本文发布已获得《都市快轨交通》授权
原文发表于《都市快轨交通》
2025年 第6期
如有转载请联系版权方,标明出处
张慧怡,周侃,王波,赖华辉
BIM+GIS技术通过构建精确的三维模型和地理空间信息,显著提升了项目设计、建造、运营和维护的效率和准确性[1]。利用三维场景开展项目设计方案评审、项目进度管理、风险预警等应用越来越普遍。为增强参建方对设计方案的理解[2],三维场景漫游已成为重要的辅助工具,广泛应用于工程设计展示、地质风险评估、项目推广与宣传以及决策支持等方面。通过三维漫游,用户可以自由浏览场景中的任意区域。然而,传统漫游方法多依赖视频渲染、VR/AR设备、预设路径或键盘鼠标操作,存在交互灵活性差、操作烦琐、变更困难等问题。因此,为了充分发挥BIM+GIS技术在轨道交通工程的应用价值,解决项目三维漫游制作效率低、人机交互复杂等问题[2],提高项目质量和生产效率,自适应漫游逐渐成为BIM+GIS技术应用的热点问题。国内外研究学者对自适应漫游技术进行了一定的研究和探索。CHEN等结合A*算法、Dijkstra算法及动态规划算法改进路径规划,综合考虑转角、环境复杂性等因素,提升路径规划的效率和实用性[3]。林晓玲构建了路径适应度函数模型,并提出BF0-ACO算法,解决多约束虚拟漫游环境中的寻路问题[4]。范志伟提出了一种基于数字孪生的快速三维建模方法,实现园区高精度模型构建及GIS融合,完成了虚实世界坐标统一[5]。张正等利用CesiumJS引擎,通过优化漫游路径设置、运动控制和碰撞检测等关键技术,实现了多模式可配置的城市漫游功能[6]。袁占全等采用Unity加载GIS多源数据技术,开发了漫游系统,为BIM技术在航道工程中的推广应用提供了重要价值[7]。樊文平等以实景三维模型为基础,结合人机交互及控件脚本,构建实现了碰撞检测的虚拟校园自主漫游系统[8]。胡娟构建了三维可视化信息系统,提出了三维场景实时渲染与数据动态更新的优化机制,保证了系统的实时性[9]。综上,三维场景中漫游应用已经较为广泛,但关于自适应漫游的解决方案较少,而对于轨道交通工程中大规模BIM+GIS三维场景,有独特的漫游要求和多源数据融合的特点。本文针对轨道交通工程场景大、集成数据多等特点,搭建三维场景并设计实现一种基于BIM+GIS技术自适应城市轨道交通工程复杂场景的漫游方法。
1三维自适应漫游重难点分析
轨道交通工程方案讨论或工程建设过程中需要融合多种数据,尤其是线性工程这种大场景,包括模型数据、线路数据、底图数据、轨道线路坐标、风险源、盾构、工作井和地质信息等。对整体数据的集成、转换、呈现,在自适应漫游场景中正确快速地加载、实时渲染尤为重要。传统线路漫游过程中存在操作复杂、参数设置烦琐等问题。路径通常依赖插值算法生成,转角较大,镜头过渡不够平滑,尤其在地形复杂或特定区域易出现镜头脱离场景的情况,严重影响用户的交互体验。要将用户从盲目的交互过程中解放出来,需要分析场景信息,考虑轨道线路的复杂性和曲线的变化,计算出合适的漫游路径,以实现平滑、连贯、稳定的漫游体验。自适应漫游具有实时性和交互性。在自适应漫游运行时自动捕捉漫游兴趣点,并实时加载和展示相关建设信息,同时支持用户的交互操作。需要处理实时数据传输、动态信息加载和用户交互的复杂性,以提供流畅、灵活的漫游体验。
2三维自适应漫游技术研究
基于以上分析,本文设计了一种三维自适应漫游技术。首先构建1个融合多源轨道交通工程数据的三维场景作为底座,通过读取、计算、识别漫游兴趣点,得出一条满足漫游需要的线路。同时为了保障在漫游运行时镜头的平稳、合理及漫游进度实时判断,结合路径,兴趣点对漫游过程中的相机姿态进行控制。最后,将三维场景漫游与轨道交通工程的沿线地质模型进行同步处理,实现地质数据同步漫游。
2.1三维场景搭建
轨道交通工程生命周期中有大量的多源异构数据,集成了数据的三维场景,这是自适应漫游的基础,也是用户的重点关注对象。其主要技术路线如图1所示。
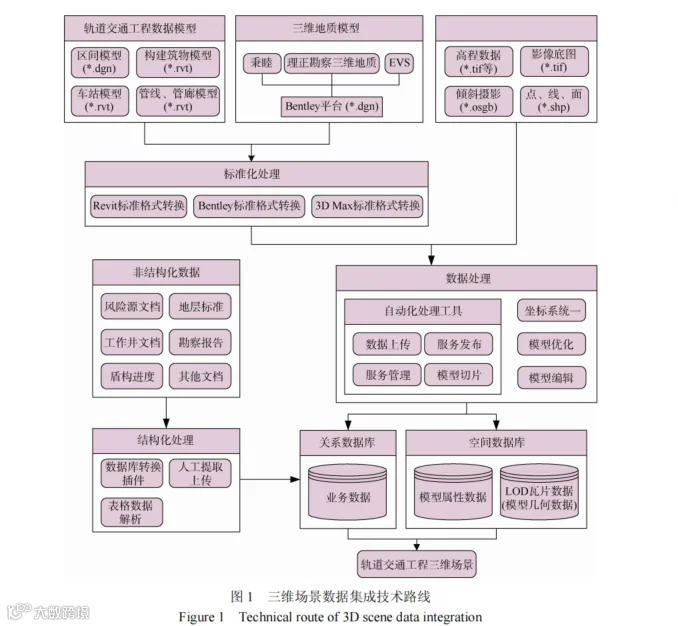
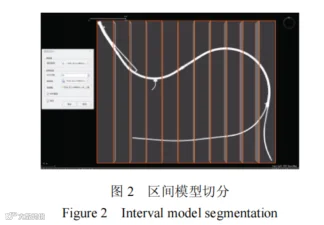
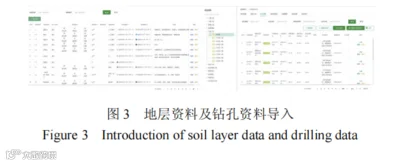
结构化数据主要为BIM模型数据及环境GIS数据。BIM生产软件众多,所以BIM模型格式众多。S3M是一种面向海量异构三维地理空间数据集的开放标准,支持多种用途的数据类型,并具备分层细节级别(LOD)能力,因此满足三维场景对数据融合及漫游效率的要求[10]。通过格式转换插件,将多源BIM模型进行标准化处理,转换为S3M格式。其次,模型的质量也直接影响到漫游场景的流畅性,模型优化主要依据不同模型的特征,并结合具体应用场景的业务需求,采取合并、拆分、简化以及生成多层次细节(LOD)等方式进行处理,以提升渲染效率。以轨交区间模型为例,区间模型通常为带状,主要包含轨道模型、机电设备模型、盾构管片模型等。对轨道模型中包含大量相同对象(如钢轨扣件、轨枕等)进行实例化存储,即只保存一份模型几何对象,可以大大减少渲染压力。如图2所示,对于跨度大的带状管片、机电管线等模型,在场景视野中通常不需要全部展示,所以需要把距离跨度大的模型切分为多个对象,方便场景根据视野范围动态调度显示模型对象,减轻场景渲染压力。非结构化数据主要包括风险源文档、地层标准、工作井文档、勘察报告等,需要针对数据特征,开发对应处理工具进行自动化处理,或通过人工录入方式,转化为结构化数据入库存储。例如,地质信息主要有勘察活动中产生的钻孔、地层信息、岩芯照片等文档类信息,这类信息要先规范文档格式,再通过开发导入工具解析文档对应信息,实现结构化处理后入库,同时也减少人工录入的工作量。地层及钻孔资料导入如图3所示。
2.2自动生成漫游路径
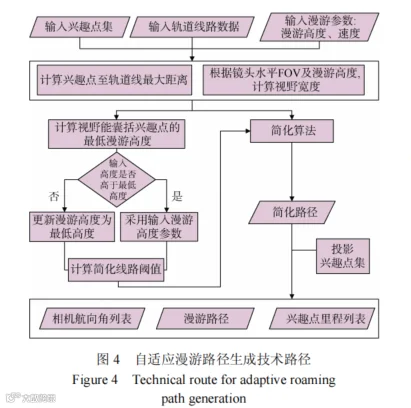
轨道交通工程的场景漫游需保证镜头能捕捉到漫游过程中所关注的风险源、盾构、模型等信息,这些信息主要分布在沿线范围。以线路中线为基础,计算漫游路径则可以最大化地满足需求。原始线路数据来源于规划设计,为精细平滑的折线,在大场景漫游的过程中,只需保证线路走势在镜头中央,不需要原始线路设计细节,例如对于较缓的弯道则只需要直线飞过,并能观察捕捉到线路周边的兴趣点即可。自适应漫游路径生成技术路径如图4所示。
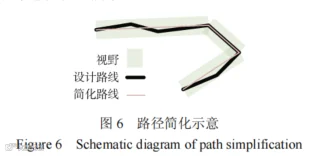
为保证兴趣点能在漫游视野中展现,漫游路径为视角中线,计算出兴趣点到路径中线的垂直平面距离,与视野宽度做比对,如距离大于视野宽度,则可认为兴趣点超出视野范围,需要增加视野范围,如图5所示。
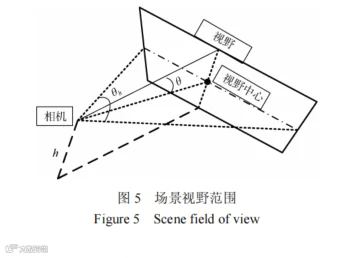
视野宽度的计算则需要采用相机视场角(fieldofview,FOV)参数,FOV是一种表示视角范围的测量单位,是显示器边缘与相机连线的夹角。取相机中心视点射线与地平面交点处作为视野中心,可得视野宽度计算式为:
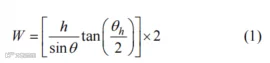
式中,W为视野宽度;h为相机高度;θ为俯仰角,俯瞰时取值为é ê ë 0,p 2ù ú û ;θh为水平视场角。可知视野范围与h、θh成正比,与θ成反比。调整θ会影响图像宽/高比,从而产生变形;减小θ则代表“远眺”,并不适合漫游的视角,因此采用修改相机高度调整视野范围,达到最佳效果。将兴趣点集至线路的最大距离作为最小视野宽度,依据式(1)可以反算出最低漫游高度,即只要漫游高度大于此值,视野可包括所有沿线兴趣点。相机高度越高视野越宽广,漫游时镜头需要更平稳,需要转向的阈值越低,因此漫游路径需要依据设计线路中线进行简化。本文路线简化采用道格拉斯-普克算法,该算法通过设定1个阈值控制简化后的曲线精度,同时具有平移和旋转不变性,效率高、化简效果好,其以整条曲线进行抽稀,降低要素复杂度。简化示意如图6所示。由图6可以看出,依据不同的视野宽度给出不同的阈值参数,使得对应相机高度线路简化程度满足漫游需要——线路在视野中央且镜头平稳。通过以上方法,可以实现根据漫游线路相关数据,自动计算出符合漫游要求的精简路线,再结合漫游高度则可得到最终的镜头漫游路径,同时生成漫游过程中需要用于控制姿态和进度的中间参数。
2.3相机运动与姿态控制
相机的运动需要根据速度、帧率等参数计算每一帧相机的位置,同时结合姿态参数完成相机运动与姿态控制。相机位置可以根据用户设置的速度和漫游时间推算出当前里程信息,再根据里程信息获取路径上对应的坐标。里程的计算方法为

式中,M为里程;S为漫游速度;T为时间;f为帧率。根据漫游里程信息获取对应路径上的坐标,可通过以下方式计算:①计算线段的累积长度,根据运行时的里程值,找到目标点所在的线段;②计算当前线段与里程之间的长度比例,进行插值计算获得目标点在线段上的坐标位置。确定相机位置后还需要根据漫游需要自动调整相机姿态,保证漫游效果。镜头姿态通常采用航向角、俯仰角、横滚角几个参数控制,通常俯仰角与横滚角为固定值即可满足漫游要求,而航向角则需要根据项目信息实时计算。简化过后的漫游路径为多线段,节点处不平滑,漫游运行经过路径节点时,由于相机航向角突变导致镜头突变,进而影响整体视觉效果。通过引入转向时间参数(ttotal),计算出每一帧需要转向的角度(Δθ),实现漫游经过节点时在一定的时间内平滑的转向。计算式如下:

由式(3)可知,时间越长转向速度越慢,依据定义的转向时间参数以及路径上每个节点需要转向的角度θ,结合f计算出每一帧需要转向的角度Δθ大小,即可在需要转向时实现平滑稳定的视觉效果。
2.4漫游兴趣点捕捉
自适应漫游过程中,系统需能自动识别当前经过的兴趣点,并实时展示相关工程信息。由于兴趣点分布具有一定随机性,需结合相机视角与兴趣点的空间相对位置,动态判断应展示的信息内容。因此,本文将兴趣点垂直投影到漫游路线上,形成兴趣点的里程列表,以漫游的里程进度辅助判断是否到达当前兴趣点,以消除其空间位置的随机性,如图7所示。
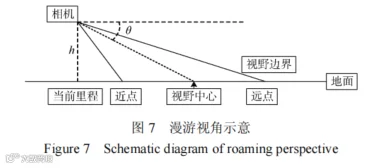
由图7可知,相机在漫游运行时视野宽广,远处未漫游到的点位可能在视野中出现但并不是当前视野的重点。相机视角为俯瞰,则当相机与兴趣点里程完全相等时实际兴趣点已退出视角。符合观感的兴趣点漫游范围应当是从视野中心至消失在视野近点。因此,兴趣点的里程并不能直接用于判定捕捉漫游兴趣点,需要依据相机姿态,保证兴趣点在视野中心时触发对应信息、模型展示,离开视野时或者进入新的兴趣点时清除当前信息,以保证漫游效率。通过将兴趣点里程数与相机姿态参数结合计算,推导出视野中心对应的里程值,以此作为兴趣点到达的判定依据。计算式为:

式中,Marrived为到达捕捉里程;Mpoi为兴趣点里程。将漫游运行时的当前里程Mruntime与计算结果相比对,当Marrived–Mruntime=0时,即可以精准地判断捕捉并激活当前兴趣点,并播报或展示对应的信息。
2.5地质同步漫游
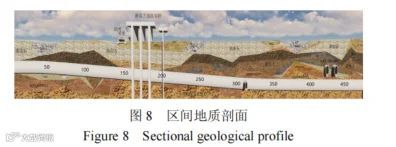
漫游过程中同步对比展示当前盾构区间地质,可以直观发现盾构区间所经过的地层状况,以及其他地物的空间关系。区间模型通常在地质模型的内部,且在地形底图之下。为了避免运行时对模型进行剖面计算影响漫游流畅性,因此采用多工点位图拼接的方式,进行同步漫游。地质体纵剖图件是以盾构区间中心线为纵剖线,多个工点纵剖图件拼接而成的超长位图图像,如图8所示。
漫游过程基于真实地理坐标的三维场景,为达到同步效果,需要将位图坐标与地理坐标进行配准。位图与地理坐标配准首先需要获得不同单位下的对应控制点坐标。轨道线路站点地理坐标已知,因此只需位图采用“一站一区间”的形式切分,即可使用站点作为控制点进行配准,如图9所示。标记位图上的各个站点像素横坐标位置,根据每一区间的像素数映射至漫游线路里程进度,即计算出位图每个区间内1个像素对应的实际长度。漫游运行时通过计算里程即可与位图保持同步。像素与线路里程映射式如下。
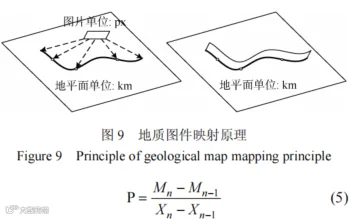
式中,Xn为对应站点像素点横坐标;Mn为站点里程值。从而得出每个区间的位图像素尺寸对应的物理尺寸P。
3轨道交通工程三维自适应漫游实践
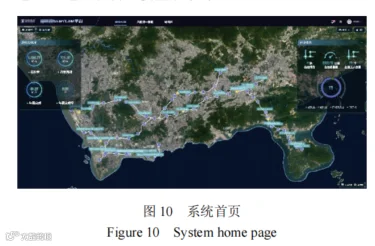
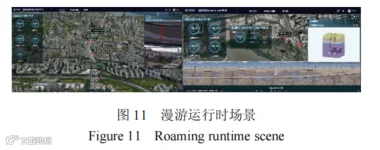
本文以深圳1条国家铁路和5条城际铁路为数据基础,构建轨道交通BIM+GIS漫游系统。系统首页示意如图10所示。该系统通过轨道交通工程多源异构数据融合技术,搭建三维地理场景,自动检测兴趣点,实现轨道交通线路自适应漫游,实时获取并展示相应信息。将区间、地质、工点等模型数据,进行坐标统一、数据转换、轻量化等方法集成至三维场景中,用户选中某条线路后,通过分析录入的工点、盾构、区间、风险源等兴趣点信息,即可开始当前线路的自适应漫游进程。漫游运行时支持速度调整、语音播报信息、兴趣点跳转、模型展示等。息,漫游系统将根据工程信息自动规划漫游策略,满足实际应用,大大减少了更新漫游效果的人工重复操作。通过三维自适应漫游,能够清晰、流畅地查看轨道交通工程沿线地上地下的关键要素,漫游场景如图11所示。
4结论
1)基于BIM与GIS融合的三维地理场景,结合轨道交通工程特点,设计并实现了一种能够自动识别路径、控制相机姿态、捕捉兴趣点及同步展示地质信息的自适应漫游算法,提升了三维场景交互的智能化水平。2)通过统一坐标系统、数据格式转换及模型轻量化等手段,将区间模型、地质信息、风险源等多类数据有效整合至三维地理场景中。兴趣点可自动识别并实时播报相关信息,显著提高了工程信息展示的效率与准确性。3)验证了在实际项目中的运行效果。能够在数据更新后自动适配漫游策略。该方法提升了三维漫游制作效率和交互体验,具备良好的可扩展性与工程应用前景。
消息由中国城市轨道交通网CCRM整理编辑,文章来自都市快轨交通,涉及版权请联系删除,如有转载请标明出处)