

作者 - 凭楼倚栏听风雨
本期核心关键词 - AR眼镜

欢迎回到微纳技术,让我们继续探索AR眼镜的“前世今生”,从技术路线到波导设计简述(下篇)。
点击下方,即可查看上篇稿件

延伸阅读:AR眼镜“前世今生”
2.2 眼盒(眼动范围)
在AR设备中眼盒是非常关键的参数,它决定了人眼能够看到完整图像的范围,眼盒是3D空间的锥台区域,如图9所示,这个锥台区域的边界由微投光机的FOV和出瞳大小决定,在这个空间上,使用者的瞳孔可以获取所有视场。

图9 - 衍射光波导中眼动范围
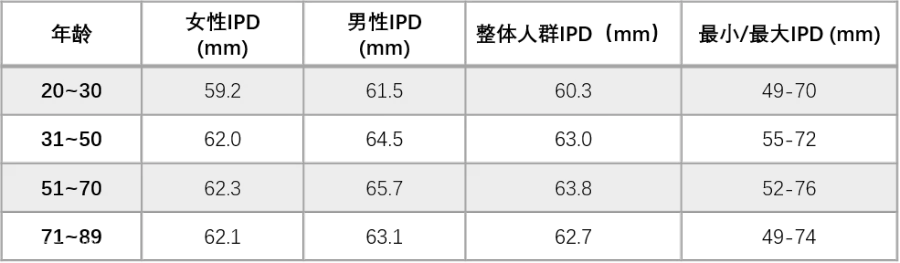
为了提高使用者的体验感,至关重要的一点是覆盖大部分人的瞳间距(Inter-pupillary Distance,IPD)即需要足够大的眼盒。表2给出了不同年龄组的男性和女性的平均IPD值。扩展眼盒的方案有两种:一种是通过主动器件,如二维振镜、微机电系统等,实现系统眼盒的偏移,再配合眼动追踪系统,确保用户的眼睛始终处于一个较小的眼盒内。第二种是通过被动器件实现系统出瞳的复制产生一个较大的眼盒,使得用户的眼睛在一定范围内移动时能够一直处于眼盒内。
第一种方案有利于降低功耗,但此方案增加了成本同时也增加了系统的延迟,在近眼显示设备中对于延迟的要求十分苛刻,所以使用第二种方案作为扩瞳方案是较佳的选择。在基于衍射光波导的设计中使用的便是此种方案。
表2 - 不同人群的IPD值[12]
● 2.2.1 一维扩瞳
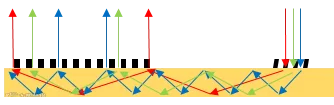
为了适应大的IPD,对于水平方向上的扩瞳尤为重要。如图10所示为一维扩瞳方案,其原理为微投光机出射的光线经耦入光栅衍射,满足全反射条件的衍射光第一次入射至耦出光栅之后其衍射光突破全反射条件耦出到人眼,而零级光继续向前传播,在下次入射到耦出光栅时衍射光出射至人眼,零级光继续向前传播,如此周而复始达到扩瞳的目的。为了在非扩瞳方向上产生足够大的眼盒,微投光机产生的输入光斑需要有较大的长宽比,这导致微投光机的体积过大(如基于一维扩瞳方案的Lumus LCoS光机)。
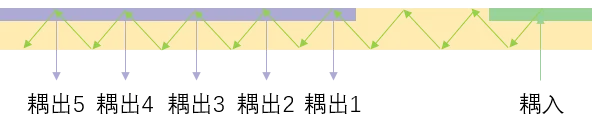
图10 - SRG光波导一维扩瞳原理图
● 2.2.2 二维扩瞳
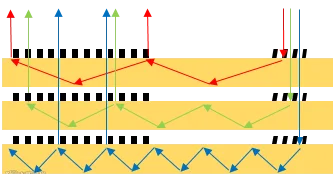
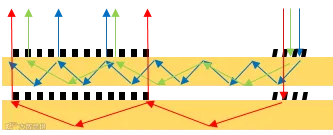
考虑到光机的视场、尺寸、体积等因素,当微投光机出瞳直径较小时,需要对眼盒进行二维扩瞳。对于二维扩瞳方案来说有两种扩瞳方式,当使用一维光栅时,如图11(a)所示,耦入光需要先经过转折光栅进行一维扩瞳而后通过耦出光栅对另一个维度进行扩展,最终在耦出光栅上耦出二维扩瞳之后的图像。当使用二维光栅时,如图11(b)所示,耦入光在耦出光栅上进行二维扩瞳并输出到人眼。
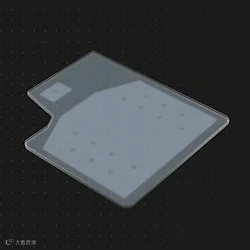
图11 二维扩瞳方案示意图
👈 (a)一维光栅扩瞳
(b)二维光栅扩瞳[13] 👉
2.3 光栅矢量分析
在光波导设计中使用K域能够快速分析出光线经光栅衍射之后的传播方向。波矢K的定义为𝐾=2𝜋/𝜆 ,其中𝜆为波长,K为光线传播方向上的矢量。光栅矢量Kg的定义为Kg=2𝜋/𝛬,其中𝛬为光栅周期,Kg为光栅矢量的方向。K域分布如图12所示,横/纵坐标分别代表x/y方向上的光栅矢量与真空中波矢的比值(比值为折射率n),黑线圈代表最小折射率1(最大波矢、最小光栅矢量),绿圈代表最大折射率(取决于波导的折射率),黑圈以内部分的光线不满足全反射条件透射出波导,绿圈代表传播模式的临界条件,绿圈以外部分的矢量无法传播。只有在黑圈和绿圈之内的光线才满足全反射条件,能够在光波导内传播。图12为三分区波导光栅K域图,中间方块区域代表微投光机耦入的FOV的大小,波导折射率越大代表能够容纳的FOV越大。中心方块区域代表微投光机耦入的各视场光线,经耦入光栅矢量向右传播,并满足全反射条件,经转折光栅矢量向左下方传播也满足全反射条件同时在水平方向上完成一维扩瞳,最后经耦出光栅矢量将光线耦出至中心位置同时完成竖直方向上的扩瞳。(二维光栅矢量分析方法与上述方法类似)
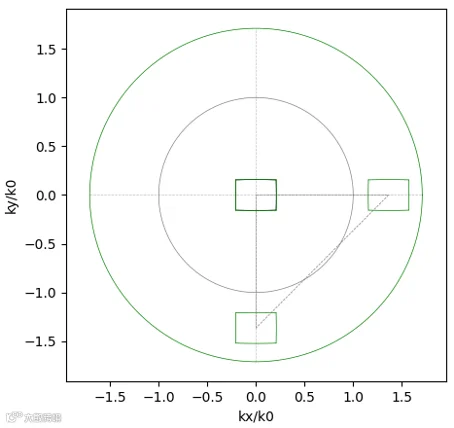
图12 - 三分区K域图
2.4 视场角
在AR眼镜的佩戴中,人们期望拥有较大的视场提升观感和沉浸感。图13中FOV的定义为,对角线视场与水平/垂直视场有关,当光在光波导内部传播时,全内反射角由光波导的折射率决定。想要获得大FOV需要增加波导的折射率,目前常用波导能够支持的FOV在30°左右。除了增加波导折射率,增加FOV之外,还可以通过扩大系统的自由度来扩大视场。
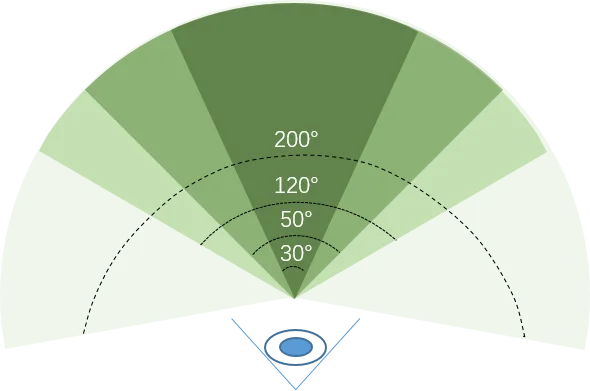
图13 - FOV示意图
2.5 亮度均匀性
亮度均匀性包括视场均匀性和眼盒均匀性。视场均匀性反映了在眼盒内某位置处,不同视场的能量均匀性。如果视场均匀性较差,反映在图像上就是明暗不一,如图14(左)所示,14(右)视场均匀性较好。眼盒均匀性反映的是同一个视场,在不同出瞳位置的能量分布均匀性。如果出瞳均匀性较差,反映在实际使用时,则是当人眼在眼盒内移动时,图像会出现明暗的变化。在实际佩戴中,人眼在眼盒中的位置是固定的,所以视场均匀性指标比眼盒均匀性指标更重要。实现亮度均匀性的方法可以通过优化光栅结构(倾斜光栅)和光栅区域(分区调制)来实现。
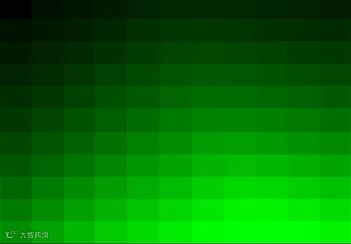
图14 - FOV为30°时的效率分布对比图
2.6 颜色均匀性
由光栅的衍射特性可知,在彩色SRG光波导的设计中颜色均匀性是较难解决的难题。使用三片波导分别传播蓝光、绿光、红光能够实现极好的颜色均匀性,如图15(a)所示,HoloLens 1和Magic Leap One使用了此种架构,但这增加了成本和重量,不利于将AR眼镜推向消费端。而使用两片波导在一定程度上缓解了上述弊端,如图15(b)所示,使用两片波导有两种方式,方式一、蓝光和部分绿光在第一片光波导中传播,红光和另一部分绿光在第二片波导中传播,此种方式较难实现完美的绿光的拼接。方式二、由于蓝光和绿光衍射光角度差别相对较小,可以使用一片光波导传播蓝绿光,另外一片光波导传播红光,从而实现较好的颜色均匀性。
单层光波导可以在透射或反射模式下工作(仅透射,仅反射,一面反射一面透射),为了将成本和重量降至最低,单片彩色波导越来越受到人们的青睐,如图15(c)所示,此种方案可以产生最好的MTF和最低的成本,由于蓝绿红衍射角度的不同在单片波导中颜色均匀性极难实现,这需要一些特殊的手段,例如特殊的光栅结构等,然而,波导的效率与眼盒内的亮度均匀性/颜色均匀性之间存在竞争关系,需要对二者予以权衡。耦入光栅和耦出光栅使用相同的光栅周期能够避免色散问题,其中光栅以相反的方向工作。
👈 图15(a)三层光波导架构
(b)双层光波导架构
(c)单层光波导架构 👉
2.7 SRG光波导模型的建立
在SRG光波导的设计中使用二维扩瞳的方式获取合适的眼盒,由2.2节描述可以确定眼盒的尺寸。根据人眼与AR眼镜的距离可以确定适眼距离。最后根据光机的FOV、眼盒尺寸和适眼距离确定耦出光栅区域,如图16(a)所示。确定耦入(转折)耦出光栅类型(一维/二维光栅),根据耦入(转折)耦出光栅类型确定分区方式,结合2.3节中的矢量分析,确定光栅周期、旋转角度。通过对FOV中极限视场角的光线追迹确定光波导的初始模型及轮廓,如图16(b)所示。
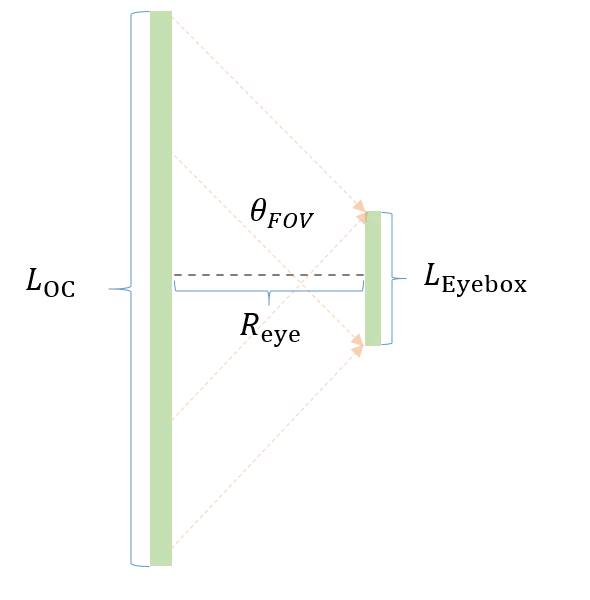
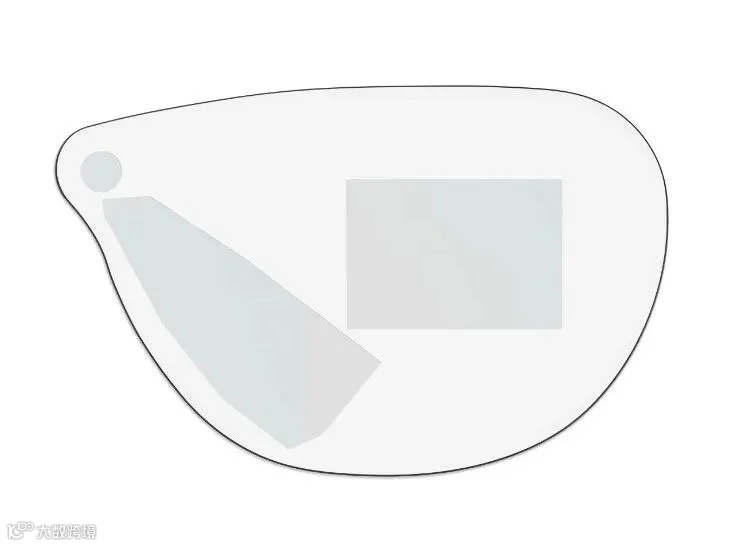
👈 图16(a)耦出光栅大小计算示意图
(b)SRG波导片轮廓及其对应的光栅区域示意图 👉
2.8 SRG光波导的优化
用以上设计的均匀光栅波导片作为初始结构,以耦入(转折)耦出光栅的最终入射到人眼的光效作为优化目标,结合相关优化算法,对波导片进行优化。此时视场/眼盒均匀性较差,为了进一步提升效率和视场/眼盒均匀性,采用对光栅区域分区进行调制(占空比、高度等调制方法)进一步提升波导片的效率、视场/眼盒均匀性、颜色均匀性等。对于SRG光波导的优化,可以采用梯度算法如图17所示、粒子群算法、遗传算法、模拟退火算法等,每种算法均有其优缺点,在优化过程中可以根据优化目的选取合适的优化算法。
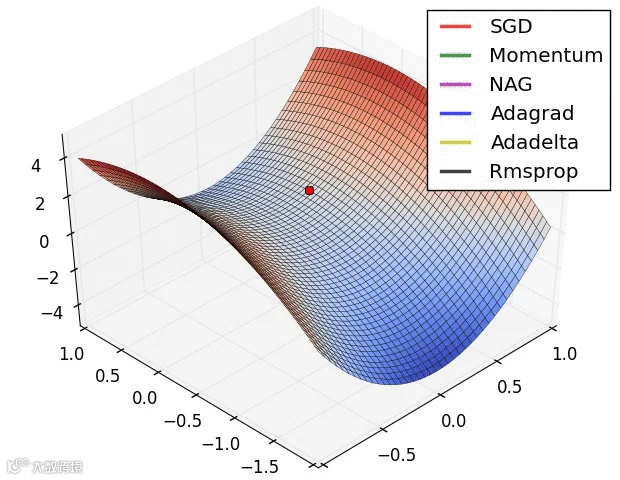
图17 - 梯度算法示意图[14]
2.9 SRG光波导常见问题分析
● 2.9.1 漏光
微投光机的光线传输至耦出光栅时会产生反射的衍射光R1与透射的衍射光T1。透射的衍射光T1即为漏光,如图18所示。因漏光会引起能量的浪费和隐私的泄露,在现实应用中期望T1衍射光的效率为零。在实际的设计中可以在耦出光栅区域选用特殊光栅结构达到抑制T1级的目的。
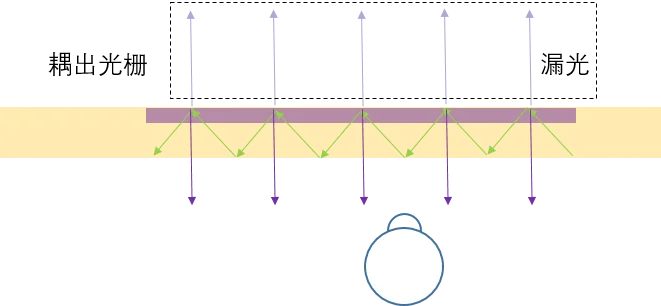
图18 - 衍射光波导中的漏光示意图
● 2.9.2 鬼像
鬼像产生的原因有两种,一种来自于微投光机,微投光机出射的光,经耦入光栅耦入波导时,有部分光返回微投光机,经过复杂的微投光机系统后又返回波导,经波导耦出进入人眼形成鬼像,如图19(a)所示。可以通过抑制R0的光线或者旋转一定角度使出射光不在眼盒范围内从而达到抑制鬼像的目的。另一种来自于外界环境,外界的实物光线经过耦出光栅,未被衍射的光线直接进入人眼,而被衍射的光线则形成鬼像,如图19(b)所示。
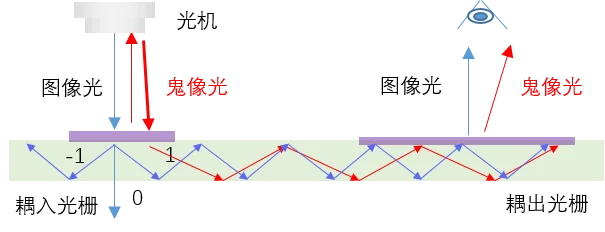
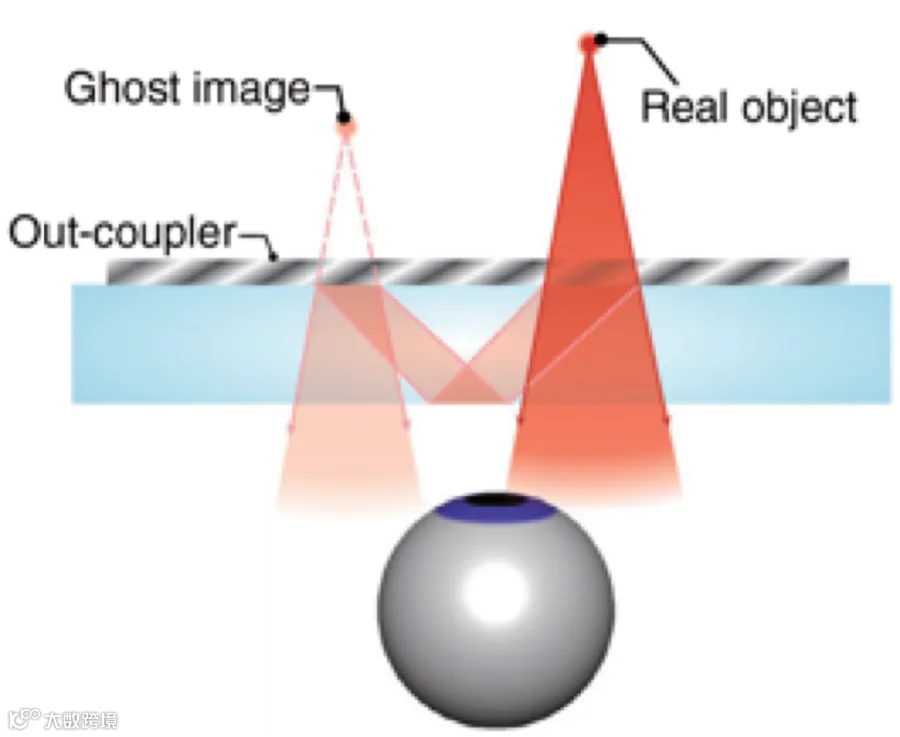
图19 - 衍射光波导中的鬼像示意图
👈(a)源于光机的鬼像
(b)源于外界环境的鬼像[2] 👉
● 2.9.3 彩虹纹
在衍射光波导中,衍射光栅对不同波长的光的衍射角度不同,从而导致白光入射到光波导上时产生光的色散。当外界环境光经过光栅区域时,小角度的衍射光在波导内传输,大角度的环境光衍射进入人眼形成彩虹纹,如图20(a)所示。
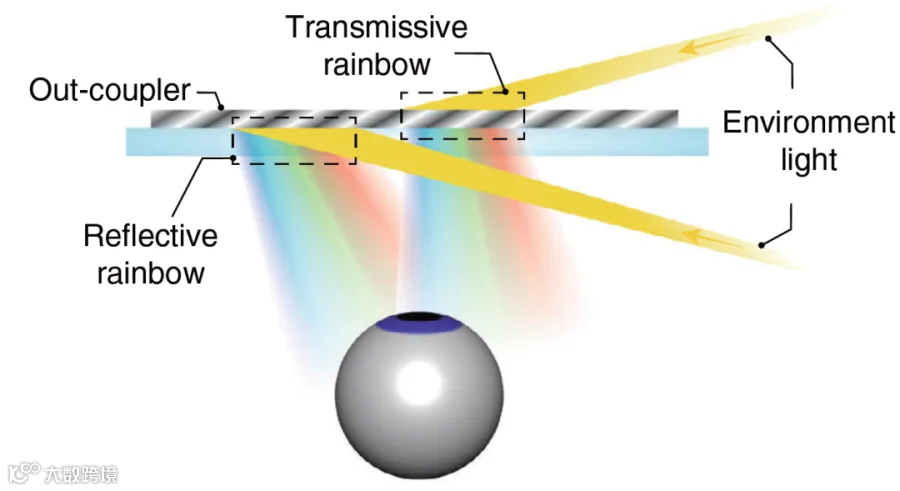
图20 - 衍射光波导中的彩虹纹示意图[2]
总结展望
在现实世界与虚拟世界互动方式中AR眼镜被赋予了很高的期望。但它的发展需要有一个完整的生态系统,包括高折射率超平板玻璃晶圆,高折射率树脂材料,工艺设备,NIL设备,以及专门的软件设计工具等。目前各种光波导的设计方案百家争鸣,各有优缺点,一旦某个技术方案突破现有瓶颈,将为近眼显示打开一扇新的大门,有望改变人类的生活方式。
参考文献
1. J. Jerald, The VR Book: Human Centered Design for Virtual Reality, ACM Books, 978-1-97000-112-9, 2016.
2. Xiong et al. Augmented reality and virtual reality displays: emerging technologies and future perspectives Light: Science & Applications. 10:216. 2021
3. 翁 一 士, 彩色波导显示光学耦合技术研究[D]. 东南大学,2019年
4. LUCAS B D, KANADE T. An iterative image registration technique with an application to stereo vision. Vancouver, British Columbia, 1981
5. SAYERS R. Awareness-Raising. Bangkok: UNESCO Bangkok, 2006.
6. Wheelwright, B. et al. Field of view: not just a number. Digital Optics for Immersive Displays, Vol. 10676 (International Society for Optics and Photonics), p. 1067604. 2018.
7. Tao Zhan. et al. Augmented Reality and Virtual Reality Displays: Perspectives and Challenges. iScience 23, 101397, 2020.
8. Lee, Y.H., et al. Prospects and challenges in augmented reality displays. Virt Real. Intell. Hardware 1, 10–20. 2019.
9. https://lumusvision.com/products/oe-maximus/
10. M. A. Golub, et al. Bragg properties of efficient surface relief gratings in the resonance domain, Optic Commun., vol. 235, pp. 261–267, 2004.
11. T. Yoshida, et al., A plastic holographic waveguide combiner for light-weight and highly-transparent augmented reality glasses, J. SID, vol. 26, no. 5, 2018.
12. Kress B C. Optical architectures for augmented-, virtual-, and mixed-reality headsets. Society of Photo-Optical Instrumentation Engineers, 2020.
13. https://waveoptics.ar/
14. https://www.codenong.com/cs105952281/


未经授权,任何人或机构不得以任何形式转载、摘编或引用本文中的全部或部分内容,感谢配合。