

两周前,vivo 手机在MWC 上海站正式对外展出了TOF 3D 超感应技术。引爆了市场对TOF技术应用的热情。舜宇智能光学公司作为国内从事深度感知的先行者,在TOF技术领域有着完整的技术线路和产品布局。近期我们将从原理级——器件级——模组级——产品级,四个维度对TOF技术做深度解读。
TOF,即Timeof Flight,是一种利用飞行时间进行测距的方法。通过红外光在空气中的飞行时间,计算出目标体的深度信息。同时可在获取Depth信息的基础上,引入与之匹配的RGB信息,实现RGBD融合,将为客户的测量方案提供新思路。
在TOF的实现技术上,分为直接飞行时间法(D-ToF)和间接飞行时间法(I-ToF)。
D-ToF技术:光发射,测量光从发射到返回需要的时间差,乘以光速除以2,得出深度信息。由于传感器sensor需要具备PD和计数功能,成本过高,且由于器件受限,无法实现高精度。
I-ToF技术:光发射,测量光从发射光波到返回光波之间的相位差。该技术最大的优点就是利用相位差降低了对传感器sensor的要求。
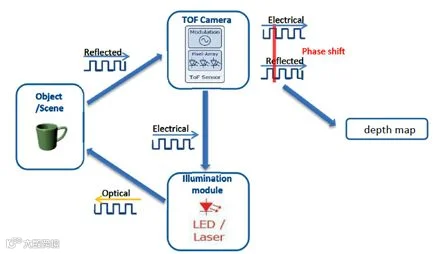
具体实现上,用正弦信号作为脉冲调制信号,因此TOF相机发射与接收的信号均为正弦信号。
假设发出信号为:

考虑到噪声和衰减,则返回的信号为:

其中表示外部环境叠加进去的干扰噪声,为信号的衰减系数。
采用4相位(0°,180°,90°,270°)来实现四步相位法。过程如下:




可得到:



因此,测量距离:

下一期,我们将继续从原理角度分析TOF测量的精度误差及双频测量方式,并剧透舜宇智能光学现有的一款量产TOF模组参数。小伙伴们有没有很期待哦。

