

在智能家居越来越普及的今天,随着生活节奏不断加快,扫地机器人成了现代人日常清洁的首选。扫地机器人销量不断的增长,同时在使用时,也常因为不智能而带来的使用困扰引发抱怨,今天我们来说说扫地机器人的现状以及演进,或许可以由演进的路径来寻找适合我们的扫地机器人。

第一代
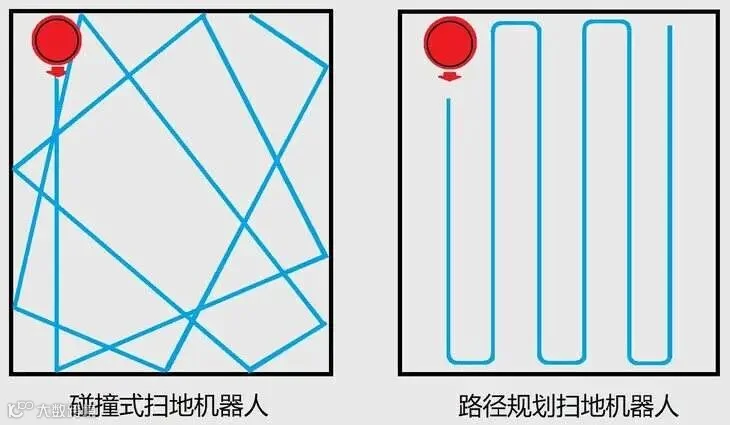
第一代扫地机器人采取随机行走的方式,存在重复清扫以及漏扫行为,效率较低。
第二代
为了解决这个问题,之后后衍生出第二代扫地机器人,机器内部增加了IMU装置,使扫地机器人更有规律的清扫,增加清扫效率。
第三代
到了第三代扫地机器人,则是市场上更为普及更智能的产品,我们可以通过手机操控,设定禁止区域、指定清扫区域等等的全局规划的扫地机器人。达成全局规划在市场上常见的有两个方案,一个是通过摄像头视觉导航,补偿IMU误差,另一个是通过LDS激光导航来创建手机地图。
然而,即便是第三代的智能扫地机器人仍然存在多个问题,例如透过视觉导航的在低照度环境,就无法建立完整地图,与二代的IMU扫地机相差无几,而LDS激光导航产品,为了保证获得全新数据,360°旋转激光探头必须一直旋转,结果就是会缩短产品寿命,同时结构凸起容易低矮处卡机,无法进入沙发、衣柜底下等缝隙。
除此之外,第三代的智能扫地机器人对多数的低矮障碍无法有效避开,由于“凸”起的结构容易引起卡机、电线或头发缠绕,地毯或门槛石高低落差等因素造成的无法脱困问题,需使用者预先创造出适合扫地机的清扫环境才能放心开启清扫。一系列不良的用户体验感,与用户“解放双手”的消费初衷背道而驰,由此不难发现,一款“非凸起结构”、“非动件”、“能完成低矮障碍侦测”的产品是大势所趋。

