本文发布已获得《都市快轨交通》授权
原文发表于《都市快轨交通》
第 37 卷 第 1 期 2024 年 2 月
如有转载请联系版权方,标明出处
摘要:火灾是城市轨道交通车站内影响最为严重的事故之一,科学合理的安全疏散方案是突发火灾时确保乘客出行安全的重要保障。然而,目前地铁车站火灾疏散方案中的疏散路线难以根据火场情况动态调整。针对地铁车站疏散路径固定单一的弊端,基于地铁车站内的监控系统,利用计算机视觉技术识别人员分布信息和火灾发生位置,建立空间拓扑模型,利用改进的蚁群算法规划出耗时最短且转弯次数较少的疏散路线,实现站内乘客更科学高效的疏散,最后通过3个场景的案例应用验证本文所提疏散方法的有效性。
关键词:城市轨道交通;计算机视觉;人员分布;路径规划;智能疏散;火灾
文章编号:1672-6073(2024)01-0069-06
城市轨道交通车站作为乘客出行的集散场所,通常承载了大量乘客,由于大部分车站位于地下,相对封闭,且车站内有楼扶梯、检票闸机等多种设施,结构复杂,因此,一旦发生火灾等紧急情况,极易引起站内乘客的恐慌,发生拥挤踩踏事件,造成严重的生命财产损失。鉴于此,科学的疏散方案以及高效的疏散路线,对于城市轨道交通安全运营以及乘客安全出行至关重要,同时也是运营实践和学术研究关注的焦点。在运营实践中,虽然每座车站均有火灾应急疏散方案,但是车站内只有疏散应急灯、安全出口标志等以引导乘客疏散。
这些方案和疏散标志的设置通常采用固定模式以及固定信息形式,无法根据火灾现场的具体情况随机应变;尤其是在结构复杂的地下车站,难以适应随机发生的火灾以及实时发生的火场情况,也难以满足现代化科学安全防护需求。在学术研究方面,张培红等[1]对火灾时人员疏散行动能力的研究表明,疏散时间受到火源位置、报警设备可靠性、消防管理水平、人员分布特点、待疏散人员的工作状态、人员的生理心理状态以及人员之间相互的社会关系等因素的影响。田娟荣等[2]综合考虑了建筑物结构和人员行为对疏散的影响,模拟了各种不同出口条件下的人员疏散过程。张景钢等[3]运用Pathfinder疏散软件模拟大学图书馆复杂场景下人员疏散情况,研究烟雾、火势等因素对人员疏散的影响。曹祥红等[4]基于火场固定疏散标志提出用于火灾疏散路径动态规划的新型改进的蚁群算法。张克诚等[5]针对传统安全疏散方法寻优控制能力不好、自适应控制性能较差的弊端,提出基于粒子群寻优的地铁火灾扩散时人员安全疏散路径寻优模型。左松涛等[6]基于城市地铁站内人员疏散路径规划问题,对疏散路径的实际长度、有效宽度及通行难易度3种特征属性进行综合评价,引入了路径通行难易度的理论计算公式,提出用当量长度作为路径综合评价的结果。王华伟[7]针对不同位置的火灾行为,基于A*算法制定了作业人员的最优疏散路径规划方案,实现了考虑火灾蔓延的人员动态安全疏散。综上,大部分相关研究主要针对单起点、单出口的疏散路径进行优化研究,很少考虑站内人员真实分布以及火场的实时发展等实际情况对疏散路径的影响。事实上,在真实的地铁车站疏散过程中,逃生出口多,站内人员分布广泛,疏散起点和疏散终点不唯一,但是多数优化模型中未能考虑火场实时信息对疏散路径的影响。为解决以上问题,本文首先利用计算机视觉方法将从地铁车站监控视频中获得的火灾位置信息、影响范围信息以及疏散乘客分布情况,映射到对应的车站拓扑空间模型中;然后,以火场中的火源信息以及疏散乘客分布信息为要素,构建疏散成本函数;最后,考虑疏散路径长度、疏散路径曲直度、疏散出口通行效率等信息,构建空间多起点、多出口疏散路径优化模型,得到综合考虑火场信息的车站内疏散路径。
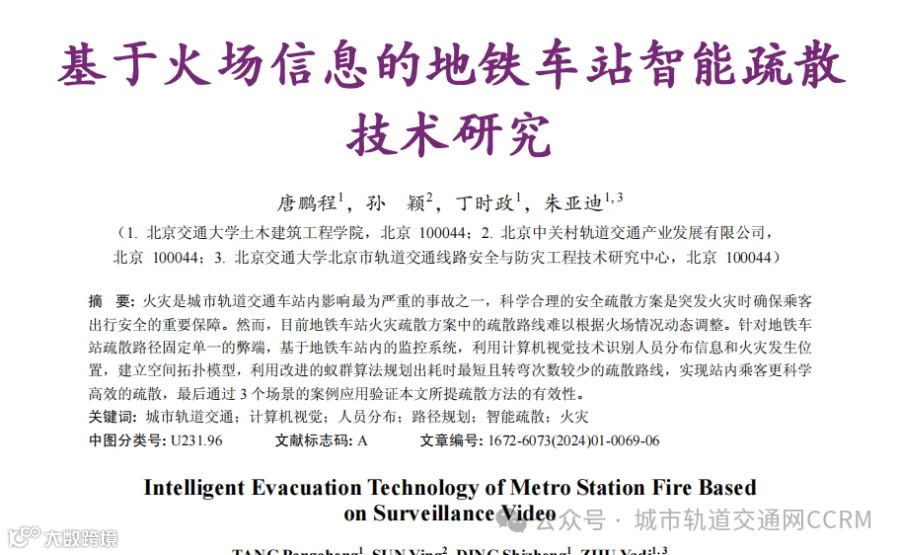
本文利用两个YOLO(youonlylookonce)框架分别进行人群分布识别和火源位置识别。YOLO是一种基于深度神经网络的对象识别算法,其最大的特点是运行速度快,可以实现目标的实时快速检测[8]。对于人群分布识别框架,为了获取更加精准的人群分布信息,本文选用人员头部检测方案,以准确定位监控视频范围内人员的坐标分布,识别流程框架如图1所示。
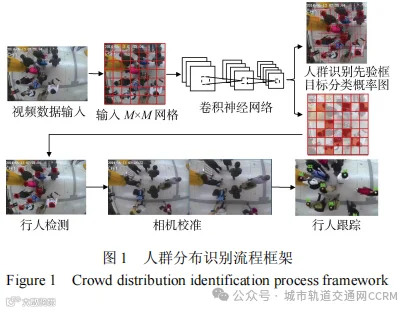
以火源图片进行训练得到火源识别卷积神经网络权重参数,识别流程框架如图2所示。
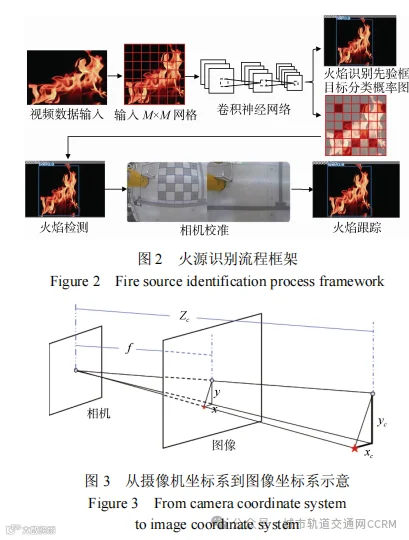
首先,将视频数据输入到识别框架中,把视频中的每个图像帧提取出来,以检测其中所有可被识别的行人;其次,识别框架对图像进行尺寸重构以方便程序进行处理,并将调整后的图像划分为M×M个网格单元(如7×7);然后,根据训练得到的卷积神经网络(convolutionalneuralnetworks,CNN)获得人群识别先验框和目标分类概率图,计算得到行人头部检测框;根据中心点的x和y坐标、宽度w和高度h来确定人员位置,并利用相机校准技术将得到的像素坐标转换到世界坐标系中,如图3所示。图中,f为相机焦距,Zc为摄像机到人群/火源的距离,xc、yc为人群/火源的相机坐标,x、y为人群/火源的图像坐标。同理也可以获得火源在世界坐标中的位置坐标。算法的具体实现过程可以参考文献[9]。2空间拓扑模型构建为了更好地进行疏散路径优化计算,需要以场地的某个地点为坐标原点构建整个疏散空间的拓扑模型,将车站空间结构、人群分布以及火源分布等映射到空间拓扑模型中;因此,需要将世界坐标系中的点位坐标转换为实际场景坐标。摄像头标定的世界坐标系和实际场景的坐标系之间会有尺度、旋转、平移的差别,本文基于奇异值分解算法求解点集间的转换矩阵[10]。基本计算式为BA=´ + rt(1)式中,A为通过计算机视觉算法识别得到的点在世界坐标系中的坐标集合;B为相应点在实际场景中的坐标集合;r为旋转矩阵;t为平移向量。下面通过图像中的3个基准点寻找变换矩阵向量。寻找两个点集的平均中心,具体计算式为
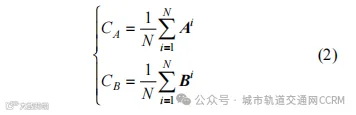
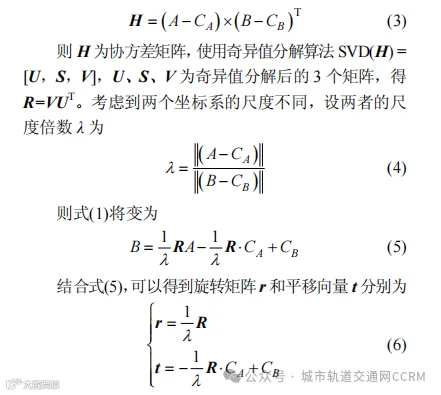
式中,CA及CB分别表示摄像机及真实场景中3个基准点的中心坐标;Ai和Bi是三行一列的向量;N为基准点的个数,此处取3。寻找旋转矩阵r并求出平移向量t。令( ACBCAB)( ) ´ TH=- -(3)则H为协方差矩阵,使用奇异值分解算法SVD(H)=[U,S,V],U、S、V为奇异值分解后的3个矩阵,得R=VUT。考虑到两个坐标系的尺度不同,设两者的尺度倍数λ为( ) ( ) ABACBCl - = -(4)则式(1)将变为11BA= - ×+ l l RRCCAB(5)结合式(5),可以得到旋转矩阵r和平移向量t分别为11CCABl l ì ïï = í ï ïî =- × + rRtR(6)得出旋转矩阵和平移向量后,即可由世界坐标计算疏散空间中各点的实际场景坐标,从而构建得到空间拓扑模型。
合理的疏散路径是火灾疏散的重要内容,也是智能应急疏散的核心技术之一。疏散路径规划是在复杂的地铁车站环境下,按照一定的规则要求基于路径规划算法规划一条合理路径以引导人员安全、高效地疏散至安全区域。目前常见的路径规划算法主要有传统算法(如Dijkstra算法和A*算法)和智能仿生学算法(如遗传算法、蚁群算法等)。然而,不同算法根据其原理和性能的差异表现出不同特点。本文将两类算法的特点进行融合,利用蚁群算法良好的全局优化能力,融合A*算法提高计算效率,设计出融合的疏散路径规划算法,其流程框架如图4所示。
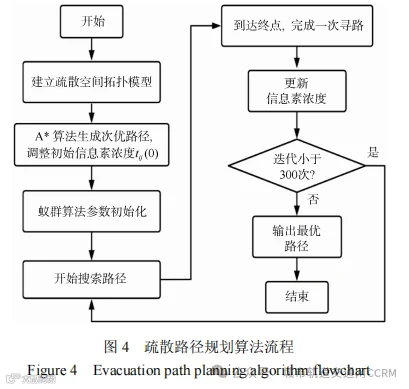
首先,针对疏散空间进行栅格划分,然后利用A*算法进行次优路径规划,其基本思想是,根据评价函数,从起点开始不断向目标点的方向进行搜索。其评价函数为
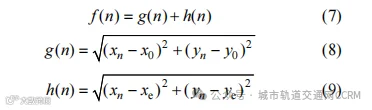
式中,xn、yn表示当前人群所在的位置坐标,x0、y0表示起点的位置坐标,xe、ye表示终点的位置坐标;f(n)是节点n的综合优先级。当选择下一个要遍历的节点时,总会选取f(n)值最小(综合优先级最高)的节点。在评价函数中,g(n)是过去的成本函数,称为耗散函数,用于评价起点到当前点的代价;h(n)是当前的成本函数,称为启发函数,用于评价当前点到目标节点的代价。A*算法记录每一次搜索确定的点直至终点,生成所耗成本最小的路径。基于A*算法生成的路径,对相应的栅格进行信息素浓度τij(0)的调整,增加次优路径上的信息素浓度,增量为Aij,对初始信息素浓度τij(0)进行调整,即τij(0)作如下的变换:t t ijij(0)= +0A(10)式中,τ0为初始信息素浓度默认值。蚁群算法参数初始化,将次优路径上信息素浓度增量Aij设置为8。路径搜索效率从A*算法的18.69s以及传统算法的17.55s压缩到融合A*蚁群算法的12.93s,搜索时间显著缩短,在实际场景中疏散效率可以得到提高,适用于实际疏散场景。
经典蚁群算法中,距离启发函数仅考虑从当前节点到下一节点的能见度,未能体现全局性信息。可以通过监控视频数据获取疏散空间的所有信息,综合考虑终点的导向作用。因此,本文针对距离启发函数增加下一节点与终点之间能见度djt的计算,增强疏散路径的目的性,使得地铁车站火灾中乘客疏散更具方向性。为了提高搜索最短路径的效率,对两段距离之和的倒数进行平方。基于以上改进策略,重新构建距离启发函数ηij为21()ijddijjth = + (11)式中,i为当前节点;j为下一节点;t为终点。由于车站内部人员比较密集、伴随烟雾等恶劣条件及群众的恐慌心理,若疏散路径过于曲折、转弯次数过多,车站内的待疏散乘客会因为过度恐慌迷失方向,使逃生变得更加困难,疏散效率降低。因此,本文通过计算转弯角度θ并统计转弯次数tn,考虑转弯惩罚z(转弯角度θ越大,z值越小。当路径顺直,不需要转弯时,z=1。随着tn的增加,蚁群算法中的状态转移概率pkij(t)值变小),对pkij(t)进行调整,加入转弯惩罚系数并统计转弯次数以减少路径搜索中发生转向的概率,降低疏散路径的复杂程度,提高逃生路径的平顺性,从而降低乘客迷失方向的可能性,转变惩罚函数的计算式为
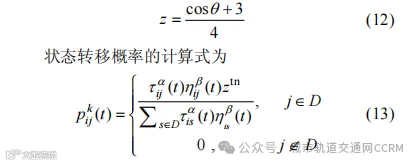
式中,z的取值范围为0.5~1;α为信息素浓度函数的重要性系数;β为距离启发函数的重要性系数;τij(t)为信息素浓度函数;ηij(t)为距离启发函数;D为蚂蚁下一个可移动的节点集合。算法改进前后路线对比如图5所示,
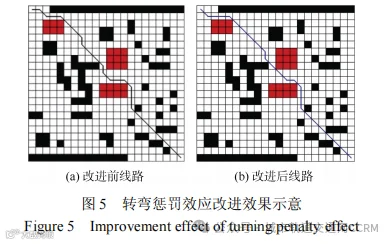
优化后疏散路线的转弯次数由11次降至8次。实际路径疏散过程中,由于车站客流较大,位于最短疏散路径上的出口因通过能力有限,可能会出现拥堵状况。在这种情况下,所有乘客选择距离最短的疏散路径可能会降低疏散效率。考虑出口拥堵效应的疏散优化思路是,针对距疏散出口最近的人群进行路径规划及疏散出口选择;然后根据规划选择结果,更新各个疏散出口的人群分布数据;结合各出口的通过能力,计算拥堵系数并将其作为疏散距离权重,从而进行疏散路径规划。
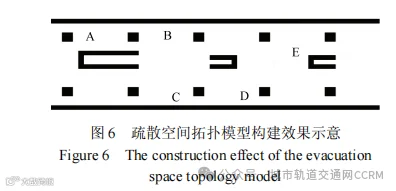
本文以北京地铁某车站为例,构建疏散拓扑网络模型。利用离线视频数据识别站台上乘客分布及数量,假设火灾位置构建疏散空间拓扑模型,如图6所示。不同人群分布情况及不同的人群密度会对疏散过程产生不同的影响,因此将人群分布情况划分成3个场景进行分析,以便更好地理解和评估算法的性能。
场景1:待疏散人群的密度差异不大且分布位置相对均匀。这种情况下,人群之间有足够的空间来自由移动,拥挤系数对疏散过程的影响较小。主要考虑距离出口最近的原则进行路径规划,算法能够有效应对疏散需求。
场景2:待疏散人群中有一部分密度较大且分布位置相对集中,而其他部分人群密度较小。这种情况下,需要考虑拥堵情况和优化路径规划,避免拥挤和排队。算法不仅考虑距离出口最近的原则,还需要灵活调配,选择相对较近但未发生拥挤的出口进行疏散。场景3:待疏散人群的分布位置较为均匀,但人群密度在两侧较高,中间较稀疏。这种情况下,需要对各个出口进行合理安排,考虑拥堵情况并选择畅通的路径进行疏散。算法根据实际情况灵活调配人群,并优先选择较为稀疏的出口进行疏散。通过图7的3种场景分析可以全面了解算法在不同人群分布情况下的表现,评估其适应性和效果,并进一步改进和优化疏散路径规划算法,以应对不同的疏散需求。3种场景的模拟效果如图8所示。人群分布场景1的待疏散人群密度差异不大(待疏散人群1~4分别为100、150、100、200人),分布位置相对均匀。
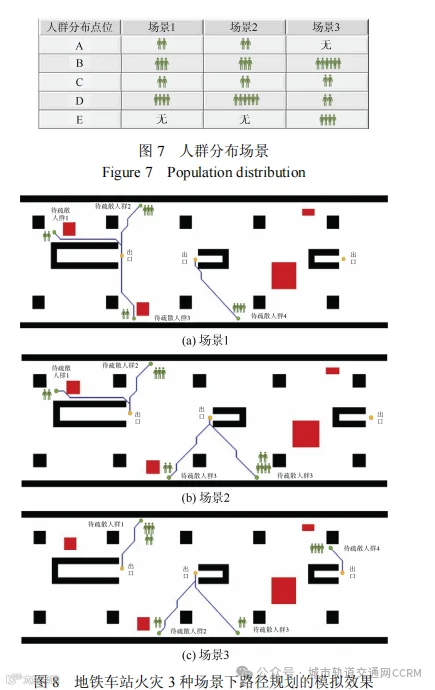
由图8(a)可以看出,在人员分布较为均匀的情况下,算法主要依据离出口最近的原则进行疏散路径规划,寻路方向性较好,路径平滑、顺直,转弯次数少,且由于该场景下待疏散人群密度不算大,待疏散人群相互之间有足够的空间来自由移动,因此拥挤系数对疏散过程的影响并不显著,其作用不会有明显的体现,符合实际疏散情况,可以有效应对人群疏散需求。人群分布场景2(待疏散人群1~4分别为100、150、100、300人)中,待疏散人群4密度较大,人群分布位置相对集中靠左。由图8(b)可以看出,在人员分布相对集中的情况下,算法并不是单纯按照离出口最近的原则进行疏散路径规划,如待疏散人群3的疏散路径中,考虑了左侧出口受待疏散人群1、2的影响而出现的拥堵,从而并未选择最近的左侧出口进行疏散,而是选择了相对较近但不需要排队的中间出口进行逃生,拥挤系数作用得到了具体的、有效的体现。同时,整体的疏散路径规划也具有良好的方向性。基于待疏散人群分布靠左的特征,优先选择左侧出口进行疏散,以更好地适应实际情况。这样的路径规划导致路径平顺,转弯次数较少,符合实际疏散情况的要求。即针对待疏散人群分布场景2中人员密度较大、分布位置相对集中靠左的情况,疏散算法并非简单地依据最近出口原则进行路径规划。它不仅考虑拥堵情况,而且还选择了合适的出口以实现拥挤系数的作用。此外,该算法还考虑到待疏散人群分布靠左的特点,优先选择左侧出口进行疏散,从而使得路径平顺,转弯次数较少,与实际疏散情况相符合。人群分布场景3(待疏散人群1~4分别为250、100、100、200人)中,待疏散人群分布位置较为均匀,人群密度呈现中间稀疏(待疏散人群2、3密度小)两侧密集(待疏散人群1、4密度大)的状况。由图8(c)可以看出,在待疏散人群分布位置较为均匀的情况下,整体按照人群分布均匀的特征,对各个出口都安排相应的人群进行疏散。算法根据出口拥堵情况进行灵活调配,实施疏散路径规划,如待疏散人群2的疏散路径中,考虑了左侧出口受高密度的待疏散人群1的影响而出现的拥堵,所以并未选择最近的左侧出口进行疏散,而是选择了相对较近但未发生拥挤状况的中间出口进行逃生;待疏散人群3的疏散路径中,考虑了右侧出口受高密度的待疏散人群4的影响而出现的拥堵,所以并未选择最近的右侧出口进行疏散,同样选择了相对较近但未发生拥挤状况的中间出口进行逃生,符合实际疏散情况。
1)通过构建空间多起点、多出口疏散路径优化模型,可以得到综合考虑火源位置、人群分布、出口位置等火场信息的车站内疏散路径。2)采用A*算法生成次优路径,以该路径调整蚁群算法的初始信息素浓度,可以提高蚁群算法的求解效率。3)为确保疏散路径的平顺性,通过引入转弯惩罚因子,可以显著减少乘客逃生路径的转弯次数。后续研究可考虑站台人群位置及密度分布,加入出口拥堵程度对疏散效率的影响,为待疏散乘客选择更快的疏散路
参考文献
[1] 张培红, 陈宝智. 火灾时人员疏散的行为规律[J]. 东北大学学报(自然科学版), 2001, 22(1): 54-56.
ZHANG Peihong, CHEN Baozhi. Behavior rules of humanevacuation in fire[J]. Journal of Northeastern University,2001, 22(1): 54-56.
[2] 田娟荣, 周孝清. 地铁出口条件对人员疏散的影响分析[J]. 广州大学学报(自然科学版), 2006, 5(1): 78-82.TIAN Juanrong, ZHOU Xiaoqing. Influences of exit conditions in subway on pedestrian evacuation[J]. Journal ofGuangzhou University (Natural Science Edition), 2006,5(1): 78-82.
[3] 张景钢, 尹宜辰, 何鑫. 基于 Pathfinder 模拟高校图书馆火灾疏散[J]. 华北科技学院学报, 2022, 19(6): 24-30.ZHANG Jinggang, YIN Yichen, HE Xin. Simulation of fireevacuation in university library based on Pathfinder[J].Journal of North China Institute of Science and Technology,2022, 19(6): 24-30.
[4] 曹祥红, 杜薇, 魏晓鸽, 等. 一种用于火灾疏散路径动态规划的算法[J]. 消防科学与技术, 2022, 41(9): 1237-1242.CAO Xianghong, DU Wei, WEI Xiaoge, et al. An algorithmfor fire evacuation path dynamicplanning[J]. Fire scienceand technology, 2022, 41(9): 1237-1242.
[5] 张克诚, 宋辉. 地铁火灾扩散时人员安全疏散路径模拟寻优[J]. 信息技术, 2021, 45(10): 61-64.ZHANG Kecheng, SONG Hui. Simulation and optimizationof personnel safety evacuation path in subway fire diffusion[J]. Information technology, 2021, 45(10): 61-64.
[6] 左松涛, 毛占利, 范传刚, 等. 基于地铁站场景的改进型 Dijkstra 算法疏散路径规划研究[J]. 铁道科学与工程学报, 2023, 20(5): 1624-1635.ZUO Songtao, MAO Zhanli, FAN Chuangang, et al. Evacuation path planning based on improved Dijkstra algorithm in metro station scene[J]. Journal of railway scienceand engineering, 2023, 20(5): 1624-1635.
[7] 王华伟. 基于 A*算法的海洋平台火灾避险路径研究[D].大连: 大连理工大学, 2022.WANG Huawei. Research on the fire escape path of offshoreplatform based on A* algorithm[D]. Dalian: Dalian University of Technology, 2022.
[8] 杨萍, 房可佳, 谢元莎. 基于改进 YOLOv3 的火灾识别关键技术研究[J]. 物联网技术, 2022, 12(3): 21-23.YANG Ping, FANG Kejia, XIE Yuansha. Research on keytechnologies of fire identification based on improvedYOLOv3[J]. Internet of things technologies, 2022, 12(3): 21-23.
[9] ZHU Yadi, NI Ke, LI Xiaohong, et al. Artificial intelligence aided crowd analytics in rail transitstation[J]. Transportation research record. https://doi.org/10.1177/03611981231175 (2023).
[10] SORKINE O, RABINOVICH M. Least-squares rigidmotion using SVD [EB/OL]. (2017-01-16)[2023-06-30].https://igl.ethz.ch/projects/ARAP/svd_rot.pdf.
[11] 唐彬, 张德, 彭田琳, 等. 基于改进 A*算法的移动机器人路径规划研究[J]. 机械管理开发, 2023, 38(1): 74-77.TANG Bin, ZHANG De, PENG Tianlin, et al. Researchon path planning of mobile robot based on improved A*algorithm[J]. Mechanica



