

给飞机、机器人甚至水果“穿”上一层电子皮肤,科研团队已成功实现。
近期,中国科学院理化技术研究所国瑞研究员、清华大学深圳国际研究生院汪鸿章助理教授和天津大学黄显教授联合团队,发明了一种“热缩”制造新方法。该方法成功将新型半液态金属电路印制在热塑性薄膜上,加热后电路能紧密包裹至任何形状物体表面,并随热缩膜同步变形,有效解决了传统刚性材料在基底变形过程中的电路失效问题。
值得注意的是,这种形状自适应电子器件具有高耐用性,即使经过 5,000 次弯曲和扭曲循环,导电性变化也极小。
(来源:Nature Electronics)
国瑞表示,此前的方法需要根据物体形状提前对电路进行改造和设计,而新方法不仅简化了制造步骤、降低了成本,还能自动贴合各种形状与表面,如同为物体穿上了一层具备良好适应性的电子皮肤。
审稿人评价称,一系列实际应用展示了该方法在应用层面的潜力,为共形电子器件的制造提供了一条替代路径,对可穿戴电子设备的发展具有重要意义。
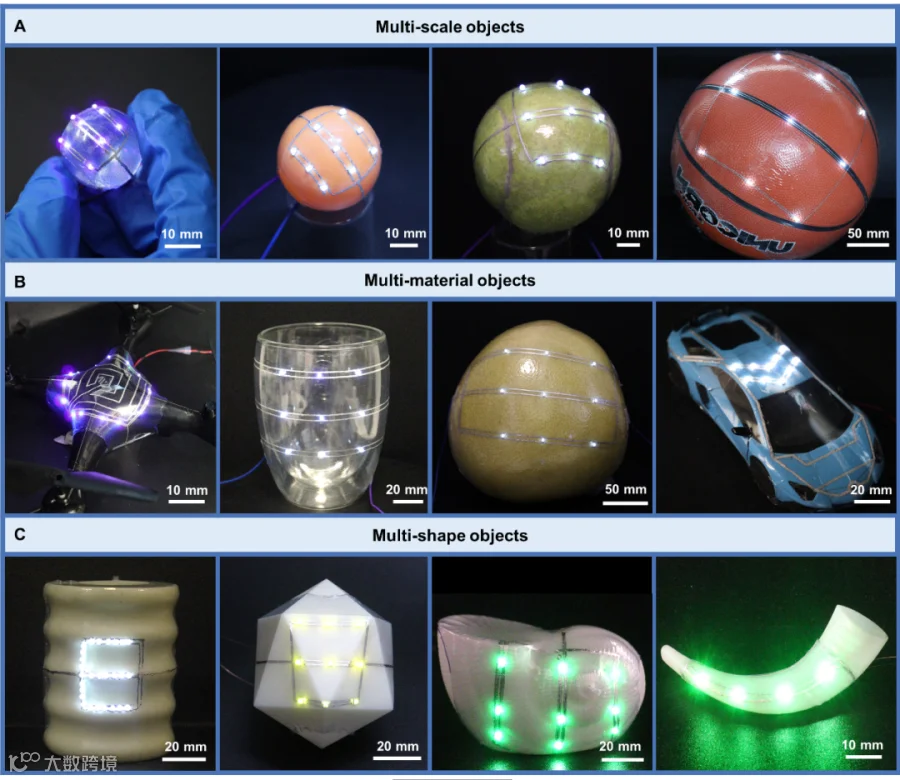
图丨柔性电路在各种材质的异形表面实现共形集成(来源:Nature Electronics)
相关论文以《基于热塑性薄膜上印刷的液态金属电路的形状自适应电子器件》(Shape-adaptive electronics based on liquid metal circuits printed on thermoplastic films)为题发表在 Nature Electronics。
从液态金属到电子皮肤:一次关于“包裹万物”的尝试
国瑞的主要研究方向是液态金属柔性电子。随着智能机器人、具身智能领域的火热,如何将柔性电子与人体器官表面信号监测结合成为研究焦点。
实现这一结合需攻克共形电子难题,即如何将柔性电子制备在人工关节、智能头盔、汽车弧形触控面板等三维物体表面。此前相关研究虽已探索该方向,但共形电子电路对基底材质存在限制,且部分方法可能对基底造成损伤。
研究团队希望开发一种更简单、低成本的方法,突破基底限制,在更多材质表面制备柔性电子。

图丨研究团队主要成员(来源:受访者)
灵感来源与方案确立
研究初期,团队曾尝试用 3D 打印将液态金属打印在三维物体表面,但精确控制喷头运动需要成本高且操作复杂的专业设备。
一次偶然的生活启发带来了突破:无论瓶身形状如何,矿泉水瓶上的薄膜都能适应地包裹物体表面,且材料普遍、成本低。研究人员联想到,若将液态金属电路先制作在某种薄膜上,再利用热缩特性机械包覆在物体表面,即可不受基底材质限制并满足低成本要求。
(来源:Nature Electronics)
材料改良与工艺细节
实现“包裹万物”的三维曲面电子器件,半液态金属功不可没。此前常用的镓和铟合金虽导电性和变形拉伸能力高,但流动性强,易受重力影响。
为解决该问题,团队在合金中掺杂微米级铜颗粒,制成流动性较低的复合物金属铜 - 镓铟(Cu-EGaIn)。针对半液态金属可能导致的不均匀性问题,团队采用类似丝网印刷的方法,先在液态金属预涂一层粘结底胶,再利用胶水将半液态金属均匀铺设在 PVC 聚氯乙烯热缩膜表面。
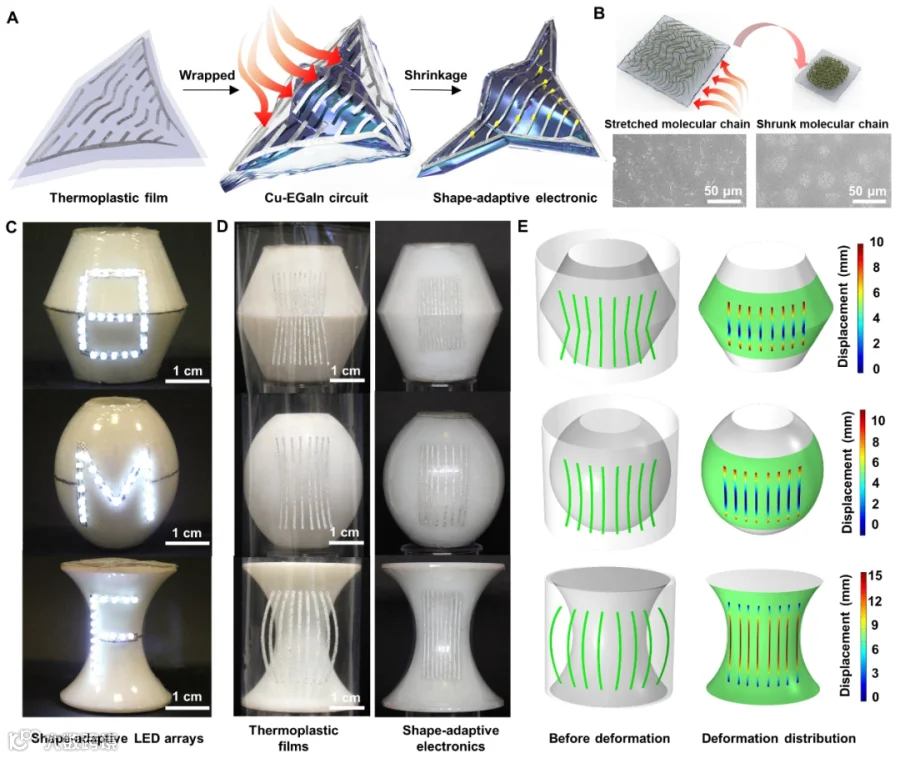
图丨形状自适应电子设备的概念与设计(来源:Nature Electronics)
国瑞解释道,该方案提高了曲面上的稳定性,导电性较纯液态金属提高了 30%。铜颗粒限制了液态金属流动性,避免了其在三维表面受重力影响出现流动及不均匀情况。
当薄膜被加热至玻璃转化温度区间(约 57-70.6°C)时,内部预拉伸储存的内应力释放,驱动薄膜均匀收缩,紧密包裹在球体、飞机模型、机器人手臂和水果等目标物体表面。
针对半液态金属与基底粘附性较差的挑战,团队对比多种媒介后选用了聚丙烯酸甲酯(PMA)胶水。该胶水成本低、操作易、弹性强,能与热缩膜共同变形,并可通过 3D 打印机挤出,水分挥发后迅速固化成膜。
最终,经过热风枪或热水浴短暂加热,带电路薄膜实现自适应贴合,形成共形电子器件。整个过程快速、简便、成本低,无需复杂昂贵设备。
下一步:让机器人真正拥有“电子皮肤”
现有柔性电子制备技术如 3D 打印、激光直写通常适用于光滑物体表面,且激光直写可能损伤基底本体或改变原有性能。
相比之下,新技术对基底材质种类的限制和损伤较小,无论是光滑、粗糙还是湿润表面,均无需额外干燥处理即可实现物理包覆,且热损伤和表面损伤更小。
技术优势与应用场景
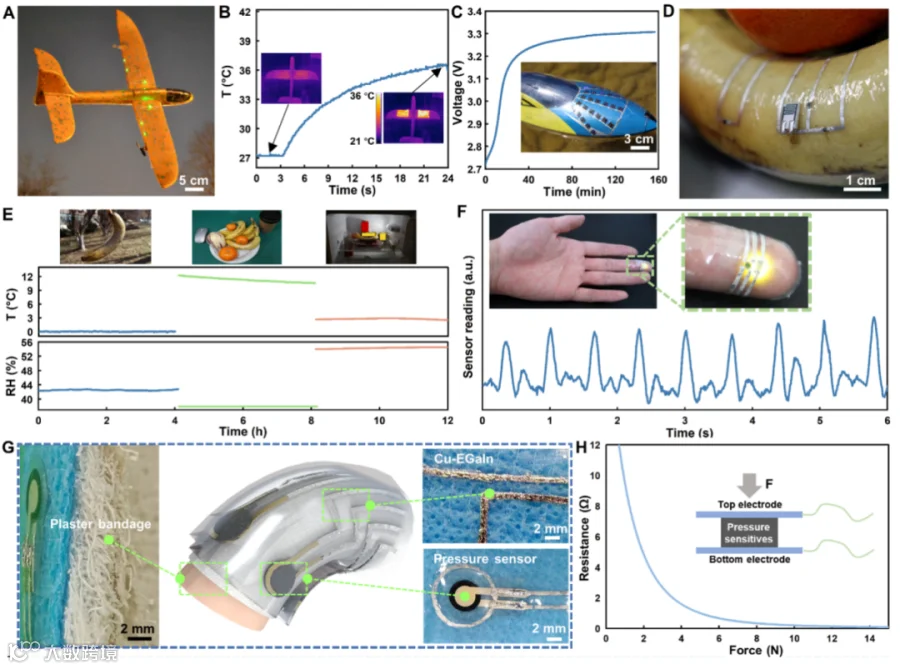
研究团队展示了该技术在多领域的应用潜力,包括 3D 打印不同材质物体、飞机或船舶曲面表面、水果蔬菜表面,以及机器人和生物医学领域等。
图丨多形态自适应电子器件的演示(来源:Nature Electronics)
商业化落地与未来规划
论文发表后,已有相关公司或单位联系团队,希望结合具体需求,如将传感器包裹物体监测特定信号,或通过核磁共振监测线圈监测信号等。
国瑞认为,通过机器人表面共形电路实现智能化是广阔的商业落地转化方向。该技术对物体形态无特定限制,能将传感器制备在工业、人形及四足等各种型号机器人表面。
未来,团队计划深入研究高密度、高精度传感器阵列,探索三维物体上的制造工艺,并将电路精度推进到微纳尺度,以更好地应用于机器人触觉或植入式电子器件等领域。
参考资料:
1.Jiang, C., Li, W., Wu, Q. et al. Shape-adaptive electronics based on liquid metal circuits printed on thermoplastic films. Nat Electron (2026). https://doi.org/10.1038/s41928-025-01528-6