
无人机自主导航核心:定位建图与运动规划
智能无人机实现自主导航需解决两个协同核心问题:定位建图与运动规划。定位建图模块实时确定无人机位置并构建环境地图,据此生成路径规划粗略轨迹,经轨迹优化(满足平滑性、无碰撞及速度/加速度约束)后交飞控执行。
无人机运动规划由两部分构成:路径规划(前端)负责生成可行路径,轨迹优化(后端)完成精细化处理。常用算法中,前端路径规划采用Dijkstra、A*、JPS等搜索算法及PRM、RRT等采样算法;后端轨迹优化则以Flatness与MPC系列为主导。
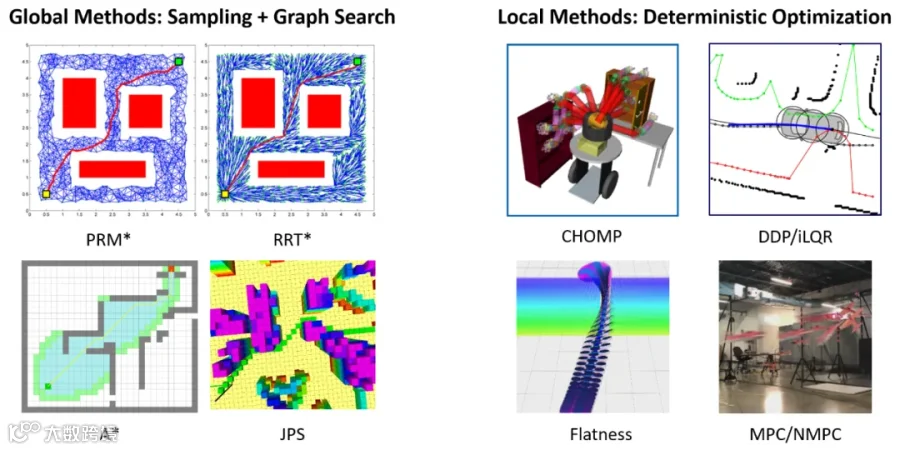
图1 无人机常用规划算法示意图
随着低空经济快速发展,无人机算法人才需求激增,其中运动规划人才尤为紧缺。该领域涉及矩阵运算、优化理论及C++编程,叠加AI自主导航等智能化趋势(应用占比67%),导致自学门槛较高。为提升技术能力,深蓝学院推出《Motion Planning for Mobile Robots》课程,聚焦实用规划算法及ROS系统部署实践。
主讲老师
高飞博士,浙江大学控制科学与工程学院长聘副教授、博士生导师,FAST实验室副主任。研究聚焦空中机器人、集群机器人、运动规划、环境感知与SLAM领域,在Science Robotics、IEEE TRO等顶级期刊会议发表论文60余篇,曾获IEEE TRO 2020"傅京孙"最佳论文荣誉奖、IROS 2021最佳应用论文提名等多项国际学术荣誉。
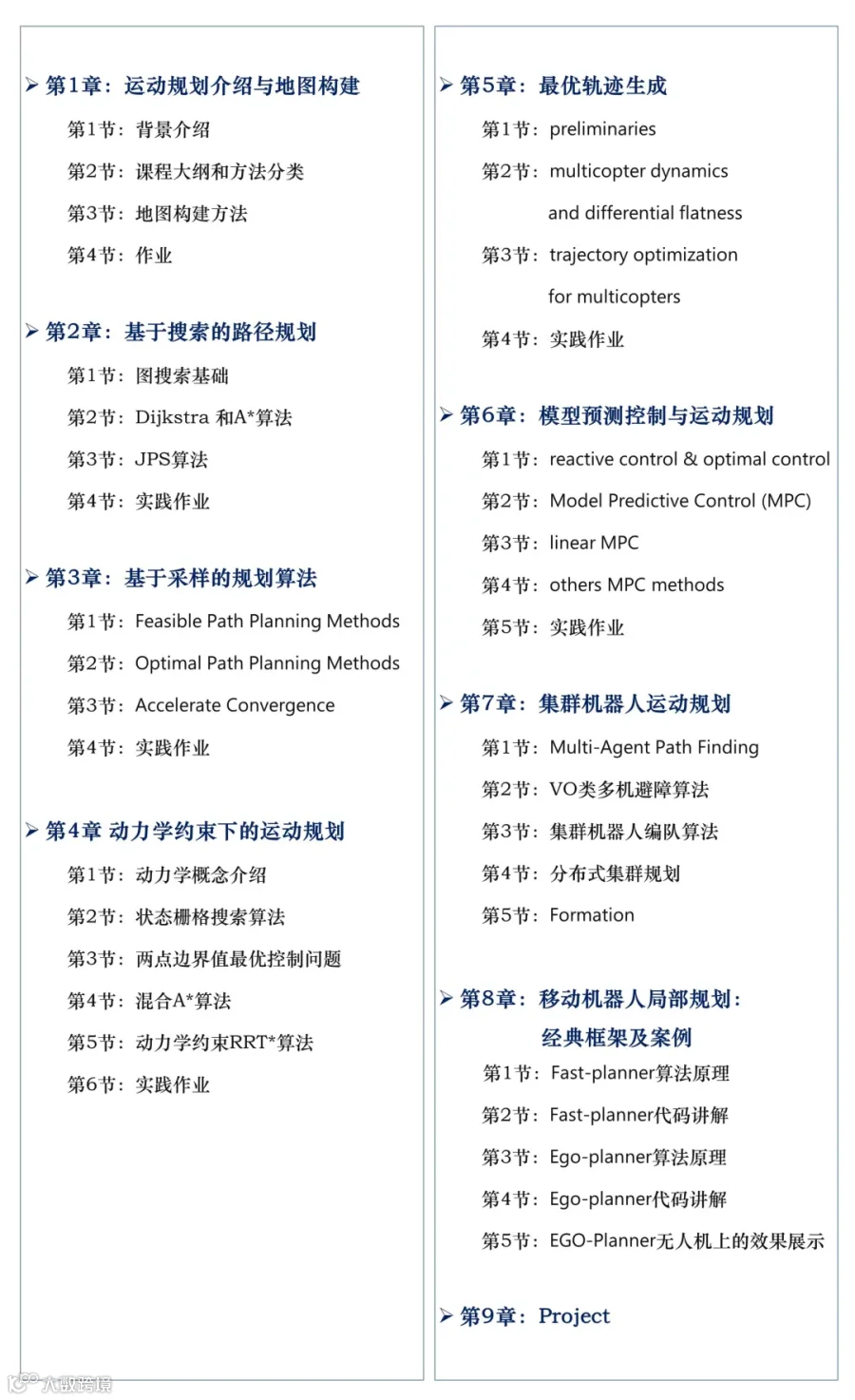
课程大纲
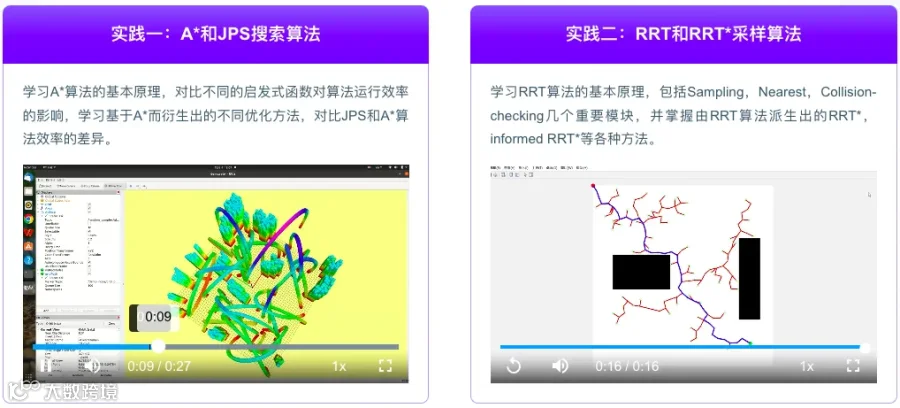
项目实训
课程亮点
系统讲解机器人运动规划核心算法,强化ROS系统实践能力,通过真实项目实训掌握规划算法部署全流程。
文章转载自:深蓝前沿