
导语:合众思壮北斗高精度板卡免费体验活动开展以来,开始陆续收到活动参与者发回的板卡测试报告,合众思壮将从各行业中甄选出部分报告与大家分享交流。
偶然的机会看到了合众思壮发布的高精度板卡测试活动,并有幸申请通过,感谢合众思壮提供的这次机会,下面我将自己对所评测板卡的一些评测心得分享给大家,希望大家多多交流。
应用背景描述:
北京某高校目前有一车辆控制项目,对车辆运动姿态控制有严格要求,要求在现场恶劣环境下能够快速获取车辆的高精度定位及姿态信息。
硬件:H321板卡、测试开发板、UA35天线、
软件:测试工具包及相关文档
测试时间:2014-11-15
测试地点:西南某项目现场

测试内容:
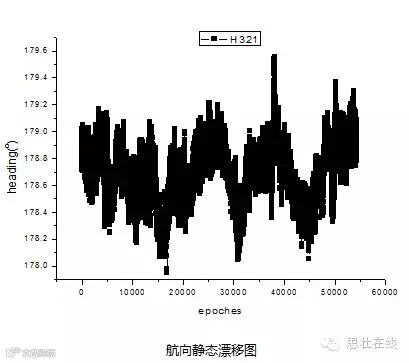
一、航向稳定性测试
测试描述,基线长:静态0.67m (天线间距);动态1.559m
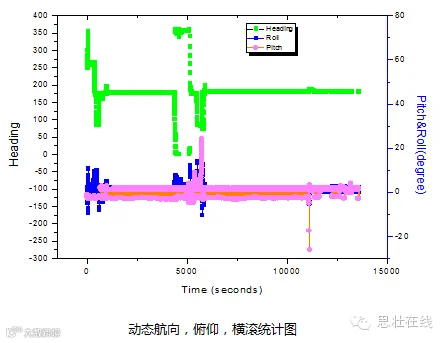
测试结果:静态情况下,H321连续测向15个小时,航向变化范围为:178.087°~ 179.496°,没有出现较大的漂移,有没有出现航向不输出的情况。内符合精度为0.23°(1σ);动态跑车时,航向连续输出,未出现航向不解算或不输出的情况。
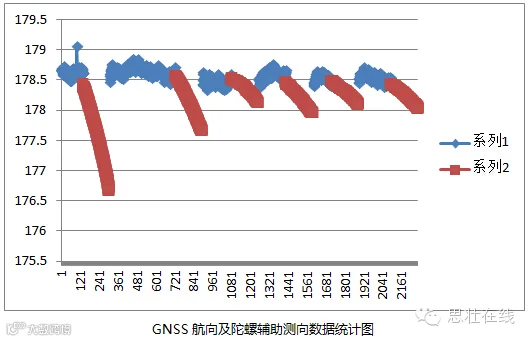
二、卫星失锁后陀螺航向保持功能
测试描述:基线长:天线间距0.63m
测试方法:本项测试为静态测试,H321测向输出后,断开GNSS天线,陀螺维持航向,超过3分钟后无航向输出,重新连接GNSS天线,是的H321重新进行GNSS测向;重复6次。由于是静态测试,在测试过程中要注意保持测向板卡水平放置,同时不能移动接收机。
测试结果:由下图可见,蓝色曲线为GNSS测向数据,红色曲线为GNSS卫星失锁,陀螺辅助测向数据。GNSS测得航向的平均值大约在178.5°左右,当GNSS卫星失锁后,陀螺自动进行辅助定位3分钟,3分钟后,无航向信息输出。陀螺测向精度随时间成线性增长,也就是,时间越长,漂移越大,精度也就越差。第一次陀螺测向时,当时间累计3分钟时,其航向增加了约2°左右,漂移较大。但是第二次至第六次的陀螺测向效果均能在3分钟内,保持航向精度小于1°甚至有3次能小于0.5°。陀螺的航向维持效果总体还是不错的。
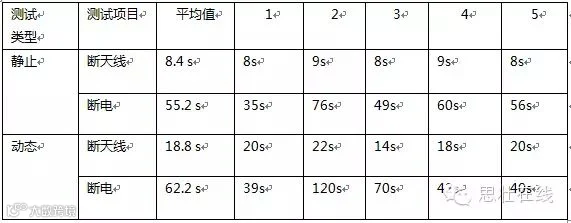
三、GNSS测向初始化时间
测试描述:基线长:1.02m

测试方法:本测试主要通过断开GNSS天线和断电重启两种方式来测试H321获得航向解的时间。并且分别进行了静态初始化和动态初始化的测试。静态初始化,是指接收机及天线静止不动;动态初始化,是指通过跑车进行动态测试。
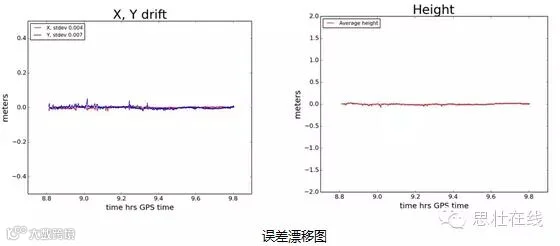
四、静态RTK定位
测试描述:约1个小时的RTK 定位数据。差分数据源:项目现场附近架设的基站,播发ROX差分数据格式;基线距离约为14km.
测试结果:对一个小时的RTK定位数据进行统计分析,结果如下:

H321本身可以作为流动站,测向的同时进行RTK高精度定位,由1个小时的定位数据看来,定位精度水平可达0.008m, 垂直为0.013m; RTK定位稳定性好。
 五、测试结论:
五、测试结论:
合众思壮公司的H321 航向输出比较稳定,在静态测试和动态测试均未发现航向不输出或者不解算的现象。测向精度在6小时静态航向测试中,精度为0.23°@0.63m基线长,对于车辆测控之类的应用来说,这样的精度可以满足应用需求。
卫星失锁后,陀螺可以无缝自动继续保持航向,3分钟基本能保持航向精度小于1°,超出3分钟后,仍未收到GNSS卫星信号,航向停止输出。航向初始化时间、卫星失锁重捕获后获得航向解的时间平均为8.4秒(静态),动态为18.8s;断电重启后获得航向解的时间为55.2秒(静态),62.2秒(动态)。长时间航向解无法解算的现象并没有出现。
H321测向的同时可以接收差分数据,同时进行RTK高精度定位,提供高精度位置信息。RTK定位较为稳定,在基线长度为14km的RTK定位精度为水平0.008m,垂直0.012m。
通过测试结论来看,合众思壮公司H321板卡能够满足车辆测控领域对精度及测向的高精度要求,可称得上是行业目前的佼佼者,相信它会在北斗高精度市场上大展拳脚,拭目以待。
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
合众思壮官方微信号:
unistrong1994
提示:长按微信号即可复制,然后点击通讯录》添加》粘贴微信号,搜索即可关注。
关注合众思壮官方微信,随时获得合众思壮企业动态、产品咨询、活动、服务、快速客服响应!