本文发布已获得《都市快轨交通》授权
原文发表于《都市快轨交通》
2025年 第5期
如有转载请联系版权方,标明出处
戴晓超1,胡杰2,荆宇航3
在列车服役过程中,构架端部悬挂部件的疲劳失效问题尤为突出,影响列车安全。这些部件,如天线梁、轨道检测装置和排障器,通过螺栓连接固定在构架端部,承受着来自构架端部的载荷激励[1]。在恶劣的振动环境下,疲劳失效问题频发,严重威胁了列车的行车安全。蔡川东等[2]通过动力学仿真分析了天线梁的高频振动疲劳问题,并提出解决方案。李相杰等[3]对障碍物检测装置进行了子模型剖分和寿命预测,评估了影响因素并提出设计建议。王文静等[4]发现构架端部到撒砂装置的响应存在放大现象,强调评估时需考虑模态影响和线路条件。LIU等[5]确定了排障器疲劳失效的主要因素,通过结构优化提高了模态固有频率。
WEI等[6]研究了排障器在轨道波磨下的高频振动和应力。尽管上述研究在特定部件(如排障器)的失效机理和局部优化方面取得了进展,但对于构架端部各类悬挂部件(如轨道检测装置、天线梁等)在复杂服役环境下的疲劳应力进行实时、间接监测,仍缺乏高效、普适性的解决方案。近年来,深度学习基于其强大的特征提取能力和处理复杂数据的优势,被广泛应用于轨道交通安全监控、智能调度、故障预测等领域。因此,本文针对轨道交通车辆构架端部悬挂部件的疲劳损伤监测难题,提出了一种基于深度学习方法的间接应力监测方案。该方案的核心在于通过建立循环神经网络(recurrentneuralnetwork,RNN)、长短时记忆网络(longshort-termmemory,LSTM)和时序卷积神经网络(temporalconvolutionalnetwork,TCN)3种时序回归模型,直接学习构架端部易测的振动加速度载荷与难以直接监测的部件关键点应力之间的端到端映射关系。经过试验对比,3种神经网络模型对于应力预测任务均取得了不错的预测效果,为列车安全维护提供了有效指导。
1时间序列回归模型构建
疲劳应力响应间接监测的关键是如何建立输入载荷和输出应力响应之间的映射关系,该问题本质上是时间序列回归预测问题。本文采用RNN、LSTM和TCN这3种主流时序回归神经网络[7]作为输入载荷和输出应力响应之间的映射。
1.1RNN
RNN是专门设计来处理序列数据的神经网络架构[8],如图1所示,x、s和o分别为输入层节点、隐藏层节点和输出层节点;U、W和V分别为输入权重、循环权重和输出权重。RNN通过多个时间步骤进行计算,每个步骤接收1个输入向量并结合前1个时间步的隐藏状态来更新当前的隐藏状态。常见的非线性激活函数主要包括tanh、relu、sigmoid和softmax,如图2所示,tanh的具体表达式:

式中,e为自然对数。
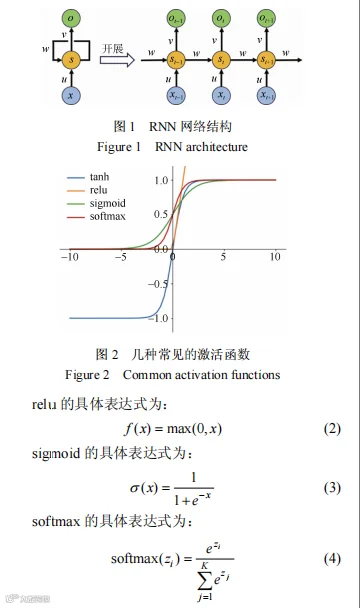
式中,zi为第i个类别对应的输入值;K为类别总数。RNN在每个时间步重复这一过程,并可选择性地生成输出。通过反向传播算法和梯度下降,网络参数得以更新,以最小化损失函数。这种计算过程使得RNN能够在时间步之间传递隐藏状态,对序列数据进行建模和预测。通过这样的计算过程,RNN能够在时间步之间传递隐藏状态,从而对序列数据进行建模和预测。然而,RNN也面临着在处理长序列数据时可能会遇到梯度消失或梯度爆炸的问题。RNN神经网络的计算过程如式(5)和式(6)表示。
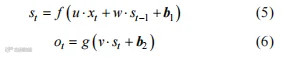
式中,xi是输入层的输入;st是隐藏层的输出;ot是输出层的输出;f是隐藏层激活函数;g是输出层激活函数,可以是softmax函数。b1和b2分别是隐藏层的和输出层的偏置向量。
1.2LSTM
LSTM是一种循环神经网络的改进架构,由Schmidhuber于1997年首次提出,为克服传统RNN中固有的梯度消失问题而设计。当梯度在RNN中随时间反向传播时呈指数减小时,就会出现梯度消失问题,从而使网络难以学习长程依赖关系。如图3所示,图中fi、it、C% t、ot和ht分别为遗忘门、输入门、神经元状态、输出门和输出,遗忘门fi的计算式为: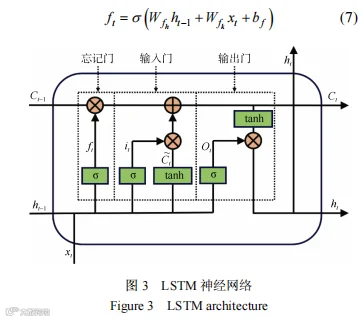 输入门it和神经元状态C% t的计算式为:
输入门it和神经元状态C% t的计算式为:

式中,Wih为输入门的权重矩阵;ht–1为前一个时间步的隐藏状态;Wix为输入门的权重矩阵,用于连接当前时间步的输入量xt;bi为输入门的偏置向量;WCh为神经元状态的权重矩阵;WCx为神经元状态的权重矩阵,用于连接当前时间步的输入量xt;bC为神经元状态的偏置向量。细胞状态Ct、输出门ot和输出ht的计算式为:
式中,xt为输入序列;W为权重矩阵;b为偏置向量;Woh为输出门的权重矩阵;Wox为输出门的权重矩阵,用于连接当前输入xt;bo为输出门的偏置向量;σ(·)为sigmoid激活函数;tanh(·)为双曲正切激活函数。这些门控单元能够选择性地控制信息的流动和记忆的更新[9]。每个时间步,依据前一状态和当前输入计算新记忆,并由遗忘门决定是否保留旧记忆,输入门负责更新记忆,输出由激活函数如sigmoid函数和tanh函数计算得出。最终,LSTM通过在每个时间步重复计算过程来捕捉序列中的长期依赖,有效处理序列数据并维持信息传递和记忆。
1.3TCN
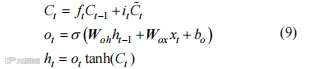
TCN主要应用于计算机视觉领域,由于RNN网络1次只能读取解析1个时刻的信息,即RNN不能像卷积神经网络那样进行大规模并行处理,否则会导致耗时严重。TCN是BAI等[10]提出的卷积神经网络,该网络模型的设计结合了空洞卷积、因果卷积和残差连接。TCN神经网络依靠空洞卷积和残差块增加网络的感受野以获取更多历史信息。图4(a)展示了卷积核大小为k=2,膨胀系数d=[1,2,4,8]时的空洞因果卷积的卷积过程。空洞卷积操作F与输入序列位置s的卷积结果定义如式(10)所示:

式中,x为序列数据;f为卷积核;d为空洞大小;k为卷积核大小;xs-di为序列数据x在s–di位置的值。然而,随着卷积网络层数的提高,会引起梯度爆炸和梯度消失的问题。为了解决这些问题,在TCN中增加了残差层模块,通过残差模块的堆叠加深网络深度,残差模块的结构示意如图4(b)所示。
2数据采集
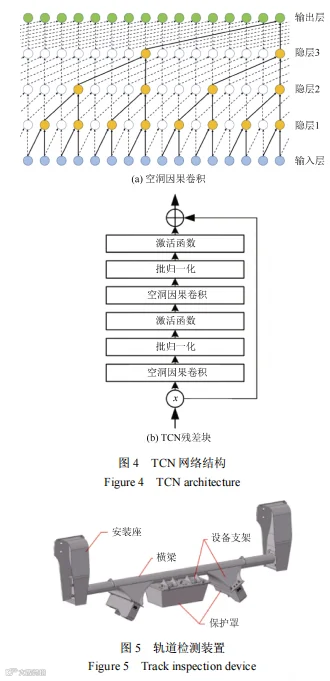
本文以轨道检测装置为例,对其结构疲劳损伤进行监测,该悬挂装置的结构如图5所示。
2.1悬挂部件危险点位置识别
疲劳应力检测的位置为结构疲劳寿命较低点,为确定结构危险位置,本文以IEC61373规定的5h长寿命测试加速度功率谱,对轨道检测装置分别进行随机振动疲劳评估。通过ABAQUS有限元分析软件计算构架端部悬挂装置的疲劳寿命,因为结构不同,区域安全系系数差异较大,定义安全系数阈值为2。
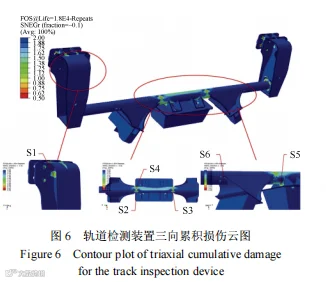
图6为轨道检测装置的三向累积疲劳损伤云图,可以看出,轨道检测装置的危险点主要集中在横梁与设备安装座的连接部位以及悬臂焊缝处。
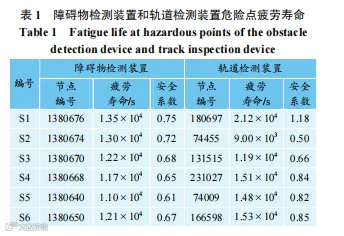
表1具体展示了2个装置危险点的疲劳寿命情况。从表中可以看出:障碍物检测装置6个危险点安全系数均小于1,最小值为0.61,未能满足IEC61373的设计要求,轨道检测装置6个危险点安全系数最小值为0.50,同样未能满足IEC61373的设计要求。根据上述分析结果,本文将按照上述位置分别针对轨道检测装置布置应变传感器。
2.2线路试验
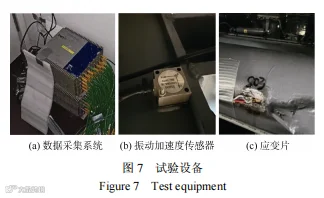
障碍物检测装置和轨道检测装置采用不同线路进行数据采集,障碍物检测装置的试验线路为A线,途径34座车站,往返里程共计约92km;轨道检测装置的试验线路为B线,途径31座车站,往返里程共计约84km。试验采用加速度计监测的结构振动加速度响应信息,应力采用120Ω电阻式应变计测量。通过数采系统进行数据采集时,通道间采样严格同步,振动加速度和动应力信号采样频率为2000Hz,试验设备的安装方式和测点位置如图7所示。
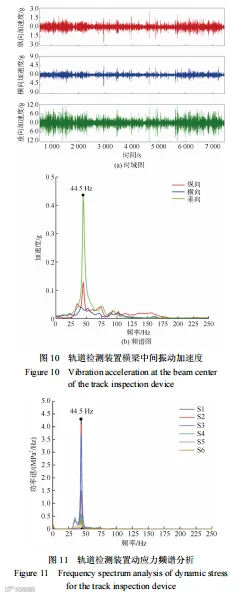
轨道物检测装置构架端部、横梁端部和横梁中间的振动加速度采集数据如图8(a)、9(a)和10(a)所示,对振动加速度信号进行频谱分析,结果如图8(b)、9(b)和10(b),可以看出,3个测点的3向振动加速度的能量主要集中在150Hz以下。
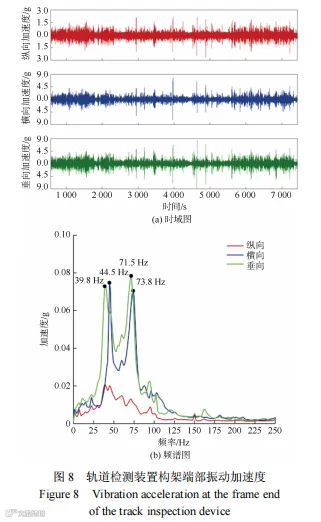
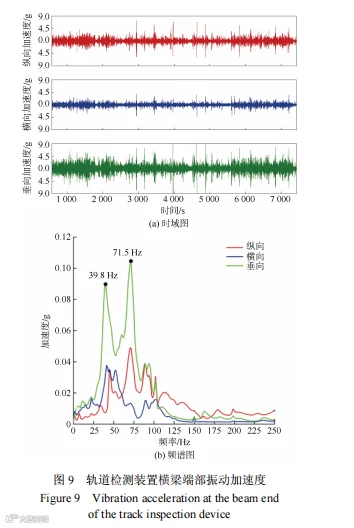
构架端部的横向和垂向振动加速度具有明显的主频,且变化趋势相似。横向加速度的主要频率峰值位于44.5和71.5Hz,而垂向加速度的主要频率峰值位于39.8和73.8Hz。相比之下,纵向加速度的频带较窄,没有显著的峰值。横梁端部的垂向振动加速度表现出明显的峰值,而纵向和横向振动加速度的频带较宽。横梁端部的垂向振动加速度主频与构架端部几乎相同,为39.8和71.5Hz。横梁中间部位的振动加速度能量峰值较为集中,垂向振动加速度的主频为44.5Hz,其峰值明显高于其他方向,显示出横梁中间部位的垂向振动特别剧烈。值得注意的是,构架端部和横梁端部在44.5Hz频率下的垂向振动加速度并未表现出明显的峰值,而横梁中间部位在该频率下却有异常强烈的响应峰值,且该频率成为整个频带中的主要成分。对比轨道检测装置的模态频率和振型可以发现,横梁在该频率附近存在1阶垂弯的模态振型。因此,说明轨道检测装置在服役过程中横梁的一阶垂弯模态被激发,发生了结构共振,导致横梁在44.5Hz左右振动被显著放大。图11为轨道检测装置动应力频谱分析,可以看出轨道检测装置的6个测点的主频均集中在44.5Hz附近。
3算例分析
通过具体的算例分析,验证所提出的基于深度学习的构架端部加速度载荷与应力之间映射关系的有效性。
3.1评估标准与数据集构建
为了评估模型的拟合效果,建立了包含平均绝对误差(MAE)、均方根误差(RMSE)和决定系数(R2)的评价指标体系。MAE衡量模型预测精度,其值越小表示模型预测越准确;RMSE衡量模型稳定性,其值越小表示模型越稳定;R2衡量回归拟合效果,其值越接近1表示拟合效果越好。这些指标的具体计算式如下。
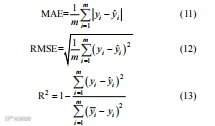
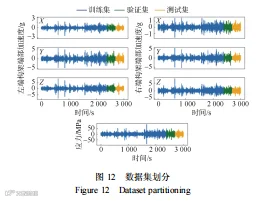
式中,yyii- ˆ为真实值和预测值之间的误差;yyii- 为均值和真实值之间的误差。构建应力响应预测系统数据集D={1x,1y,1z,2x,2y,2z,S},其中1x、1y、1z、2x、2y、2z分别代表左、右侧构架端部纵向、横向、垂向的振动加速度,S代表测点应力,所以整个系统可以看作为一个6输入1输出的系统。选取3000s数据进行分析,采样频率为500Hz,时间步长为0.002s,因此得到500×3000×7=10500000个数据。数据按照80%训练集,10%验证集,10%测试集的比例进行划分,应力响应预测系统数据集如图12所示,图中仅以S3测点应力作为示例。
原始数据集由振动加速度和应力两大类特征构成,共计7个特征值。本研究采纳滑动窗口机制,对时间序列数据进行处理,将其划分为一连串连续的子序列。具体流程参见图13。
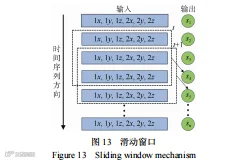
该机制通过滑动一个固定尺寸的窗口,沿着时间序列数据截取一连串的子序列。在窗口每次移动过程中,都会覆盖并捕捉序列中的新区域,从而产生大量重叠(或不重叠)的子序列。每个子序列的长度对应于单次输入的采样点数目。这一处理方法使得时间序列数据得以转化为用于应力时间序列预测的样本和标签。
3.2模型计算结果
3.2.1RNN计算结果
为确保模型参数不影响计算结果的准确性,本研究首先对各模型进行了参数优化,以比较在最优参数配置下各模型的性能表现。在RNN神经网络中,时间序列长度是一个关键的超参数。为了确定最佳的序列长度,本研究在保持其他神经网络参数不变的前提下,对100以内的不同序列长度进行了实验,步长间隔设置为10,共进行了10组对比实验。在这些实验中,隐层神经元的数量设定为64,且网络结构为单层RNN。图14(a)展示了在不同时间步长下RNN模型预测性能的统计结果。由图14可知,随着时间步长的增加,模型预测效果呈现波动变化。在序列长度为80时,模型在各项评价指标上均达到了最佳表现,此时的平均绝对误差(MAE)、均方根误差(RMSE)和决定系数(R2)分别为0.993、1.414和0.881。因此,对于RNN神经网络在应力预测任务中,将时间序列长度设定为80是较为适宜的选择。

图14(b)展示了在RNN神经网络的隐藏层中,不同神经元数量对模型性能指标MAE、RMSE和R2的影响。实验评估了神经元数量分别为25、50、75、100和125时的模型性能。结果显示,随着神经元数量的增加,模型的预测精度呈现出先增后减的趋势。具体来说,当神经元数量达到50时,模型的综合性能指标表现最为优异。进一步地,图14(c)探讨了网络层数对RNN网络模型性能的影响。在这些实验中,时间序列长度被设定为80,隐层神经元数量为50,分别对单层、双层、三层和四层RNN结构进行了实验。实验结果表明,增加网络层数并未显著提升模型的预测效果,反而过多的层数可能会导致模型预测精度下降。这表明在不增加网络层数的情况下,RNN模型已经能够实现良好的泛化性能。因此,对于RNN网络模型而言,选择单层结构更为合适。
3.2.2LSTM计算结果
LSTM是传统RNN网络的改进结构,引入了额外的门控单元以解决RNN在处理长序列数据时的梯度消失问题。这些门控单元使得LSTM在网络结构上与传统RNN相似,但在参数设计上有所区别。本研究对LSTM网络进行了详细的参数分析,包括序列长度、隐藏层神经元数量以及LSTM层数对模型性能的影响。在实验中,设定隐藏层神经元数量为64,并采用单层LSTM结构。图15(a)展示了不同时间步长对LSTM模型预测性能的影响,结果显示,随着时间序列长度的增加,模型的平均绝对误差(MAE)和均方根误差(RMSE)逐渐降低,而R2值逐渐升高。当时间序列长度超过70时,误差变化趋势趋于平缓。因此,对于LSTM神经网络在应力预测任务中,选择70作为时间步长是较为适宜的,此时模型的平均绝对误差(MAE)为0.980,均方根误差(RMSE)为1.346,R2为0.893。

图15(b)展示了在时间序列长度固定为70的情况下,不同神经元数量对LSTM模型性能的影响。结果表明,随着神经元数量的增加,模型的预测精度先提升后下降。当神经元数量为75时,模型展现出最佳综合性能,此时的平均绝对误差(MAE)为0.957,均方根误差(RMSE)为1.312,R2为0.898。最后,图15(c)展示了在时间序列长度为70、隐藏层神经元数量为75的条件下,不同层数LSTM模型的性能评估结果。结果显示,随着层数的增加,模型的预测精度先提升后下降。三层LSTM结构在综合性能上表现最佳,此时模型的平均绝对误差(MAE)为0.932,均方根误差(RMSE)为1.276,R2为0.904。
3.2.3TCN计算结果
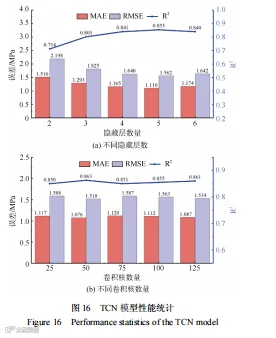
TCN作为一种卷积神经网络,其时间序列长度由网络的感受野决定,而感受野的大小受隐层数量影响。实验中固定卷积核数量为64,测试不同隐层数量(2至6层)的模型,结果如图16(a)所示。结果表明:随着隐层数量的增加,模型的预测精度先增大后减小;当隐层数量为5时,模型的综合性能指标最好,此时真实值的与预测值之间平均绝对误差(MAE)为1.110,均方根误差(RMSE)为1.562,R2为0.855。图16(b)进一步展示了在隐层数量为5的情况下,不同卷积核数量对TCN网络模型预测性能的影响。结果发现,卷积核数量对模型的预测精度影响不大。当卷积核数量设定为50时,模型的综合性能指标达到最佳,此时模型的平均绝对误差(MAE)为1.076,均方根误差(RMSE)为1.518,R2为0.863。综上所述,针对应力响应监测任务,TCN网络在隐层数为5、卷积核数量为50时表现出更为良好的预测效果。
3.2.4模型对比及注意力机制的影响
在应力响应预测任务中,由于构架端部悬挂部件的应力主要是由强迫振动引起,远距离的历史信息对于预测的影响相对较小。鉴于此,构架端部的振动载荷信息的重要性应当随着时间的推进而逐渐降低。为了使模型更加关注近期的信息,本研究在RNN、LSTM和TCN3种网络模型中引入了注意力机制。这一机制的引入旨在提高模型对近期时刻信息的敏感度,从而优化模型的预测性能。通过在模型中加入注意力机制,可以调整模型对不同时间点信息的重视程度,使得模型能够更加集中于对预测结果影响较大的近期信息。表2展示了引入注意力机制后各模型的性能对比结果。从中可以看到各模型在预测精度、稳定性和拟合效果方面的变化,以评估注意力机制对模型性能的具体影响。
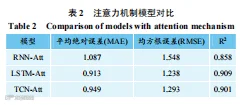
通过这种方式,可以更准确地捕捉到应力响应的特征,提高预测的准确性和可靠性。综合分析表明,在未引入注意力机制时,LSTM模型在预测精度上表现最佳,其次是RNN模型,TCN模型则相对较弱。然而,当引入注意力机制后,预测精度的排序发生了变化,LSTM模型依然保持领先,其次是TCN模型,而RNN模型则表现最差。具体来说,注意力机制对RNN模型产生了负面影响,导致其平均绝对误差(MAE)增加了9.20%,均方根误差(RMSE)增加了9.46%,决定系数(R2)下降了2.67%。相反,对于LSTM模型,注意力机制的引入提升了预测精度,MAE降低了1.95%,RMSE降低了2.94%,R2提高了0.62%。对于TCN模型,注意力机制带来了显著的性能提升,MAE降低了11.88%,RMSE降低了14.85%,R2提高了4.35%。根据这些指标,可以得出结论,引入注意力机制后的LSTM模型(LSTM-Att)展现出最优的预测性能。
3.3试验验证及结果分析
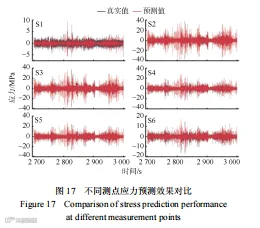
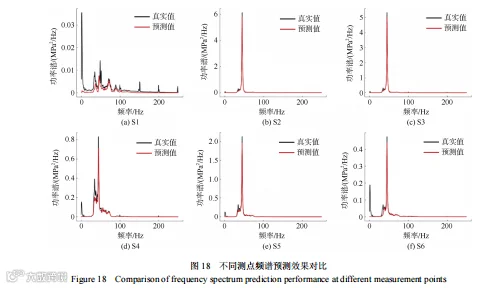
为了检验LSTM-Att模型的鲁棒性,本研究将其应用于轨道检测装置的6个应力测点进行应力预测。通过对比分析预测值与真实值在时域和频域的差异,可以评估模型的性能。图17展示了S1至S6这6个测点的应力预测结果。时域图显示,除了S1测点外,其他5个测点的预测应力值与实际应力值非常接近,表明模型对于非平稳冲击信号也能实现良好的拟合。这一结果验证了LSTM-Att模型在时域上的准确性和可靠性。进一步对这6个测点的预测应力进行了频谱分析,结果如图18所示。频谱图显示,除了S1测点外,其他5个测点预测值和真实值的功率谱密度变化趋势具有较好的一致性,说明预测应力能够准确地反映出实际应力的主要频率成分。这一发现进一步证实了LSTMAtt模型在频域上的有效性,表明该模型不仅在时域上能够提供精确的预测,而且在频域上也能够捕捉到应力信号的关键特征。这些结果共同证明了LSTM-Att模型在应力预测任务中的优越性能和鲁棒性。同时,从S1测点的频谱图可以明显看出,试验数据存在50Hz倍频的工频干扰。
4结论
本研究针对轨道交通车辆构架端部悬挂部件疲劳应力监测难题,提出基于深度学习的间接监测方法。通过构建RNN、LSTM和TCN时序回归模型,建立构架端部振动加速度与部件应力的映射关系;引入注意力机制优化模型性能;并在轨道检测装置6个危险测点完成跨域验证。主要结论如下:1)本文利用构架端部易测的振动加速度信号(纵向、横向、垂向三轴)实现对难测部件应力的实时监测。该方法通过滑动窗口机制处理200Hz采样数据,构建6输入1输出的时序回归系统,在3000s数据集上实现了应力响应的有效预测。2)本文优化了LSTM-Attention预测模型并揭示参数适配规律。通过系统实验确定了LSTM网络的最优参数组合(特定序列长度、神经元数量和层数),其基础模型已能有效捕捉载荷-应力映射关系。引入注意力机制后,模型对近期振动特征的敏感性增强,预测精度进一步提升。参数分析揭示了关键设计规律:序列长度设置与构架主振动周期相协调,TCN的层级深度匹配应力传递的时空尺度,且注意力机制对时序卷积网络的优化效果最为显著。3)验证了复杂工况下的工程适用性。在轨道检测装置S1~S6测点验证表明:LSTM-Att模型对非平稳冲击信号的时域预测误差<5%(S2~S6);频域分析中可准确捕捉44.5Hz共振主频(功率谱密度误差<3dB);在存在50Hz工频干扰的环境中仍保持稳定。该模型实现了时/频域双重精度验证,满足复杂线路环境的监测需求。
消息由中国城市轨道交通网CCRM整理编辑,文章来自都市快轨交通,涉及版权请联系删除,如有转载请标明出处)