

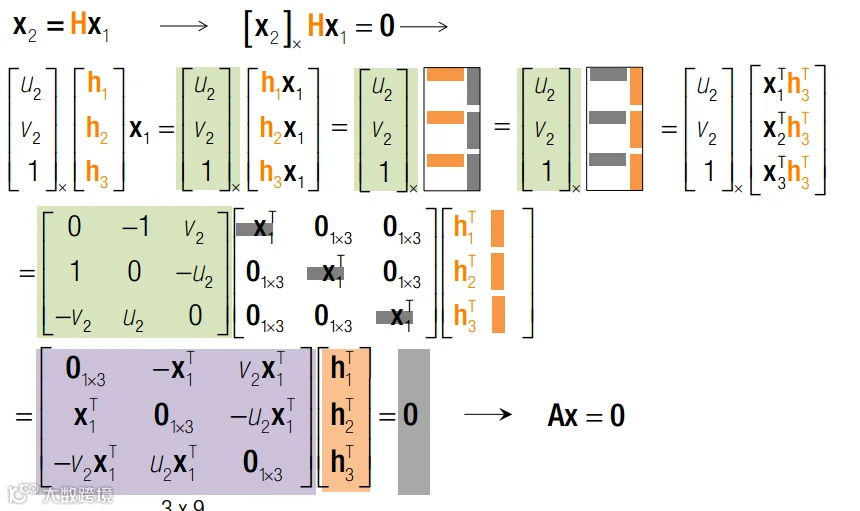
1、由单应矩阵进行位姿估计
2、由射影变换进行位姿估计
由单应矩阵进行位姿估计的前提是所有点都在一个平面上。而由射影变换进行位姿估计则舍弃了此前提,故上一节是本节的一个特例。此问题学名为PnP问题:perspective-n-point。
仿造上面的思路,我们依旧可以写成以下形式:
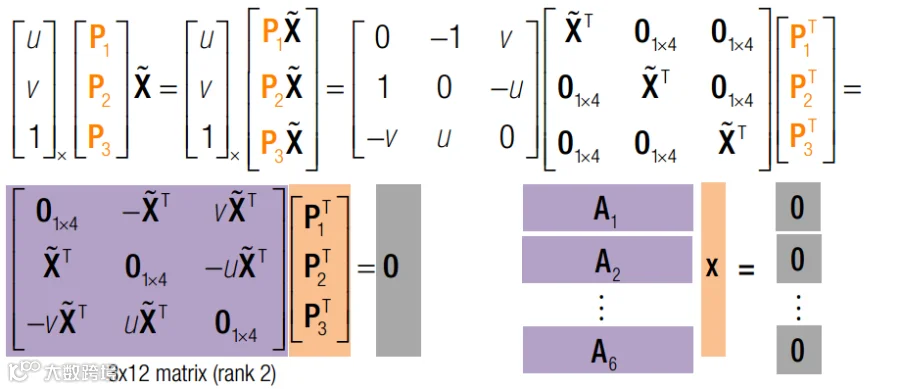
此处射影矩阵一共有12个未知数,9来自旋转矩阵,3来自平移向量。每个点可以提供2个方程。故只要6个场景点,我们就可以用奇异值分解获得P矩阵的值。同样,在获得P矩阵后求T = k-1*P,最后利用奇异值分解修正T.
不过按照常理,此问题只有6个自由度(3平移,3旋转)。我们使用6个点其实是一种dirty method。
3、由两幅点云进行位姿估计
对于现在很火的RGBD相机而言,可能这种情况会比较多。从不同角度获得了同一物体的三维图像,如何求取两个位姿之间的变换关系。这个问题有解析解的前提是点能够一一对应上。如果点不能一一对应,那就是ICP算法问题了。
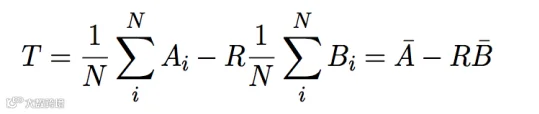
此问题学名为:Procrustes Problem。来自希腊神话。用中文来比喻的话可以叫穿鞋问题。如何对脚进行旋转平移,最后塞进鞋里。其数学描述如下:通过选择合适的R,T,减小AB之间的差别。
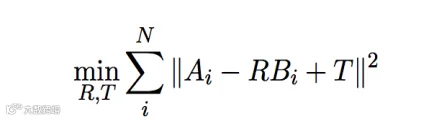
T 其实很好猜,如果两个点团能重合,那么其重心肯定是重合的。所以T代表两个点团重心之间的向量。此问题则有如下变形:
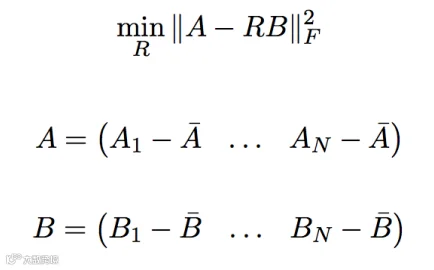
由矩阵分析可知,向量的2范数有以下变形:

由矩阵分析可知,最后两项实际上是相等的(迹的循环不变性与转置不变性)
那么优化目标又可以转为:
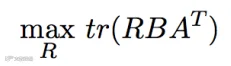
迹是和奇异值相关的量(相似变换迹不变)

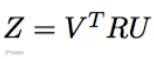
显然,如果Z的迹尽可能大,那么只有一种情况,Z是单位阵,单位阵的迹是旋转矩阵里最大的。所以R的解析解如下:
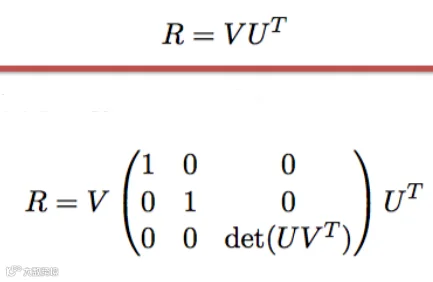
至此,我们获得了3D--3D位姿估计的解析解!
这里汇聚众多行业精英,
这里探讨行业标杆力量,
这里是机器人视觉人畅所欲言的小天地,
小编在此诚挚邀请你及你志趣相投的伙伴们,
扫描二维码进入“机器人视觉交流群”,
让我们共同探讨、交流学习。
悄悄说,群内经常有福利放送哦。
如需入群,添加小助手微信账号,备注“姓名&职务&学校或公司&所属行业”即可进群


