本文发布已获得《都市快轨交通》授权
原文发表于《都市快轨交通》
2025年 第4期
如有转载请联系版权方,标明出处
潘洪亮1, 2,孙敏达2, 3,李迪2, 3,林源峤2, 3,袁建军1, 2
matictraincontrol,ATC)系统是保障列车安全高效运行的核心技术。作为ATC系统的关键组成部分,列车自动防护(automatictrainprotection,ATP)子系统通过超速防护功能有效确保列车的行车安全。该功能实时监测列车速度,并与系统计算的最大容许速度进行比对,必要时触发制动控制,确保列车速度始终处于安全阈值内。近年来,全球范围内城市轨道交通系统在雨雪等低黏着环境下频繁发生因ATC超速防护失效引发的安全事故,暴露出现有系统在低黏着环境下的脆弱性。针对这一安全隐患,学者们围绕低黏着环境下ATC系统超速防护功能的失效机理及优化策略开展了广泛研究。在失效机理方面,李卫娟等[1]从信号系统测速精度偏差角度,蔡建峰[2]从安全制动模型(safetybrakingmodel,SBM)参数匹配性角度,分别揭示了列车打滑对ATC系统功能完整性的影响;刘婧婧等[3]首次量化了湿轨工况下可保证紧急制动率(guaranteedemergencybrakingrate,GEBR)与安全制动距离的映射关系,构建了黏着系数对GEBR值的影响作用链;梁宇等[4]基于力学模型,仿真验证了列车空转打滑状态下GEBR取值对安全制动距离的敏感性。在优化策略方面,王恒等[5]通过对ATC系统速度控制架构的深入分析,提出基于制动率和限速自适应调整的分级雨雪模式技术方案;孙金龙等[6]以灵活调整车辆制动参数和系统安全防护余量为技术路径,设计了两种既有信号系统的迭代升级技术方案。尽管既有研究取得了一定进展,但仍存在两大显著局限性:第一,黏着系数与GEBR值之间的动态耦合关系缺乏系统性表征,二者对系统超速防护功能的链式影响机制尚未明晰;第二,现有优化策略多局限于单目标静态优化框架,缺乏全过程动态协同机制。鉴于此,本文致力于探讨低黏着环境下ATC系统超速防护控制策略的优化方式。通过分析超速防护功能的作用过程与失效机理,构建融合轮轨动态黏着特性的超速防护仿真模型,并针对现有控制策略的局限性,设计“感知-决策-控制”一体化的多目标协同优化控制策略,以期降低ATC系统超速防护功能的失效概率,增强城市轨道交通系统的整体稳健性。
1ATC系统超速防护功能作用过程分析
1.1安全制动模型
现代城市轨道交通ATC系统普遍采用移动闭塞制式。在此技术框架下,区域控制器实时采集列车的位置与速度信息,动态生成移动授权(movementauthority,MA)并实时下发至ATP子系统。车载ATP依据SBM,以MA边界前向叠加一定安全防护距离后的位置为虚拟目标点,自动生成紧急制动减速(emergencybrakingdeceleration,EBD)曲线,继而推导获得ATP顶篷速度曲线和ATP紧急制动触发曲线。ATC系统通过这3条曲线实时监督并调控列车运行状态。SBM作为系统的核心理论基础与计算依据,其防护原理如图1所示。
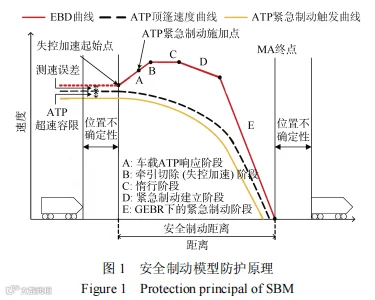
SBM模型通过五阶段动态防护过程,完整表征了系统从风险感知、制动触发直至列车完全停止的全过程最不利场景。
1.2可保证紧急制动率
GEBR是ATC系统的核心输入参数之一,指综合考虑环境因素和制动设备潜在故障模式后,列车在平直轨道上所能达到的最小紧急制动率[7]。GEBR设定值直接影响ATP系统的曲线计算,进而对整个城市轨道交通系统的运营效率产生显著影响。具体而言,GEBR取值越大,列车预期紧急制动距离越短,列车之间的追踪间隔也可相应减小,系统的整体运行效率也就越高[8]。然而,从系统安全的角度,较大的GEBR取值通常对应较小的安全防护裕度。若实际运营中系统预设GEBR值未能得到有效保障,导致设定值与实际制动率存在偏差,则可能引发安全风险[9]。
1.3黏着制动机理
GEBR参数的设定与有效性保障机制与列车轮轨间的黏着制动机理密切相关。当前城市轨道交通列车紧急制动力的主要来源是闸瓦制动系统,其作用过程如图2所示。
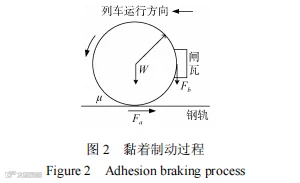
制动缸内气压通过基础刹车装置的传递与放大作用施加于闸瓦,使闸瓦对车轮踏面产生法向压力,进而形成制动力Fb。当轮对在钢轨上滚动时,接触区域会发生微小弹性形变,由此产生的瞬时黏着力记为Fa。在列车正常制动过程中,Fa与Fb之间的关系始终满足Fba≤FW= m(1)式中,μ表示轮轨间黏着系数;W表示车辆载荷。Fa与Fb之间的动态平衡不仅为GEBR参数设定提供了理论依据,同时也是ATC系统超速防护功能正常作用的必要条件。
2ATC系统超速防护功能失效分析
2.1GEBR值设定模式
在城市轨道交通工程实践中,GEBR设定值的确定主要基于车辆及制动系统供应商提供的理论计算结果。该计算过程需要精确评估轮轨界面的最小黏着系数,并重点考察列车在满载工况下,单个车辆动力单元(包含两个动力转向架)发生制动力失效的极端运行条件[10]。以某地铁项目为例,其GEBR值的理论计算结果[5]如表1所示。
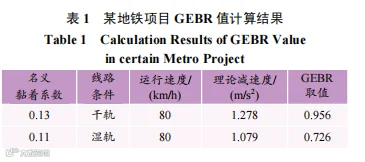
该计算结果需经过车辆制造商、信号集成供应商以及运营业主的三方联合技术评审,并签署正式协议后,方可确定为ATC系统的GEBR设定值。需要强调的是,该设定值一旦通过技术确认,为确保系统运行的稳定性和安全性,原则上禁止进行任何后续修改。
2.2超速防护失效机理
基于黏着制动机理与GEBR值设定模式的理论分析表明,黏着系数作为车辆制动系统设计的关键参数,其名义值不仅直接影响列车制动性能,更是确保ATC系统超速防护功能正常运行的理论基础。然而在实际运营中,城市轨道交通系统的轮轨黏着特性表征出显著随机性与离散性。研究表明,降雨、降雪、结冰等天气条件,以及轨面油污、落叶等污染物,均可能造成轨面状况劣化,导致轮轨黏着系数的显著降低[3]。当实际黏着系数低于ATC系统GEBR设定值对应的名义值时,列车将出现打滑现象,致使实际制动率无法满足预设GEBR的技术要求[1]。这种系统性偏差将导致列车实际制动距离超出SBM模型的理论计算结果和MA边界,最终可能引发系统超速防护功能失效,威胁列车行车安全。以2023年12月14日北京地铁昌平线列车追尾事故为例,事故发生时列车轮轨间的实际黏着系数仅为0.029~0.043,显著低于系统名义值0.14,导致列车的紧急制动平均减速度仅为0.46m/s2,未能达到系统预设GEBR值的技术要求[11]。类似事故案例还包括2014年2月15日日本东急东横线列车追尾事故[12],以及2016年11月22日南京地铁4号线的调试阶段冲标事故[2]。这些事故表明,在低黏着环境下,运行控制系统采用的静态GEBR参数难以实时匹配轮轨间黏着状态变化和车辆制动性能衰减,导致列车实际制动距离突破系统安全阈值。这一结果表明,既有超速防护策略在低黏着环境下的动态适应能力存在显著不足。
3ATC系统超速防护功能仿真分析
3.1模型构建
为了直观阐释ATC系统超速防护功能的作用过程及其失效机理,本文基于SBM理论框架构建了简化仿真模型。在系统运行过程中,需自动计算多条速度-目标距离模式曲线,其中EBD曲线是速度防护的核心基准,直接决定系统紧急制动(emergencybrake,EB)的触发逻辑。因此,本文选取EBD曲线作为系统超速防护功能的表征,构建融合轮轨动态黏着效应的ATC超速防护仿真模型。通过对比理论制动曲线与列车实际制动曲线,该模型可动态模拟低黏着环境下超速防护功能的失效过程,揭示制动效能衰减与安全防护阈值突破的内在关联。为降低计算复杂性,本文采用单质点模型描述列车动力学特性,忽略车辆编组间的耦合作用,同时假设列车运行于理想的平直露天轨道环境中,排除坡道、曲线和隧道等附加阻力的影响。基于此假设,列车运行阻力仅包含基本阻力分量。依据Davis公式,列车的阻力减速度af可表示为式中,α、β、γ表示与车辆相关的系数;ν表示列车的速度。本文将SBM中A阶段的起始时刻(即制动触发时刻)定义为零时刻,假定在SBM的B阶段,列车牵引力采用线性递减模式切除[13]。由此,列车的牵引加速度at可表示为
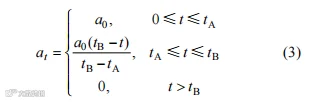
式中,a0表示列车零时刻的剩余加速度;t表示列车运行时间;tA表示SBM的A阶段结束时刻;tB表示SBM的B阶段结束时刻。如1.3节所述,黏着制动机理决定了列车最大制动减速度的上限,该上限取决于轮轨界面的黏着系数。故列车的最大制动减速度aEB可表示为

式中,aGEBR表示系统的GEBR设定值;a1表示列车的实际制动减速度;μ1表示轮轨间实际黏着系数;μ0表示系统GEBR设定值对应的名义黏着系数。在SBM的D阶段,制动缸压力通过渐进式提升来产生制动力。由于制动缸压力在10%~90%区间内呈线性梯度变化[5],故本文将制动力施加过程近似等效为等比例函数关系。由此,列车的制动减速度ab可表示为
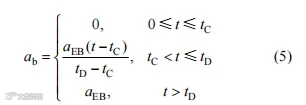
式中,tC表示SBM的C阶段结束时刻;tD表示SBM的D阶段结束时刻。综合式(2)~(5),列车在整个制动阶段的加速度a可表示为aaaa= t- -fb(6)由此,可推导获得EBD曲线,其表达式为
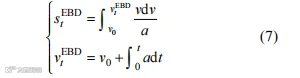
式中,stEBD表示EBD曲线上t时刻的里程分量;vtEBD表示EBD曲线上t时刻的速度分量;ν0表示零时刻ATP顶篷速度。同理可推导获得列车实际制动曲线,其表达式为
式中,stbrake表示实际制动曲线上t时刻的里程分量;brakevt表示实际制动曲线上t时刻的速度分量;v0¢ 表示零时刻列车的瞬时速度;νdiff表示零时刻列车瞬时速度与ATP顶篷速度之间的差值。当ATC系统的超速防护功能正常作用时,列车运行需同时满足两项约束条件:实时速度必须始终低于EBD曲线动态生成的速度限制;实际制动距离应控制在MA的安全允许范围内。这些约束条件可表达为
3.2仿真分析
基于MATLAB平台,参考某地铁项目车辆参数以及行业标准中对ATC系统的性能要求[14],本文通过ATC超速防护仿真模型,对北京地铁昌平线“12·14”列车追尾事故展开仿真分析,这起事故中ATC系统超速防护功能失效过程的仿真结果如图3所示。
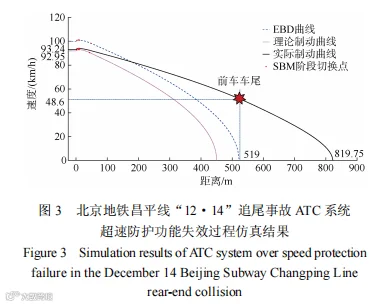
仿真结果显示,当ATP顶篷速度为100km/h时,系统推荐速度约为93km/h,此时列车的实时速度为93.24km/h,触发系统超速防护机制并开始EB。然而,受低黏着运行环境的影响,列车速度在SBM的D阶段逐渐偏离理论制动曲线,并于E阶段突破EBD曲线的速度防护阈值,最终以48.6km/h的速度与相距519m的前车发生追尾。经模拟,列车实际制动距离约为820m,较理论值偏差57.7%,这一结果印证了低黏着环境对列车制动性能的负面影响。值得注意的是,仿真结果与事故调查报告[11]的现场还原数据高度吻合,验证了ATC超速防护仿真模型的有效性。进一步分析仿真结果可知,ATC系统计算的理论制动距离主要取决于列车在SBM的E阶段的走行距离,其中GEBR设定值是该阶段的关键影响因素。值得注意的是,在低黏着环境下,列车实际速度与理论值的最大偏差也出现在E阶段。这一现象揭示了低黏着环境下列车制动性能的非线性衰减特征,凸显了建立GEBR值动态调整机制的必要性。上述仿真结果证实了轮轨间黏着条件对ATC系统超速防护功能正常作用具有关键性影响。针对低黏着环境下列车运行安全的有效保障,除了改善轮轨黏着物理条件外,还应优化超速防护控制算法。具体而言,可通过构建GEBR参数与ATP顶篷速度的动态匹配模型,实现复杂工况下的系统性能最优化。
4ATC系统超速防护控制策略优化
4.1现有控制策略局限性分析
在城市轨道交通系统中,雨雪天气下的露天线路段是典型的低黏着运行场景。为保障列车在此类工况下的安全运行,现行ATC系统普遍配置了针对性的运行模式(本文统称为“雨雪模式”)。该模式采用湿轨条件下的GEBR设定值,并辅以预设运行参数阈值(如ATP顶篷速度、最大牵引功率、最大制动功率等),以期降低超速防护功能的失效概率[10]。然而,既有控制策略在工程实践中存在3个突出问题:1)GEBR参数动态适应性不足。当前系统多采用单一的GEBR预设值表征低黏着工况,未能充分考虑环境变量对轮轨黏着系数与实际紧急制动率的动态影响[10]。这种刚性参数设定方式与低黏着环境下黏着系数的随机波动特性存在失配,导致系统安全防护裕量难以匹配列车实际运行需求。2)限速控制精度欠缺。现有限速策略多采用固定梯度调整模式(如全线统一限速至60km/h),缺乏针对局部黏着突变区域的动态响应机制[15]。此类粗放式控制策略不仅会显著降低系统整体运营效率,更无法有效应对突发性黏着劣化场景(如轨面结冰区段),容易形成潜在的安全隐患。3)控制链路协同性缺失。现有优化策略局限于系统运行参数的局部调整,未能建立“环境感知(黏着系数预估)→安全决策(动态GEBR值计算)→指令执行(ATP参数调整)”的全链路协同机制,制约了系统安全与效率的全局优化。上述局限性表明,现有策略难以实现低黏着环境下安全与效率的协同优化。因此,亟需构建动态黏着自适应控制机制:通过建立GEBR值与ATP顶篷速度的多模态匹配关系,实现二者的动态协同调控,从而提升ATC超速防护策略对低黏着环境的适应能力。
4.2控制策略优化
基于构建的ATC超速防护仿真模型,本文将运用多目标优化理论,构建兼顾安全性与运行效率的超速防护协同控制模型。该模型以GEBR值和ATP顶篷速度为决策变量,针对不同等级的低黏着环境,确定二者之间的最优匹配关系。
4.2.1模型目标函数
城市轨道交通系统的整体运行效率与列车平均旅行速度呈正相关,而后者直接受ATP顶篷速度设定值的影响。为最大化系统运行效率,应在满足列车运行安全约束条件的前提下,尽可能提高ATP顶篷速度设定值。因此,优化目标Z的表达式为

式中,θ为调整系数;vmax表示ATP顶篷速度。
4.2.2模型约束条件
1)制动距离约束。为保障列车的运行安全,系统追踪目标点需维持不变,等效于列车的总制动距离保持不变,即

式中,SEBDm1表示预期黏着系数μ1条件下的制动距离;SEBDm0表示名义黏着系数μ0条件下的制动距离。2)GEBR值约束。在低黏着环境下,GEBR值与黏着系数之间可近似为线性关系[16]。根据该理论关系,为确保列车的运行安全,动态调整后的GEBR值不得超过系统预设湿轨GEBR值经黏着系数折算后所得的结果,即
式中,a′GEBR表示动态调整后的GEBR值;aGEBR表示系统预设湿轨GEBR值。
4.2.3模型求解与分析
既有研究表明,在湿滑轨面工况下,我国轨道交通车辆的轮轨界面黏着系数典型范围为0.06~0.08[16]。基于此研究基础,本文以表1所示ATC系统作为研究对象,对超速防护控制策略进行优化改进。具体而言,选取0.08、0.07、0.06这3个梯度的黏着系数作为低黏着环境的分级量化指标,依据式(10)~(12)构建双目标多约束优化模型,以ATP顶篷速度(表征运行效率)的最大化为优化目标,采用遗传算法对GEBR值(表征系统安全裕度)进行全局参数寻优,确定ATP顶篷速度-GEBR值的最优匹配关系。求解所得的最优匹配结果如表2所示,系统速度防护曲线的动态演化过程如图4所示。
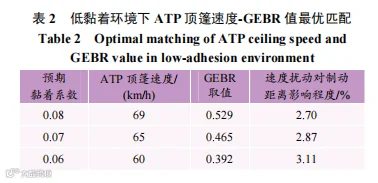
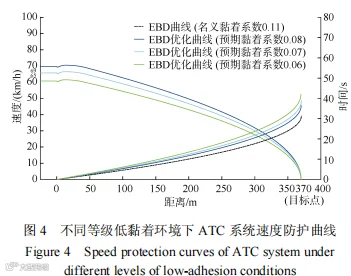
由表2和图4的仿真结果可知,本文构建的超速防护协同控制模型在维持系统追踪目标点(制动距离370m)恒定的条件下,通过“感知-决策-控制”的闭环控制链路,确定了不同预期黏着系数下ATP顶篷速度-GEBR值的最优匹配关系,并在此基础上自动生成对应的速度防护曲线,实现了不同等级低黏着环境下安全-效率的帕累托均衡。对比表1的速度防护策略,表2对应的新型控制模型将ATP顶篷速度的控制精度提升至±1km/h,将GEBR值的调节精度优化至0.001m/s2。相较于传统策略的±10km/h的限速控制精度和固定GEBR参数,该优化方案有效解决了既有系统存在的GEBR参数僵化与限速精度缺乏这两大工程问题,从而能有效降低因参数失配而引发的安全事故风险。进一步分析表2可知,随着预期黏着系数的降低,列车制动时长与速度扰动敏感性同步增加。具体而言,1km/h的速度波动对制动距离的影响程度会随着黏着系数下降呈放大趋势。这一现象的成因在于轨面黏着条件劣化会降低轮轨系统的最大可用制动力。当黏着系数低于0.05时,考虑到速度扰动的影响,本文提出的优化控制模型将不再适用,此时ATC系统应切换至保守控制模式。例如,在极低黏着环境下为防范列车打滑风险,系统可通过引入滑移补偿机制来动态调整安全裕度[17]。
5结论
本文基于对ATC系统超速防护功能作用过程的分析,聚焦低黏着环境下超速防护功能的失效机理及控制策略优化开展研究,得出以下结论:
1)低黏着环境下ATC系统超速防护功能的失效路径遵循“黏着衰减→制动效能下降→GEBR设定值动态失配→制动距离突破安全阈值”的链式传播机制,其根源在于工程实践中GEBR值刚性设定模式与实际运营中黏着系数随机波动特性之间的失配矛盾。
2)提出的“感知-决策-控制”一体化的超速防护优化控制策略,通过GEBR参数和ATP顶篷速度的多目标协同控制,实现动态精细化调整,有效平衡了低黏着环境下列车制动安全性与运行效率的优化需求。
消息由中国城市轨道交通网CCRM整理编辑,文章来自都市快轨交通,涉及版权请联系删除,如有转载请标明出处)