
蚂蚁灵波 投稿
量子位 | 公众号 QbitAI
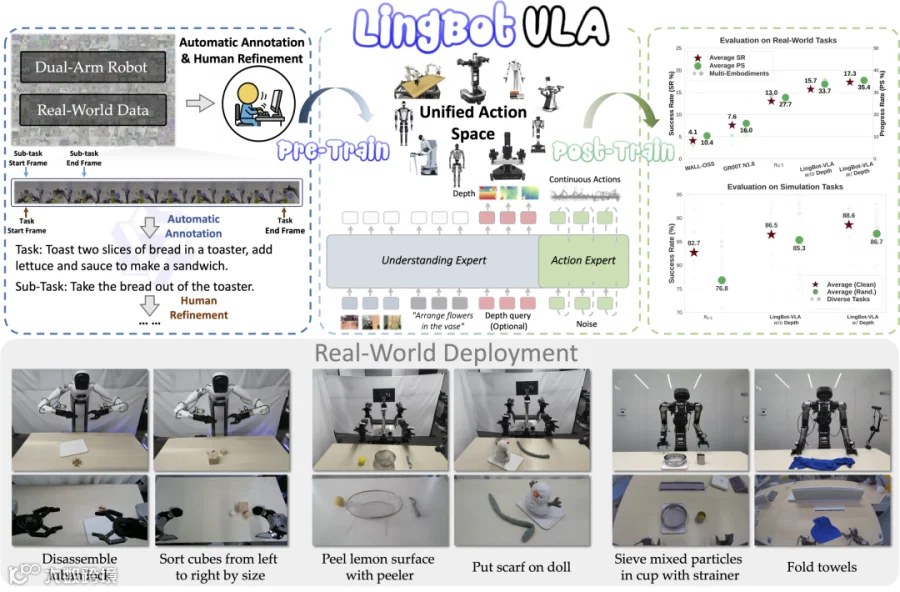
蚂蚁集团旗下具身智能公司灵波科技宣布,全面开源其具身基座模型LingBot-VLA的真机后训练工具链。
开发团队可基于该工具链,利用自有数据快速完成LingBot-VLA在特定机器人平台及任务场景下的迁移适配。
填补真机适配空白
当前具身智能领域开源模型日益增多,但将模型实际部署至真实机器人仍面临显著工程门槛。不同机器人在机械臂构型、末端执行器、传感器配置及控制接口等方面差异较大,导致适配工作高度定制化,相关技术链路长期被视为各团队核心know-how,极少对外公开。
四大关键能力开源
本次开源覆盖真机适配全流程四大核心环节:
- 支持多LeRobot数据合并与关节维度映射标准化的数据处理工具;
- 面向真机场景优化的训练配置;
- 离线评测工具;
- 支持编译加速的真机部署模块。
LingBot-VLA提供含深度与不含深度两个版本,适配不同硬件与任务需求。
高性能具身基座模型
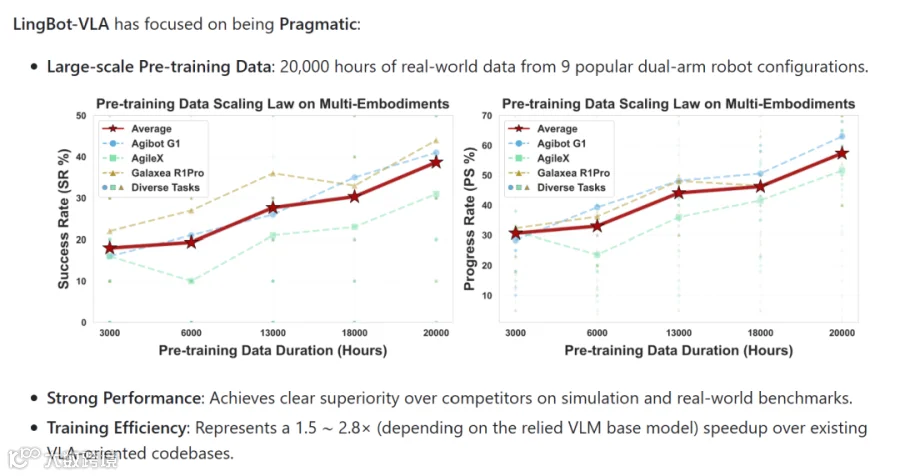
LingBot-VLA基于2万小时真实机器人数据预训练,覆盖9种主流双臂机器人构型,具备跨本体、跨任务泛化能力。在真机与仿真评测中均优于行业基准π0.5,并已完成与乐聚、松灵、星海图等厂商多机型验证。
仅需150条演示数据即可实现高质量任务迁移;底层代码深度优化,训练效率达StarVLA、OpenPI等主流框架的1.5~2.8倍,显著降低数据与算力成本。
开源信息
LingBot-VLA代码库已上线GitHub,模型权重同步发布于Hugging Face和ModelScope。