
本文转载自CSDN论坛作者G2突破手259的博客,转载文章仅供学习和研究使用。
简介
DSI概述
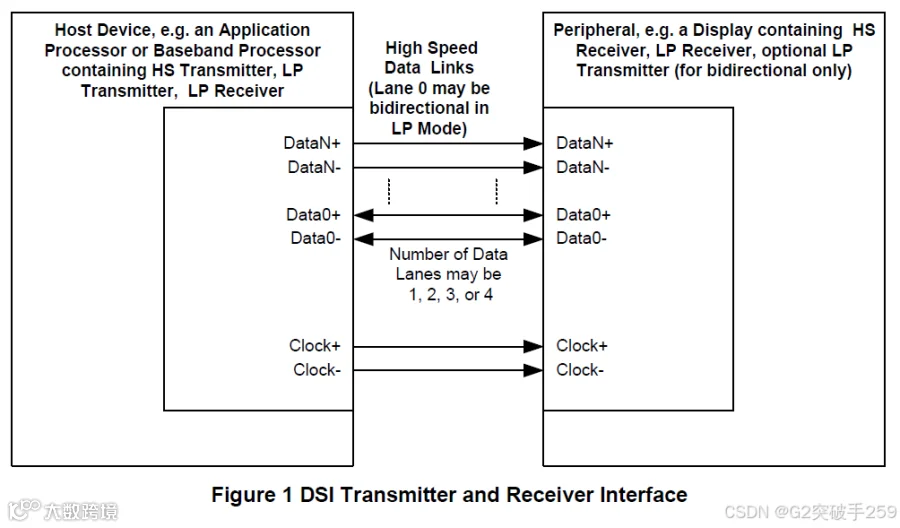
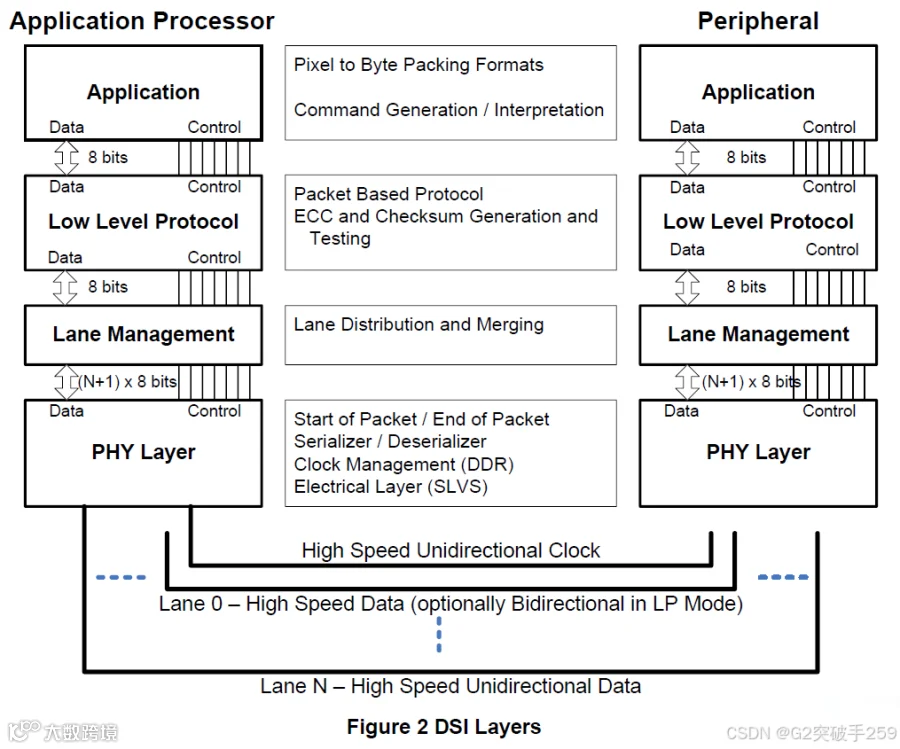
DSI物理层
-
Data Lane Module: CIL-MFAA (HS-TX, LP-TX, LP-RX, and LP-CD) -
Clock Lane Module: CIL-MCNN (HS-TX, LP-TX)
-
Data Lane Module: CIL-SFAA (HS-RX, LP-RX, LP-TX, and LP-CD) -
Clock Lane Module: CIL-SCNN (HS-RX, LP-RX)
-
Data Lane Module: CIL-MFAN (HS-TX, LP-TX) -
Clock Lane Module: CIL-MCNN (HS-TX, LP-TX)
-
Data Lane Module: CIL-SFAN (HS-RX, LP-RX) -
Clock Lane Module: CIL-SCNN (HS-RX, LP-RX)
往期推荐
|
|||
|
|||
|

牛芯半导体(深圳)有限公司(简称“牛芯半导体”)成立于2020年,聚焦接口IP的开发和授权,并提供相关整体解决方案,致力成为全球领先的IP供应商。
牛芯半导体在主流先进工艺布局SerDes、DDR等中高端接口IP,产品广泛应用于消费电子、网络通信、数据存储、人工智能、汽车电子、医疗电子等领域。
未来,牛芯半导体持续响应IP市场需求,适应不断演进的接口技术和日益拓展的接口互联场景,赋能数智时代下的千行百业。