
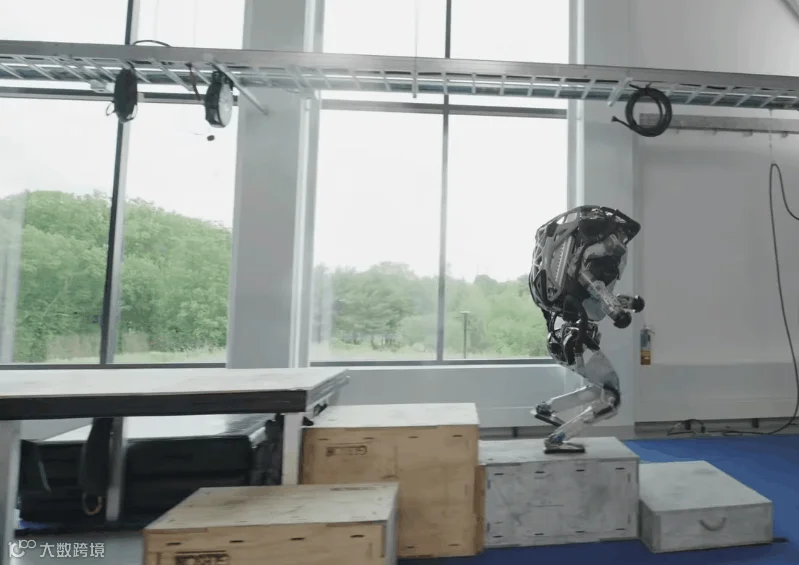
8月17日,美国机器人公司“波士顿动力”公布了一段旗下人形机器人Atlas的最新视频,大家都看了吧,没看的赶紧补上。
的确很厉害,我也看到很多媒体都对Atlas不吝赞美之词,Atlas在领先的路上也是一路小跑,甩开了追赶者。
当然,Atlas在跑酷之余,我们也看到了,Atlas伤痕累累的一面。
工程团队由于没有对Atlas机器人加入任何类型的坠落检测功能,Atlas在完成这段视频之前经过不少的测试,失败的次数也着实不少。
有一次,Atlas 错过了跳跃机会,并撞在下一个平台上:

奔跑过程中,Atlas 仿佛发生了液压管线井喷,当倒在地上时,它将液体喷洒地到处都是:
在过程中偶尔也会被障碍卡住脚:

还有一次,当 Atlas 尝试后空翻,台面在 Atlas 的重量之下裂开了,直接头后脑勺着地:

Atlas 的运动是由感知驱动的。以前,机器人只能在平坦的表面或固定的盒子上进行预编程的跑酷,但 Atlas 现在使用 RGB 摄像头和深度传感器检测环境并对其做出反应。
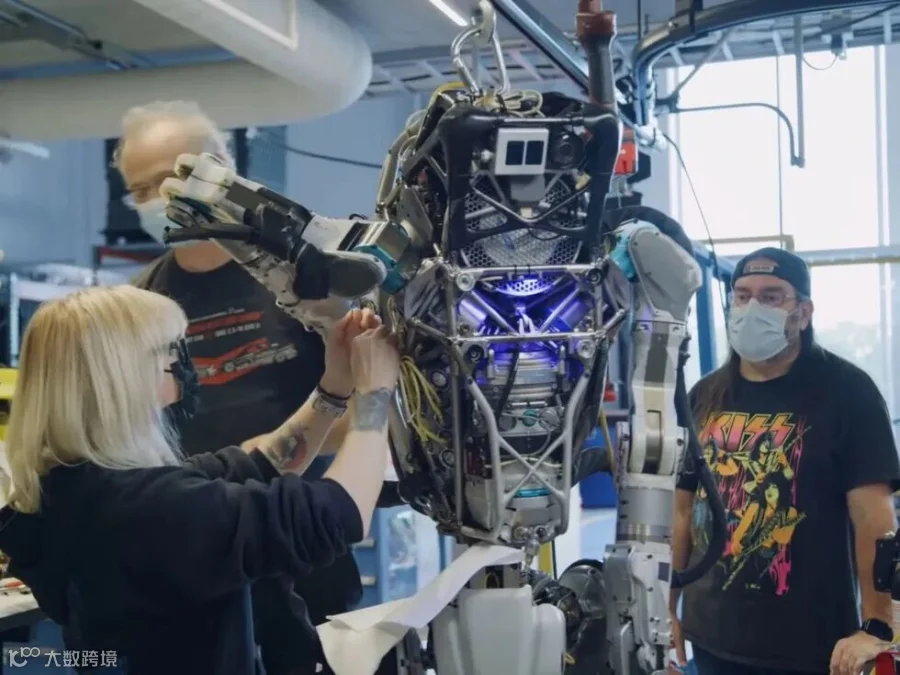 工程师们正在对阿特拉斯进行修复
Atlas高5英寸(约1.5米)、重190磅(约86千克),有28个自由度,配备RGB相机和深度传感器。而且,所有的控制、感知、评估计算需要三台计算机。
工程师们正在对阿特拉斯进行修复
Atlas高5英寸(约1.5米)、重190磅(约86千克),有28个自由度,配备RGB相机和深度传感器。而且,所有的控制、感知、评估计算需要三台计算机。
既要考虑体积和复杂硬件设计,还要考虑其重量比、运行时间、运动范围和物理鲁棒性,我们需在在其找到一个折中的点。
与此同时,机器人控制团队必须创建算法,可以推理这些机器的物理复杂性,以创建一个更适用的协调行为集。
经过5年的进化,Atlas的现在行动是由感觉驱动的。
而此前,是依靠工程师们捕捉各种动态动作,并将它们拼接在一起形成一个例程。
即便这样,在行进过程中,机器人的控制系统仍然需要进行大量调整,以保持平衡。
在跑酷这一动作实现的迭代过程中,机器人根据它所看到的东西调整自己的行为方式,工程师不需要为其可能遇到的障碍预先编制跳跃动作。
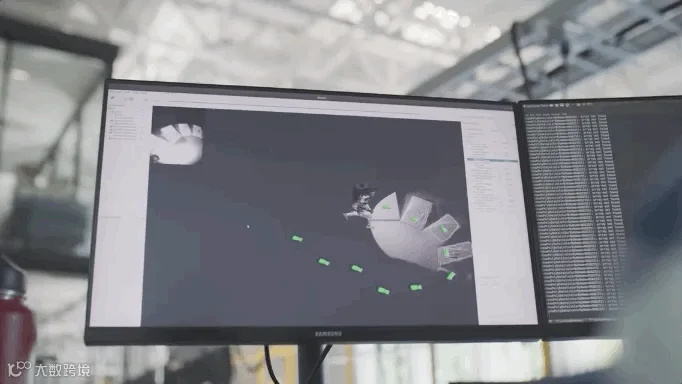
对于 Atlas 控制团队来说,仿真是一个必不可少的开发工具,既可以在机器人测试之前评估新的行为,又可以确保新的软件更改不会对现有的功能产生负面影响。
声明:本文所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容!
联系人:詹老师
联系电话:18144394343
联系邮箱:215114314@qq.com

你知道工业机器人是怎样制造出来的吗?
由于微信公众号变更推送机制,您可能会看不到我每天的文章更新。请点击我的公众号右上角三个点,将我设为"星标"朋友,每天最新文章就能及时呈现给您。