本文发布已获得《都市快轨交通》授权
原文发表于《都市快轨交通》
2025年 第2期
如有转载请联系版权方,标明出处
万正阳,周和超,张济民
无人驾驶模式下的循迹控制算法在近年来受到研究者的关注。彭京等分析了多轴轨迹跟随控制原理,建立了智轨电车转向系统模型[5]。孙帮成等设计了协同循迹控制策略,控制列车通过曲线[6]。LENG等针对新型龙门虚拟轨道列车(G-VTT)提出了一种基于预览和跟踪控制器的可扩展级联模块化路径跟随控制策略,通过阻尼调整因子和时滞稳定因子提高控制精确性[7-8]。WANG等提出了一种基于分层框架的路径跟踪策略,实现可重构的控制方法[9]。除此以外,有人驾驶模式也是需要重点关注的研究内容,因为在当前的技术水平下,虚拟轨道列车运行在复杂城市道路中,在个别工况下仍需要人工驾驶的介入[10],且其控制方式与无人驾驶模式存在区别。但目前有关有人驾驶仿真的研究还主要集中在传统汽车领域[11-12],还没有特别针对虚拟轨道列车的仿真研究,影响了虚拟轨道列车的推广应用。针对以上问题,本文主要的研究内容为:建立完整的列车动力学模型,研究有人/无人2种不同驾驶模式下对应的控制方法,并开发可视化界面,构建虚拟轨道列车驾驶仿真平台,实现对虚拟轨道列车不同驾驶模式下的全面仿真。
1虚拟轨道列车驾驶仿真平台总体架构
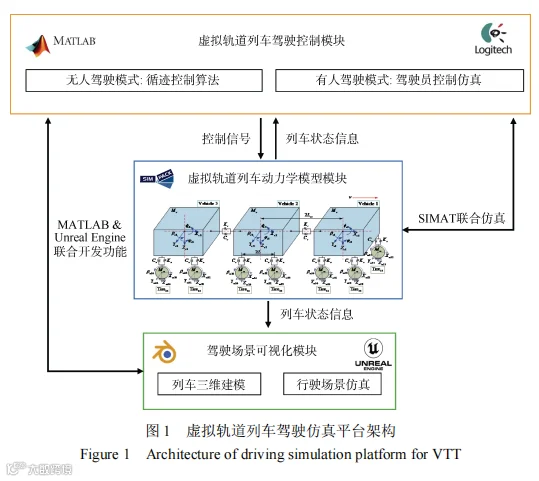
根据以上对驾驶模式的分析,首先提出针对虚拟轨道列车混合驾驶模式的驾驶仿真平台总体架构,采用模块化设计的思想,如图1所示。其中,核心部分是由基于模型预测控制算法(modelpredictivecontrol,MPC)开发的无人模式下循迹控制算法和有人模式下的由Logitech驾驶仿真硬件实现控制输入的驾驶员控制模块。其工作逻辑为:混合驾驶仿真模块从列车动力学模型中获取列车的位置、速度等状态信息,将计算得到的轮胎转角和速度反馈至动力学模型,实现对列车状态的更新。本文提出的驾驶仿真平台的一大亮点为所有控制参数均使用列车动力学模型进行联合仿真计算,提高了仿真的准确性。此外,驾驶可视化模块也从动力学模型中获取列车当前的状态信息,完成驾驶场景的实时更新。其中,虚拟轨道列车的三维建模采用Blender完成,驾驶场景可视化则利用UnrealEngine开发。MATLAB和SIMPACK间采用SIMAT联合仿真模块进行数据交互,而MATLAB和UnrealEngine间的列车状态信息更新则是利用Mathwork的联合开发功能予以实现。
2驾驶仿真平台设计与实现
2.1虚拟轨道列车动力学模型的建立
本文研究对象为3模块6轴架构形式的虚拟轨道列车,其主要参数见表1。基于达朗贝尔原理,构建7个自由度虚拟轨道列车整车动力学微分方程。列车车体的浮沉运动微分方程为
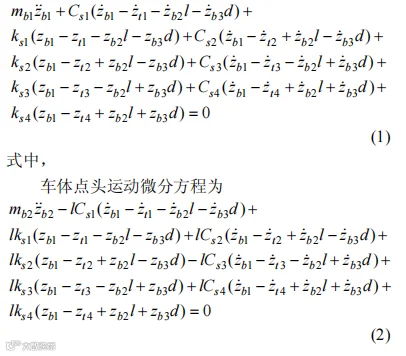
车体侧滚运动微分方程为
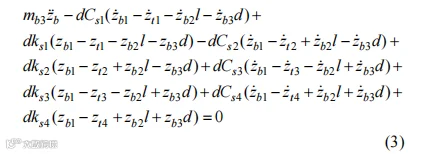
单节车厢上车轮垂向振动微分方程为


式中,i取1、2、3、4时分别表示列车右前轮、右后轮、左前轮和左后轮;mb1,mb2和mb3分别为车体绕x,y,z轴的转动惯量;mti为第1辆列车上i车轮的质量;zb1,zb2和zb3表示列车车体浮沉位移、点头位移、侧滚位移;zti为i车轮的垂向位移;csi为i车轮的二系阻尼参数;ksi为i车轮的二系弹簧刚度参数;d为轮距的一半;l为车体质心与前后轴的距离;Fti为i车轮-道路耦合动态作用力。车体间的纵向、横向和垂向动力学方程为
式中,Fxca,Fyca和Fzca分别为车间纵向、横向和垂向力;Kcx,Kcy和Kcz分别为车间纵向、横向、垂向刚度参数;Ccx,Ccy和Ccz分别为车间纵向、横向、垂向阻尼参数;Lcc为相邻2节车质心间距离的一半;Xw,Yw和Zw分别为轮胎的纵向、横向和垂向位移;Xc,Yc和Zc分别为车体的纵向、横向和垂向位移。根据以上列车结构参数和动力学微分方程,在SIMPACK软件中构建出虚拟轨道列车动力学模型。SIMPACK可以自动生成每个物体和关节相应的运动微分方程。之后,SIMPACK采用数值积分方法求解运动微分方程,从而进一步计算系统的动力学性能指标。列车动力学模型如图2所示。
2.2无人驾驶模式下的模型预测控制算法开发
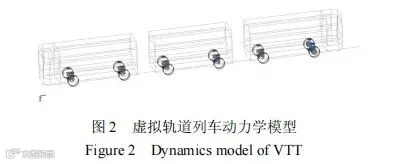
模型预测控制算法的开发采用简化的虚拟轨道列车运动学模型,如图3所示,
且不考虑轮胎因受力而引起的侧偏。本文主要讨论第1根轴的转角控制方法,其余轴则采用列车的多轴液压转向控制系统进行跟随控制,不在本文的讨论范围之内[13-14],而这种跟随转向控制方法已被先前的研究证明是有效的。参考文献[14]中给出了一种具体的多轴跟随控制方法,基于不同轴与首轴间的距离对各轴实行跟随控制,可以有效控制列车通过预定曲线[14]。相关解释可参考文献[14-15]。根据图中几何关系,可推导得到列车运动学方程
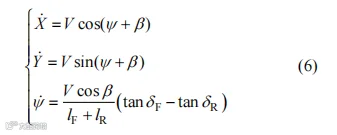
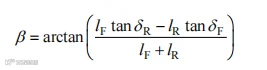
式中,V表示车体质心处速度,lF表示车体前轴到车体质心距离,lR表示车体后轴到车体质心距离,δF表示前轴转角,δR表示后轴转角,ψ代表车辆的横摆角;β代表车辆质心侧偏角。
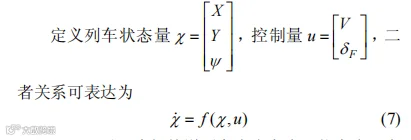
同理,对于虚拟轨道列车在参考点处状态也可表达为类似的形式将式(7)在参考点处进行泰勒展开,忽略高阶项,并与

式(8)相减,得到其中

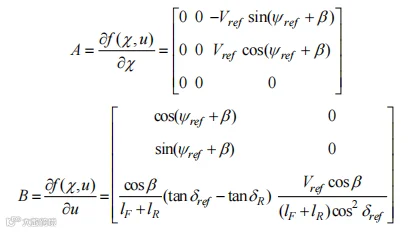
式中,χref表示参考点处列车状态,uref表示参考点处控制输入,Vref表示参考点处车体速度,ψref表示参考点处车体横摆角,k表示k时刻,A% = + TAI,p表示预测时域。对式(9)进行离散化处理,可得式

中,I为单位矩阵;T为离散时间间隔。由式(10)可得任意时刻的列车状态表达式

将各个时刻的状态表达式写为紧凑的矩阵形式,即
为了使虚拟轨道列车可以合理准确跟随目标路径,设计考虑状态偏差和控制增量的目标函数

式中:Q和R为权重矩阵。联立式(12)和式(13),化简为二次规划标准形

式,即可得最优控制序列
将以上最优控制序列中的第1个元素通过SIMAT联合仿真接口传递至SIMPACK中的列车动力学模型进行计算,得到列车状态反馈。在随后的控制循环中重复该过程,如

式(16),从而实现利用模型预测控制算法对虚拟轨道列车进行循迹控制。
2.3有人驾驶模式下驾驶员控制仿真研究
在驾驶员控制的有人驾驶模式下,虚拟轨道列车驾驶系统的基本控制原理为司机通过观察地面上的轨迹标识线调整方向盘,使得车辆第1轴沿轨迹标识线路径行驶,而第2~5轴的中心点按照同样的轨迹路径跟随第1轴行驶,确保整辆车按预定轨迹行驶。与传统车辆的有人驾驶模式相比,虚拟轨道列车可依靠标识线在明确的路径上行驶,其路径是预先规划好的,具有一定的固定性和可预测性。这种约束类似于传统有轨电车系统,使其在运行中表现出类似于轨道交通的高效性和稳定性;而普通人工自由驾驶车辆的行驶路径是灵活和动态的,没有固定的路线,司机完全依靠自身判断决定行驶路线。基于虚拟轨道列车的行驶特点,本文采用如图4所示的LogitechG29驾驶器仿真硬件,用于仿真驾驶员对第1根轴转角和加减速的输入控制量,其余轴采取跟随转向的控制方式。驾驶员控制模块的主要开发过程如下:

首先将驾驶器硬件通过SIMULINK中的G29SteeringWheel连接至控制模块,并进行信号标定以确认对应的通信接口。随后,根据文献[10]中的技术规范及仿真需求,设置方向盘左右转角和油门、刹车的比例系数,从而实现对列车的控制。最后,将对应的控制信号传递至车体动力学模型上预留的数据接口。车体动力学模块在接收到来自驾驶器硬件的信号后,将以上控制输入,结合车体动力学模型进行实时计算,输出车体位置、速度等信息,实现对列车第1轴的转向控制和对速度的控制。其余轴则采用和无人驾驶模式中一样的方式进行跟随。此外,为了模仿真实的驾驶情况,本文开发的驾驶仿真平台设置了信号互锁功能,即当检测到驾驶器硬件所代表的驾驶员控制信号输入时,无人驾驶模式下的MPC控制就会自动停止向动力学模块发送控制信号,从而实现驾驶模式间的自动切换。
2.4驾驶可视化界面开发
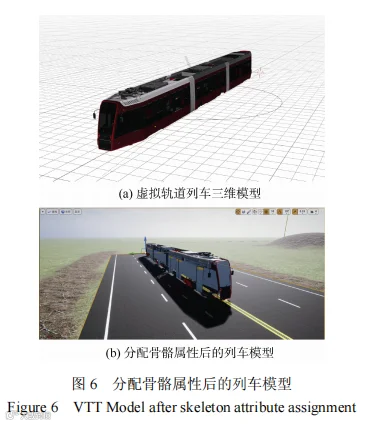
为了全面仿真虚拟轨道列车运行的真实情况,本文使用UnrealEngine和SIMULINK联合开发功能,开发虚拟轨道列车驾驶可视化界面。利用Blender建立虚拟轨道列车的三维模型,如图5所示。

该模型是按照本文研究的3辆编组虚拟轨道列车结构进行建模的。为了保证运算速度和减小模型复杂度,没有建立转向架、受电弓等较为复杂的构件,并使用Blender自带的素材库自动生成部分车体细节,提高建模效率。在Blender中建立车体模型后,通过MATLAB的联合开发功能将模型作为骨架网格导入到UnrealEngine中,在UnrealEngine中为其分配骨骼属性,本平台采用SK_PassengenerVehicle_Skeleton这一属性,得到的分配骨骼属性后的列车模型如图6所示。
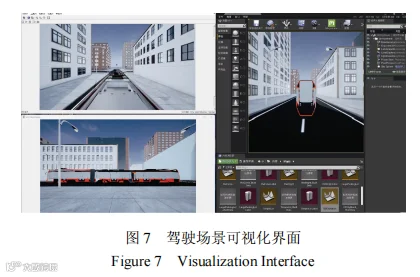
基于MATLAB&SIMULINK自动驾驶工具箱中提供的协同仿真框架,实现UnrealEngine和MATLAB间的共同仿真,并从动力学模型中获取列车状态信息进行实时更新。可视化模块中的车体模型只负责完成驾驶场景的可视化,动力学计算全部在SIMPACK中完成。因此,UnrealEngine只接受动力学模块输出的第1辆车的车体状态信息(车体位置、车体横摆角等)S以进行可视化,忽略后2辆车的信息。仿真的结果表明,采用此种省略算法不会对平台的实用性造成影响。这一协同仿真框架可以在运行控制模块进行建模仿真的同时可视化其驾驶过程。可视化引擎采用EpicGames开发的UnrealEngine4.26,并设置车顶、车右侧和车头3个方位的可视化视角,如图7所示,可以在仿真过程中实时查看列车周围环境和运行情况。
3仿真结果与分析
基于开发的驾驶仿真平台,对虚拟轨道列车进行驾驶仿真,验证平台对于列车驾驶仿真的准确性。分为无人驾驶模式仿真和有人驾驶模式仿真2个部分。研究指标为:不同控制方式下虚拟轨道列车经过30m半径曲线的横向偏差(以各辆车前轴中心为参考点)、轮胎转角和各辆车间铰接角。列车初始速度设置为30km/h,负载工况为AW2。
3.1无人驾驶模式
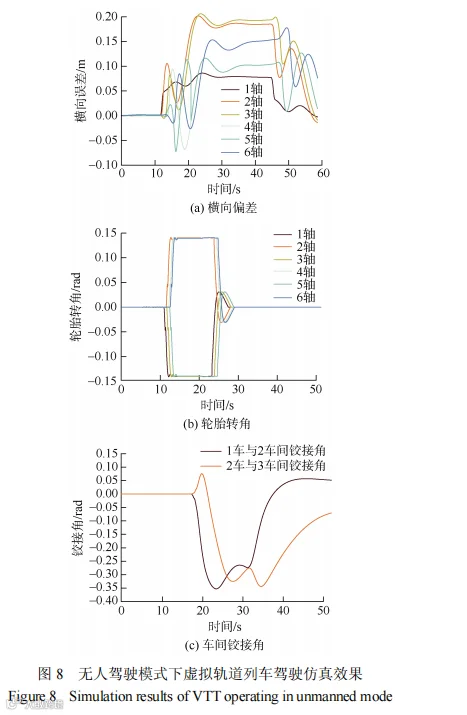
图8为在无人驾驶模式下使用模型预测控制算法得到的虚拟轨道列车驾驶仿真结果。由图8可见,最大横向偏差出现在第3轴,为0.205m;而轮胎转角的变化较为一致,在过曲线时保持在±0.15rad(左转为正,右转为负),保证了较好的驾驶平稳性;车间铰接角的最大绝对值为0.349rad,变化较为平稳,说明列车运行状态比较稳定。根据仿真结果,可以证明本文开发的驾驶仿真平台可以较好地实现对无人驾驶模式的仿真,达到了预期的效果。
3.2有人驾驶模式
图9给出了本文开发的驾驶仿真平台对于有人驾驶模式下循迹横向误差、轮胎转角及车间铰接角的仿真结果。从仿真结果可以看出,本文开发的驾驶平台也可以较好地完成对于列车有人驾驶情况下的仿真研究,达到了预期的效果;有人驾驶模式下的横向偏差较无人模式下并没有出现明显的增加,最大值依旧为0.2m,证明有人模式的仿真可以控制列车沿预定路径行驶;轮胎转角和车间铰接角的变化范围也与无人驾驶模式下基本保持一致,最大绝对值为0.309rad,波动频次较无人驾驶模式略有上升,但总体保持平稳,验证了驾驶平台仿真的有效性。值得注意的是,在有人驾驶的仿真中,轮胎转角的变化相较无人驾驶模式出现了更多的微调。经过分析研究,课题组认为这主要由两方面原因引起的,硬件输入存在的时延会导致各轴的转向响应速度和跟踪精度有所降低,因此需要更为频繁的调整;
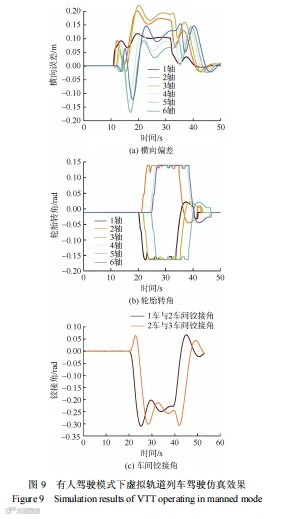
在真实的驾驶场景中,有人驾驶模式也会因为驾驶员的反应时间、环境感知能力不同而比自动驾驶模式更为频繁地调整轮胎转角等控制参数。这一差异也凸显了本文开发的驾驶仿真平台对于研究虚拟轨道列车行驶表现的重要性。本文提出的虚拟轨道列车驾驶仿真平台可以通过对比分析全面评估虚拟轨道列车不同驾驶模式的优缺点。在无人驾驶模式下,仿真平台能够详细记录无人驾驶模式下每个转弯和直线路段的轨迹数据,帮助研究人员分析其控制算法精度和稳定性;在有人模式下,其驾驶方式的灵活性和响应速度与控制算法均有所不同,同时司机的操作会引入更多的变量,导致轨迹可能更为灵活和多样。通过仿真平台,可以记录和分析不同司机操作下的轨迹差异,评估人为因素对列车运行的影响。通过仿真平台的模拟,可以预先发现和解决在实际应用中可能遇到的问题。例如,某些路径可能对无人驾驶模式提出更高的要求,而有人驾驶模式在特定情况下(如紧急避让、绕行等)可能更有效,这些结论可以为工程技术人员优化控制算法和开展驾驶培训提供参考,提高不同驾驶模式下的整体运行效率和安全性,从而可以更为全面地帮助研究人员计算分析虚拟轨道列车在不同驾驶模式下的运行情况和不同参数表现,而不仅仅局限于对循迹算法控制下的虚拟轨道列车行驶研究,拓宽了研究的深度和广度。
4结束语
针对虚拟轨道列车的无人驾驶仿真已经取得了许多成果,但针对有人驾驶模式的仿真研究尚未取得明显进展,也没有开发结合2种不同模式的驾驶仿真平台。基于此,本文开发虚拟轨道列车动力学模型,针对虚拟轨道列车开发模型预测控制算法和驾驶员输入仿真模块,并建立可视化界面,构成可以综合仿真虚拟轨道列车不同运行模式的驾驶仿真平台,填补了相关研究的空缺。研究结果表明,利用本文所开发的驾驶仿真平台可以有效仿真无人、有人2种不同驾驶模式下的虚拟轨道列车行驶情况,各项参数均在合理区间内变化,验证了开发平台的有效性和准确性。本文开发的驾驶仿真平台对于研究虚拟轨道列车的行驶表现有一定的工程价值,对于进一步推广虚拟轨道列车在我国的商业应用也具有重大意义。未来,本课题组还将继续进行相关研究,构建更为完善的虚拟轨道列车驾驶仿真体系。
消息由中国城市轨道交通网CCRM整理编辑,文章来自都市快轨交通,涉及版权请联系删除,如有转载请标明出处)