
点击蓝字| 关注我们
翻车机给料操作是散货码头翻车机主操司机操作工艺中的重点、难点,其操作过程直接影响了卸车作业效率,司机需要反复调整每个漏斗的给料情况并同时观察各漏斗实际料位情况,对操作司机在精力、能力等方面均提出了非常高的要求。通过应用翻车机自动给料系统,直接替代了司机卸车过程中的全部给料操作,能明显地降低翻车机主操司机操作量及工作难度,同时提高作业过程的安全性和可靠性。
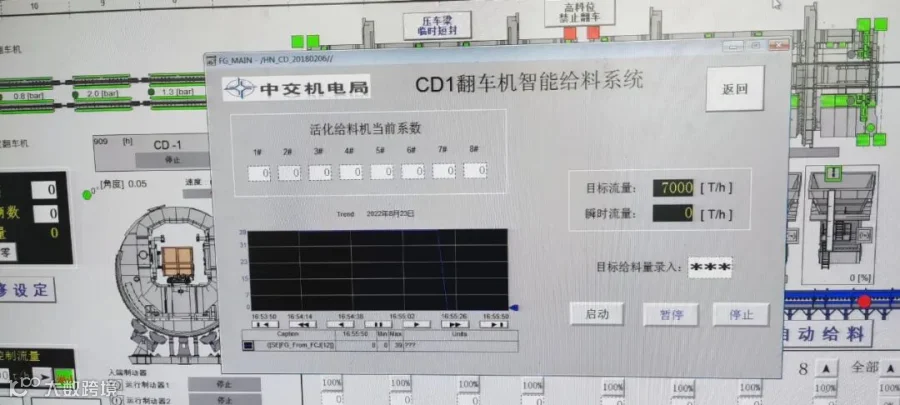
国投京唐港项目团队研发的翻车机自动给料系统,采集目标流量,由司机一键启动,通过应用双波雷达实时测控、高低料位检测、新型人工智能数据平台等技术,根据卸车作业模型等数据进行逻辑判断与处理,自动调节漏斗实际流量,直至卸车完毕,实现翻车机智能给料全过程的煤种智能识别、料斗均衡给料、瞬间大料流平衡等功能,达到翻车机自动给料作业。
该系统采用的多项技术及算法属于行业内首次应用,累计已申请各类专利4项。

中交机电局第一工程公司
供稿|陈浩
编辑|钮娜
审核|詹毅