实验模态分析中的频率响应函数 (Frequency Response Function,下称FRF) 是:
基于频率的测量过程;
用于测量结构的共振频率,阻尼和模态振型;
有时称为输入和输出之间的“传递函数”;
表示线性时不变系统的输入 (x) 和输出 (y) 之间的关系。
频率响应函数(FRF)
在频率响应函数测量中,可以观察到以下情况:
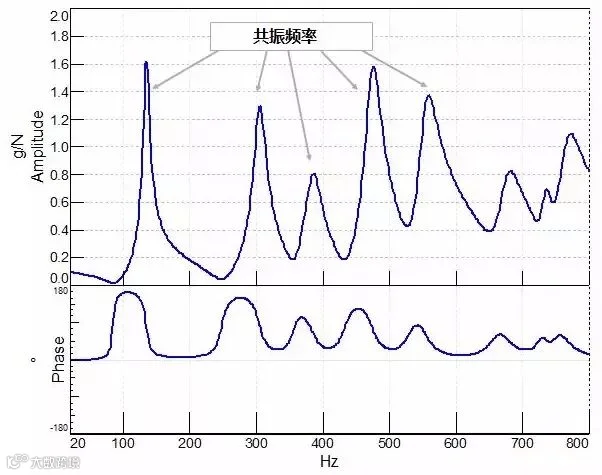
共振:峰值表示被测结构的固有频率;
阻尼:阻尼与峰的宽度成比例。峰值越宽,阻尼越大;
模式振型:获取到结构上的公共参考的多个FRF的幅度和相位用于确定模式振型。
许多类型的输入激励和响应输出可用于计算实验FRF,下面举一些例子:
对于机械结构的实验模态分析,通常输入是力,输出是加速度,速度或位移。
输入及测量可以通过:
力锤
激振器
输出响应可以通过如下方式测量:
加速度计:测量振动;
激光测振仪:测量物体表面速度。
一般来说,输入力的频谱(X)应该是平坦的,即均匀激励所有频率。当查看响应(Y)时,响应中的峰值表示被测结构的自然/共振频率。如下图所示。
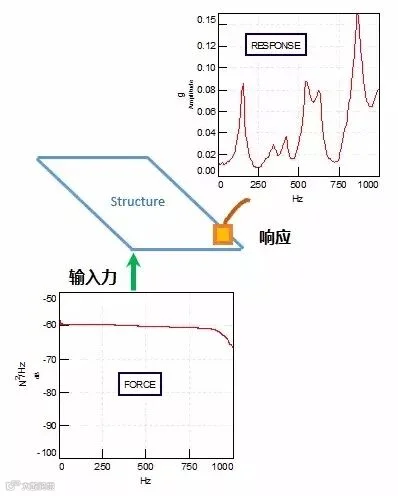
因为FRF响应被“归一化”到输入,所以得到的FRF函数中的峰值是测试对象的共振频率。
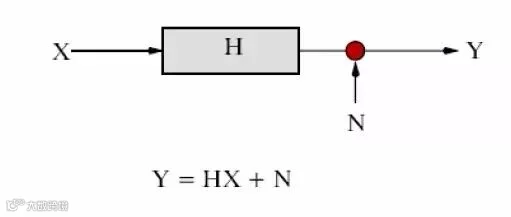
在命名法中,FRF通常由单个大写字母H 表示。输入为X 且输出为Y。H,X和Y都是函数与频率的关系。

FRF是输入(x)和输出(y)的互功率谱(Sxy)除以输入的自功率谱(Sxx)。

自功率谱Sxx 是输入频谱与其自身的复共轭,它成为一个全实数函数,不包含相位。互功率谱Sxy是输出频谱和输入频谱的复共轭,包含幅度和相位。
01
计算Coherence
相干性是函数与频率的关系,表示输出多少是由FRF中的输入引起的。它可以作为FRF质量的指标,它能够评估FRF从测量到重复相同测量的一致性。
Coherence的值介于0和1之间:
在特定频率处的值1表示FRF幅度和相位从测量到再测量是完全可重复的。
值为0表示相反,测量值不可重复,这表示测量设置中存在错误。
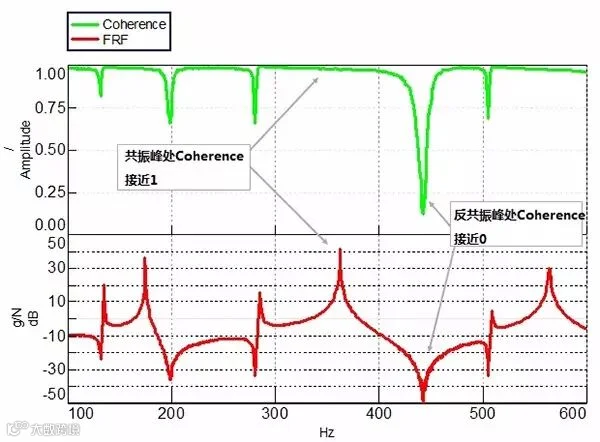
当FRF的幅度非常高时,例如在共振频率下,相干性将具有接近1的值,如上图所示;当FRF的幅度非常低时,例如在反共振处,相干性接近于0。这是因为信号非常低,它们的可重复性与仪器的本底噪声不一致,这是可以接受的。当相干在共振频率或在整个频率范围内接近0比1时,这表明测量存在问题。
问题可能出现在:
仪器损坏或设置错误:例如,ICP电源未提供给需要ICP电源的传感器;
激励不一致:结构受到力锤的激励一致性差;
激振力不足:结构响应没有得到足够的激励,例如在一个大物体上用一个非常小的锤子,激励和响应测量之间的距离很大。
02
计算估计
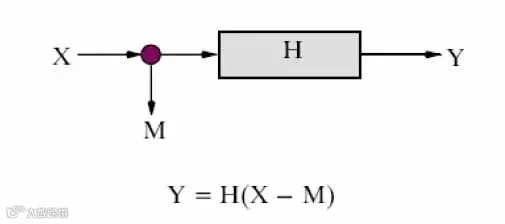
之前所讨论的频响函数计算公式是理想的情况,其输出完全由输入引起,没有任何噪声混杂进来。实际上这是不可能的,也就是输入输出中必然会包含噪声(此处的噪声是指干扰)。因而,人们为了减少噪声的影响,提出了各种估计方法,用于从实际测量的输入和输出信号出发估计出频响函数。进行FRF估计时,需要对每个频率进行估计。
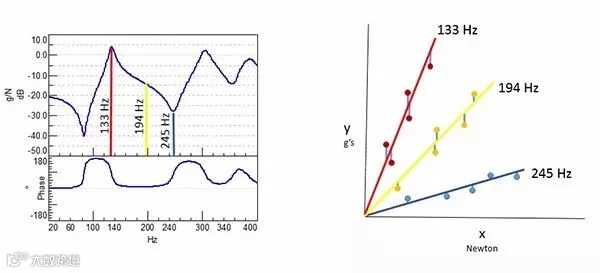
最常用的是H1估计,它假设输入上没有噪声,因此所有X测量(输入)都是准确的。假设所有噪声 (N) 都在输出Y上,如上图上侧所示;如果输入存在噪声,则该估计方法倾向于将FRF的估值偏低。H1估计反共振比共振更好。当输入不相关时,使用此估计方法可获得最佳结果,如上图下侧所示。
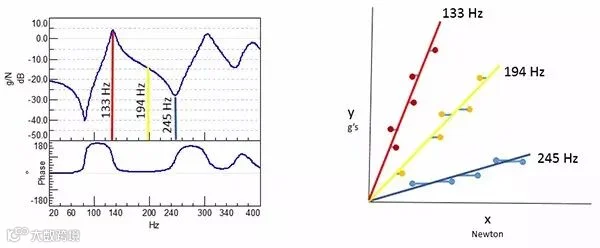
H2估计与H1估计刚好相反,这假设输出上没有噪声,因此所有Y测量都是准确的。假设噪声 (M) 仅在输入X上,如上图上侧所示;如果输出有噪声,这个估算器往往会高估FRF。该方法估计共振比反共振好。注意一点,245Hz反共振频率的校正值大于133Hz共振频率处的值,如上图下侧所示。
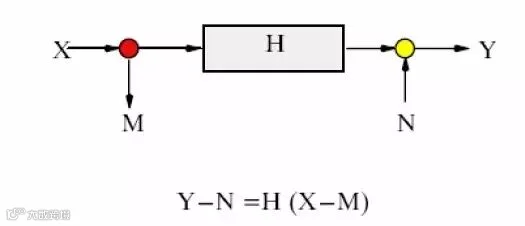
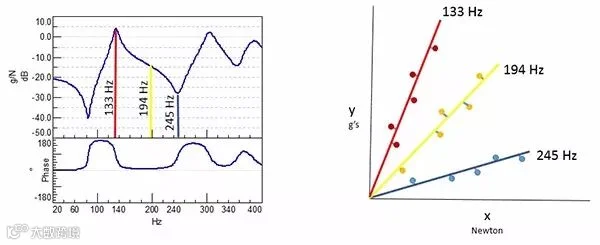
Hv估计方法能提供频率函数的最佳总体估计。它近似于共振时的H2估计量和反共振时的H1估计量。然而,它需要比其他两个更多的计算时间。Hv估计器假设X输入和Y输出都有噪声(M和N),如上图所示。
频率响应函数 (Frequency Response Function, FRF) 用于测量和表征结构的动态行为。
FRFs 包含的信息有:共振频率,阻尼,模态振型。
在创建平均FRF时,Coherence可以给出FRF质量的指示,而估计方法用于计算测量的噪声。