

旌旗动
战鼓响
二季度的序幕已经拉开
来看看北汽越野车的奋斗图景!

近年来,随着汽车制造业自动化水平的不断提升,机械自动化已经成为决定工厂生产质量的关键要素之一。伴随越来越多的机器人战队加入到越野车工厂,如何处理协调好机器人与其他设备的关系,已经成为越野车公司生产环节的一个重要话题。
为做好机器人设备的日常管理工作,进一步提高生产质量与效率,越野车工厂设备动力部自2017年起组建成立了“机器人小组”。作为熠熠发光的“星之队”,小组成员从各个关键厂区遴选专业人才组成,根据维护需求下沉到核心区域,负责机器人的“驯养”工作。
前些时候,又有一个机器人在工作时“耍小脾气”了,给工作提出了难题:在涂装车间色漆内喷工位生产过程中,有一个开门机器人负责打开车身四个门。可是每次工作时,它的开门爪与车门工装卡具常常脱钩。脱钩后,不仅会导致喷涂程序中断报警,最糟糕的是,还有可能会导致剐蹭车身情况。针对这个问题,4月初机器人小组用他们自创的“WATCH”法,成功破解了难题。
WATCH法是什么?
是流程
也是方法
Watch/观察
针对开门机器人的机械爪脱钩问题,机器人小组首先进行了连续观察。通过观察发现,在机器人完成下压动作后,它的机械爪未与卡具精准啮合,只钩到了工装卡具的一半。而且,这种情况多发生在工装卡具发生变形的情况下。

✦
观察

Analyze/分析
发现原因后,机器人小组马上对开门爪下压距离进行了实际测量,结合车型离线仿形程序,决定采取调整坐标点的解决方式。
✦
分析

Test/验证
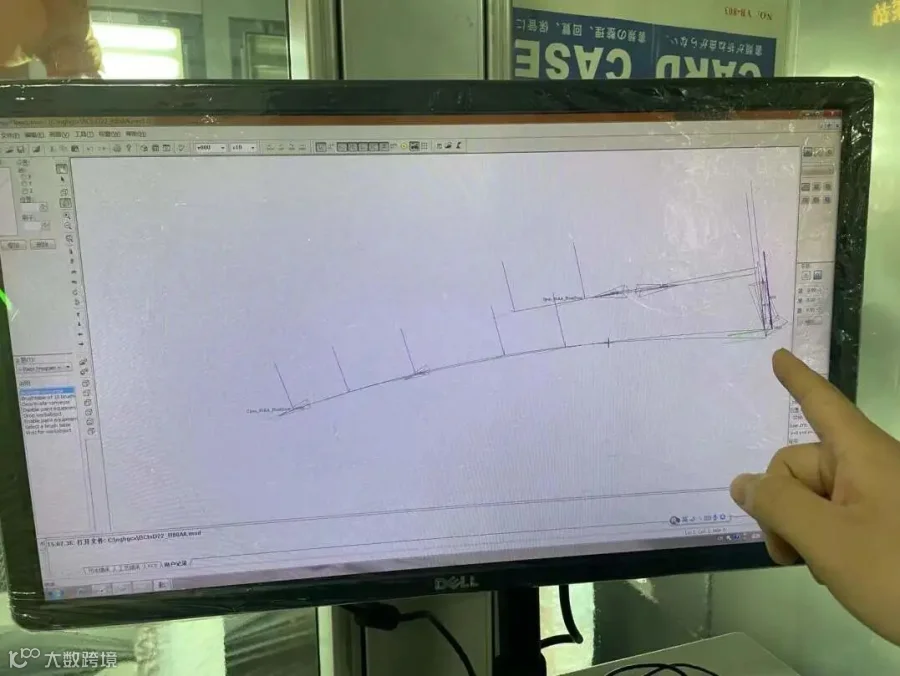
进入验证阶段,机器人小组把开门爪下压后的某p30 坐标点位置 Y 轴坐标降低10了mm。通过反复离线测试后,决定进行实车验证。在经过多台实车喷涂后,开门爪脱钩现象已大为好转。但是个别车还是存在脱钩问题。

Check/核验
在对质量极致的追求下,小组绝不肯轻易放过每一个细节。经过第一次的验证,大家进入二次优化核验过程中。通过一致的讨论和反复修改离线程序,小组决定将开门爪下压之前的某 p20 点位置 Y 轴坐标也降低 10mm。第二次的仿形轨迹程序优化以后,历经一个月的连续实车生产,最终脱钩问题得到彻底解决!

✦
核验

Harvest/沉淀
每一个小问题的解决,都是经验的一次宝贵累积。机器人仿形程序的优化,是一个技术不断累积的过程。如何以机器人轨迹最小的变动调整、最小的成本问题,就像是在棋盘上下一盘心思缜密的棋。
作为质量管理的重要一环,自动化设备的管理将在未来很大程度上关联着企业的精益生产效率。越野车公司的“机器人小组”将会继续发挥主观能动性,在推动企业自主化的进程中释放更多智能化红利!
以奋发有为的新姿态
干出热火朝天的新事业
(冲压与设备党支部)
