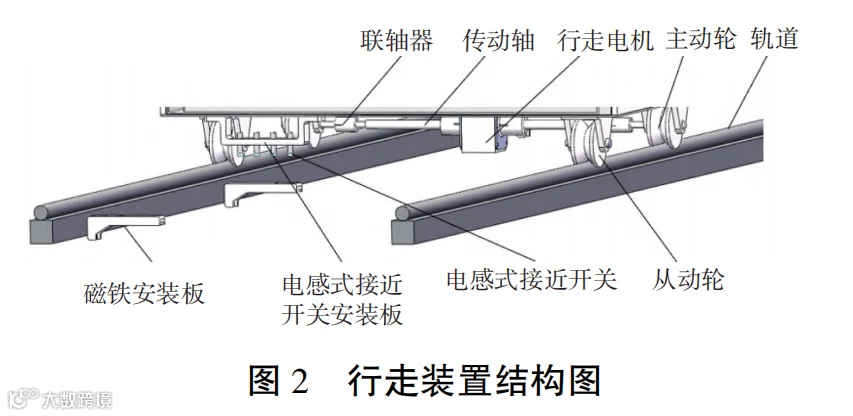
行走装置是实现系统前进、后退、定位的主要部件,由轨道与轨道轮、传动装置、磁铁安装板、电感式接近开关安装板组成。
-
轨道与轨道轮:轨道由特定规格的方钢和镀锌圆钢焊接而成,两侧平行,设有固定磁铁安装板的通孔。选用 U 型轮作为轨道轮,材料为 45 钢,能保证运行稳定性。 -
传动装置:由传动轴、联轴器、行走电机组成,行走电机通过联轴器与传动轴相连,为系统提供驱动力。通过计算最大静摩擦力、电机所需最小功率、轨道轮转速等参数,选用了合适型号的双轴直流减速电机作为行走电机。 -
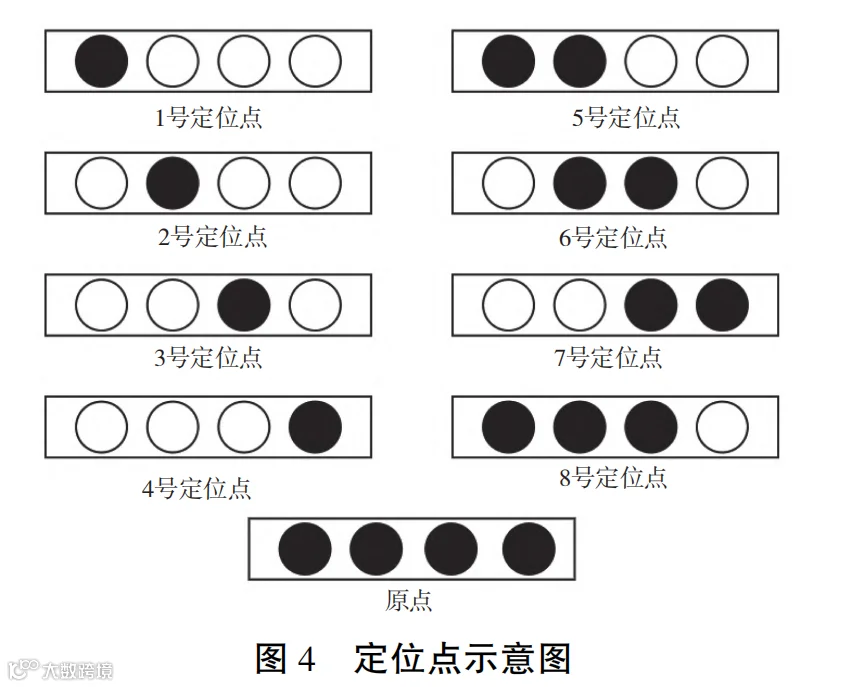
磁铁安装板与电感式接近开关安装板:磁铁安装板存放磁铁,电感式接近开关安装板固定开关,两者孔位对应。通过磁铁和电感式接近开关的配合,可获取多个状态用于定位,选用的电感式接近开关检测精准、安全稳定。 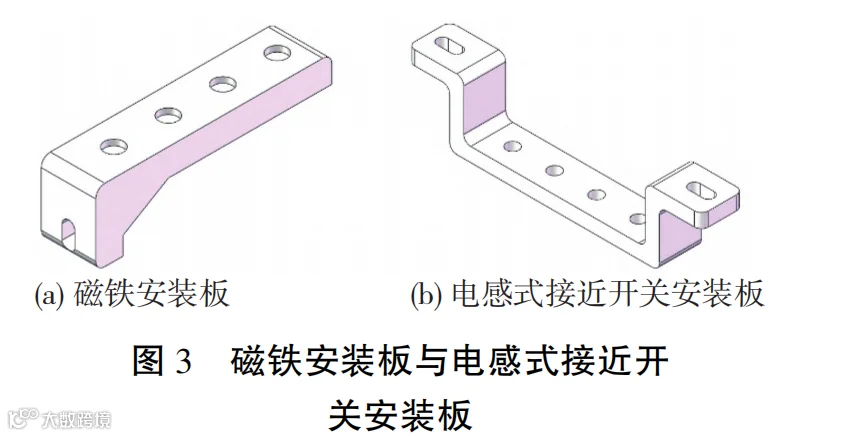
2.2 料仓结构设计
2.3 下料装置结构设计
-
一级螺旋下料装置:是固定件,通过法兰与料仓连接,由下料电机、联轴器等部件组成,将饲料输送到二级螺旋下料装置。 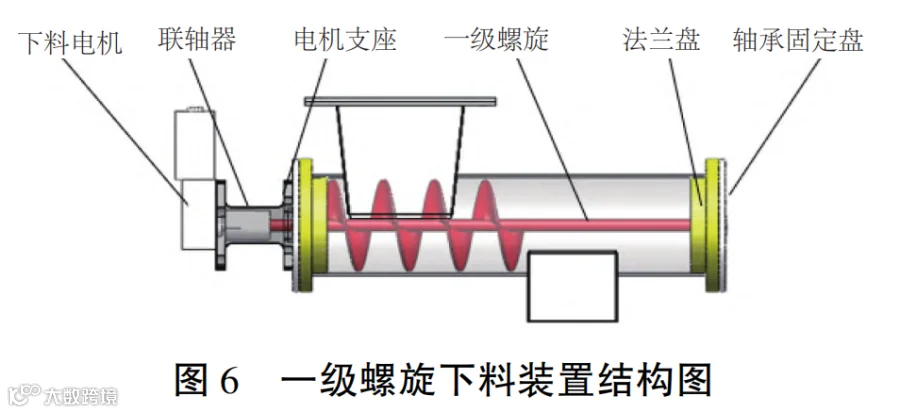
-
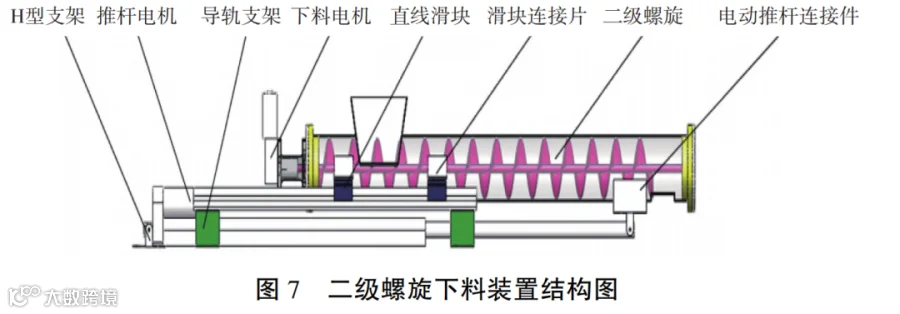
二级螺旋下料装置:是移动件,沿直线导轨往复运动,由 H 型支架、推杆电机等部件组成,将饲料输送到养殖池。设计了满面式螺旋叶片,通过计算确定了螺旋叶片直径、螺旋轴直径、螺距等参数,还选择了合适型号的直线导轨。
2.4 称重装置结构设计
3 控制系统设计
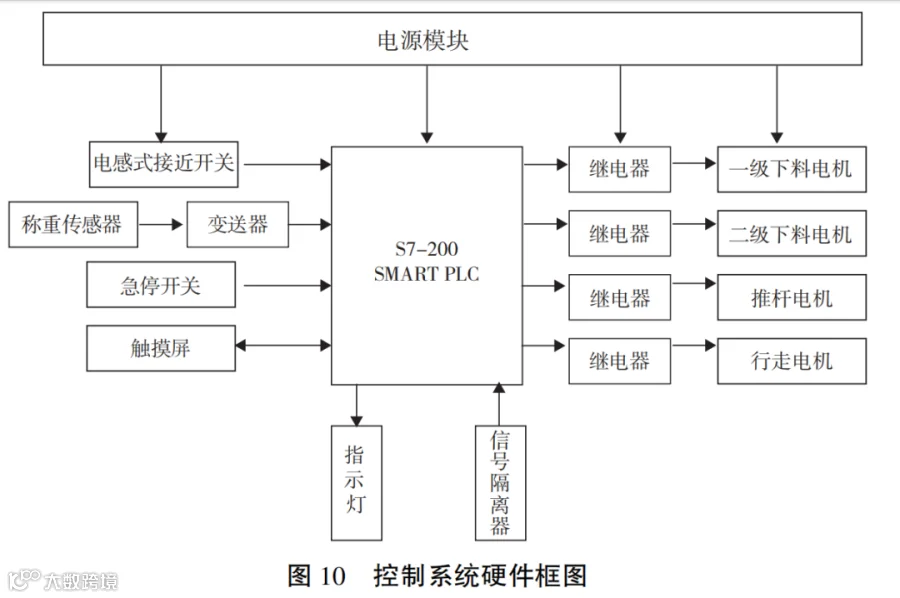
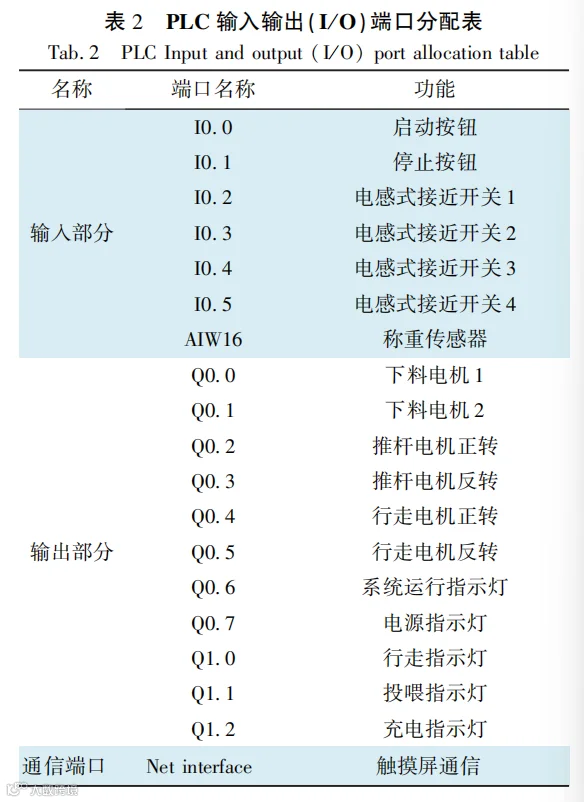
3.1 控制系统硬件设计
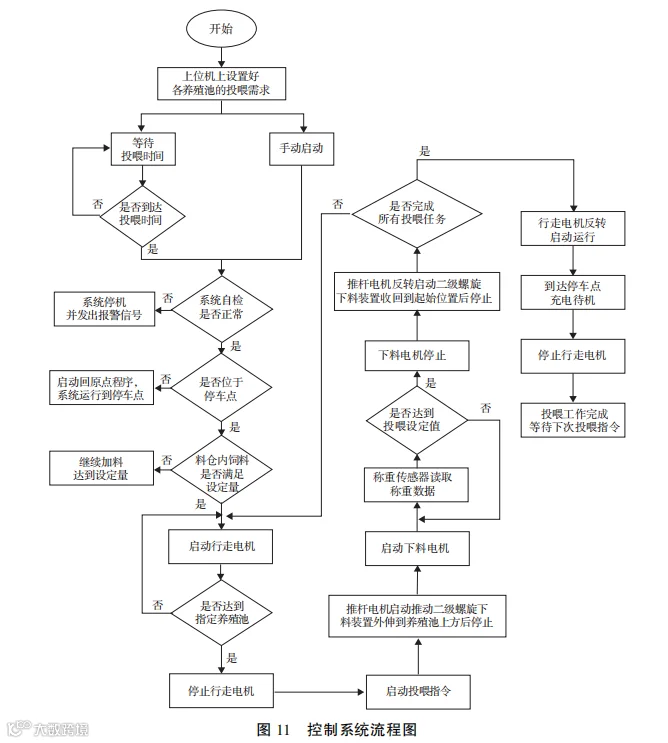
3.2 控制系统软件设计
3.4 人机交互界面设计


4 系统性能测试
4.1 试验条件与测试内容
4.2 试验材料与设备
5 结果与分析
5.1 行驶速度试验
5.2 定位精度试验
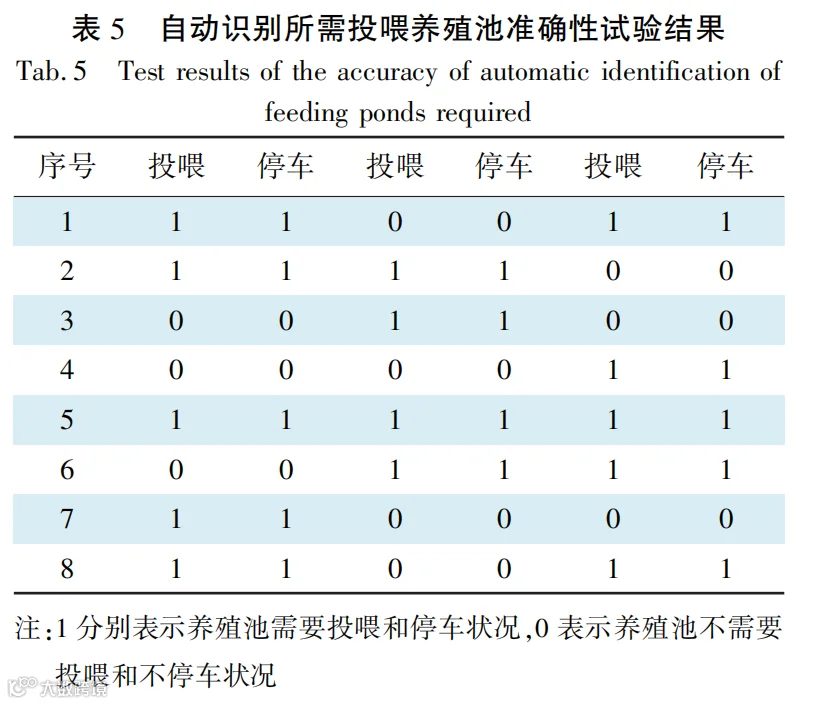
5.3 自动识别所需投喂养殖池准确性试验
5.4 投喂精度和投喂速度试验

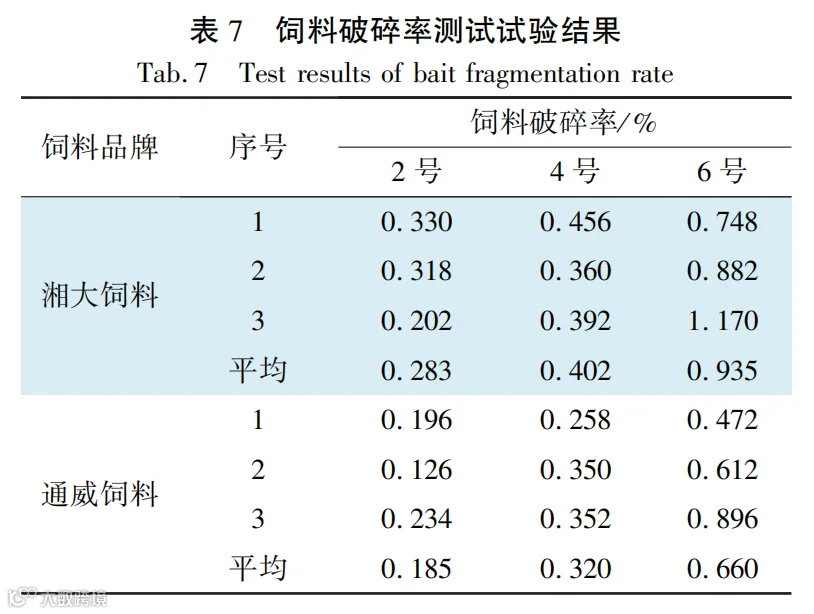
5.5 饲料破碎率测试
5.6 比较分析
6 结论






