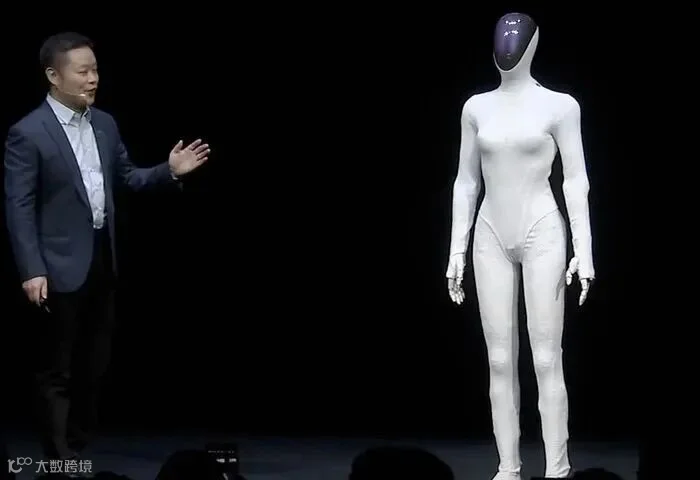
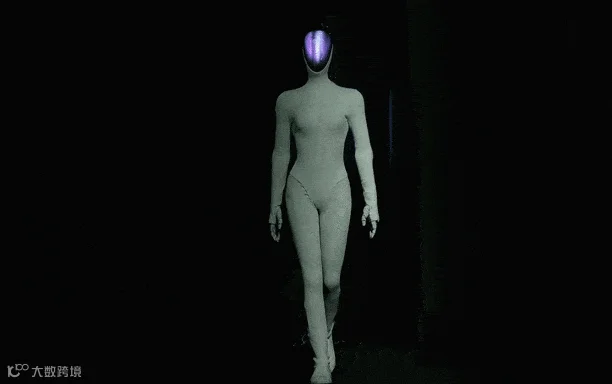
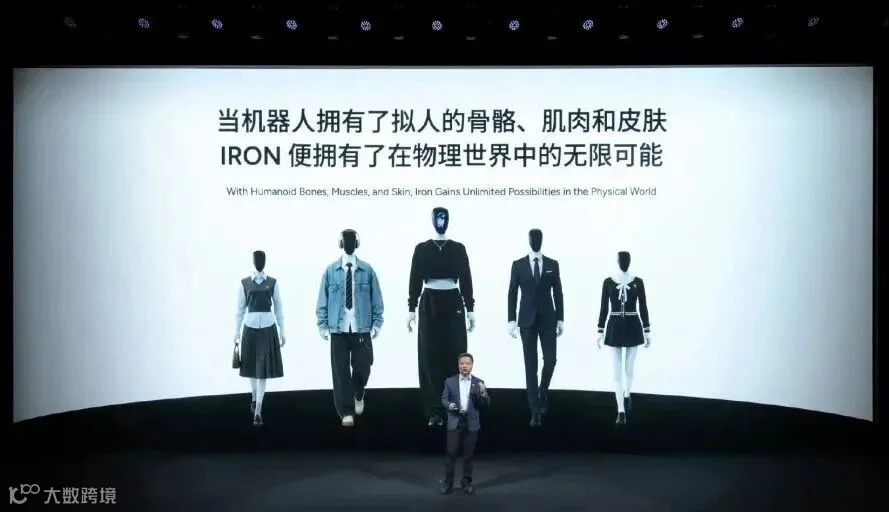
11月5日,在小鹏科技日的舞台上,一款名为IRON的新一代人形机器人的登场,引发了远超预期的全网关注。它不仅以其高度拟人的女性形态和优雅流畅的“猫步”行走姿态征服了观众,更因拟真度极高而引发了一场“机器人内是否藏有真人”的趣味性质疑。为了回应,小鹏汽车董事长兼CEO何小鹏先生做出了一次在机器人发布史上堪称壮举的现场验证——在IRON通电运行状态下,当众剪开了其腿部的覆盖件,将内部精密而复杂的结构公之于众。
这一剪,剪开的不仅是机器人的“皮肤”与“肌肉”,更是揭开了人形机器人背后一项关键制造技术的面纱:3D打印弹性晶格结构,正成为塑造仿生肌肉的核心答案。
仿生新高度
从“形似”到“神似”的跨越
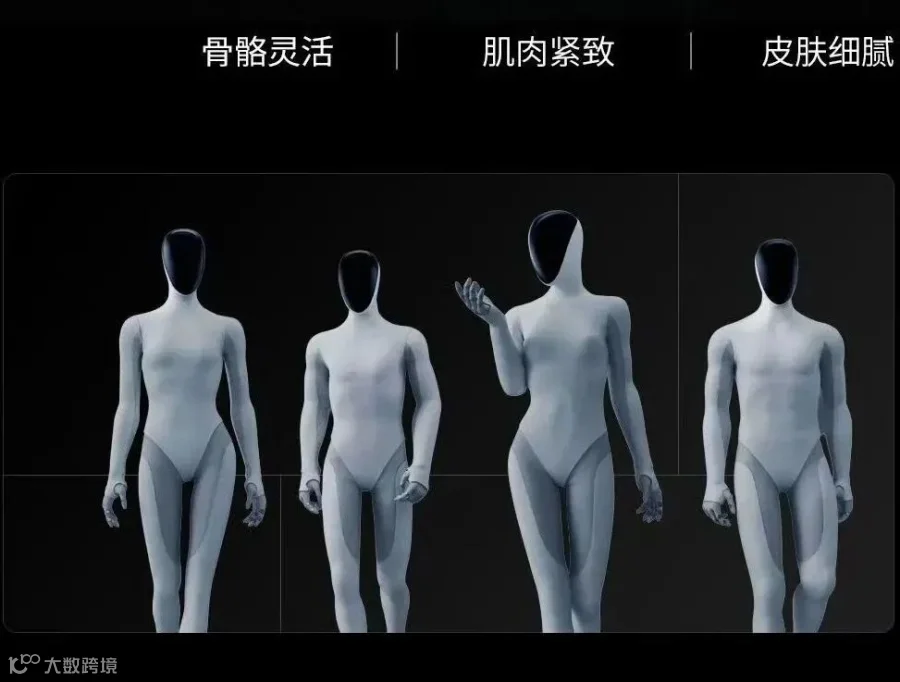
IRON的设计理念是“由内而外”的彻底仿生。它采用了“骨骼-肌肉-皮肤”的三层递进架构:

骨骼系统
仿人脊椎设计,支撑其灵活的弯腰、转身等复杂姿态。

肌肉系统
这正是技术的核心。IRON并未使用传统的电机堆砌或刚性连杆,而是通过3D打印的弹性晶格材料来模拟人体肌肉的柔软、缓冲与力量感。

皮肤系统
全包覆的柔性皮肤,提供了视觉上的逼真感和安全的交互体验。
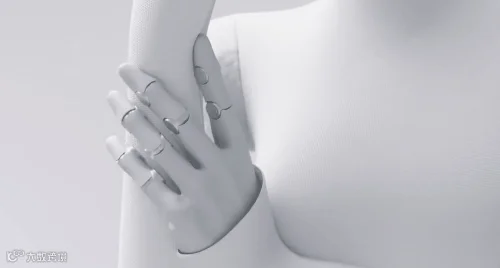
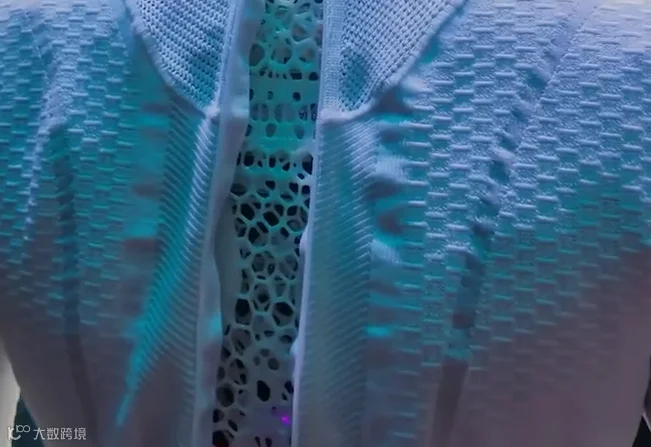
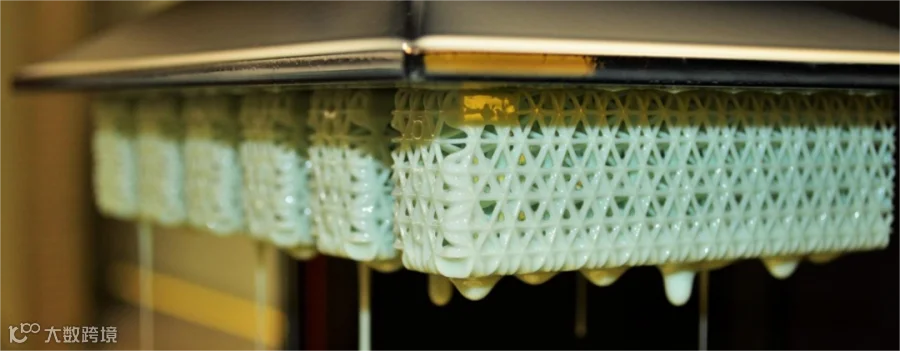
IRON机器人外包裹皮肤之下的的仿生晶格展示
当剪刀划过,露出的不是冰冷的齿轮与电机,而是密密麻麻、规则排列的蜂窝状晶格结构。这一结构,正是IRON能够实现近乎真人般柔和、连贯运动的核心奥秘。这项技术的精妙之处在于能根据不同形体,生成个性化的3D晶格拓扑结构。这意味着,未来的IRON可以像真人一样拥有不同的体型曲线,实现从“标准化生产”到“个性化定制”的飞跃。

技术必然
为何必须是3D打印?
几何编程
以单一弹性材料实现尺度性能
生物体内,从柔软的脂肪到坚硬的骨骼,其刚度跨越了近九个数量级。传统的多材料复合方案存在界面易失效、工艺复杂等问题。而IRON所采用的是通过编程改变几何结构,不更换材料。通过3D打印,单一弹性材料可以覆盖从kPa到数百kPa的范围,足以满足软体躯干和刚性骨骼的需求。
通过“拓扑调控(TR)”和“叠加编程(SP)”等算法,单一的光固化弹性树脂可被设计成百万种力学性能各异的晶格。通过调节晶格类型、密度和方向,可以在同一次打印中,让材料在某些区域像海绵一样柔软,在某些区域则像肌腱一样强韧,完美覆盖从软组织到结构组织的刚度需求。
几何自由
传统制造无法实现复杂渐变结构
仿生肌肉的核心是复杂的三维空间结构。传统制造工艺如铸造、注塑或切削,在面对如此复杂的内部分级渐变结构时几乎无能为力,无法在实体内部实现任意、连续的性能分布。

唯有3D打印能彻底摆脱这一几何束缚。无论是EPFL大象机器人通过混合BCC和XCube晶格实现的拓扑渐变,还是NASA的HULK项目通过改变Gyroid晶格相对密度实现的密度渐变,都完全依赖于3D打印独有的、在三维空间中自由定义每一点属性的能力。这种无与伦比的几何自由度,是将理想的仿生结构从数字模型变为物理现实的唯一途径。
光固化技术
在精度与质量上构成最优解
a.微米级精度:商用光固化设备分辨率可达数十微米,足以完美成型梁厚度仅0.5-1.5毫米的复杂晶格,这是保证结构力学性能的基础,对于机器人运动的精准控制至关重要。
b.卓越表面质量:光固化打印件表面光滑,避免了FDM的台阶效应和挤出式的应力集中点,从而大幅提升了晶格结构的疲劳寿命。这对于需要承受千万次往复形变的仿生肌肉而言,能显著延缓裂纹萌生,大幅提升构件的长期使用可靠性。
c.极致设计自由:光固化技术能够一次性成型包括悬浮特征、连续渐变拓扑场、内部腔体在内的几乎所有可数字建模的形状,这是实现“由内而生”仿生设计的唯一可行路径。这使得仿生肌肉不再是一个孤立的零件,而是集结构、潜在传感与驱动功能于一体的一体化系统,为未来机器人的智能化奠定了基础。
未来已来
商业化路径与行业意义
IRON的亮相,其意义远超一款产品的发布。它标志着中国科技企业正从依赖成本优势向引领硬科技创新转变。在“物理AI时代”的开幕时刻,IRON代表了AI从虚拟世界进入现实物理世界的核心载体。它证明,通过3D打印等先进制造技术与人工智能的深度融合,我们正在一步步将高度拟人、具备实用价值的人形机器人从科幻带入现实。
当何小鹏先生剪开IRON腿部的那一刻,他证明的不仅仅是机器人的“清白”,更是开启了一扇通往人形机器人规模化、个性化生产的大门。3D打印技术,特别是光固化弹性体,凭借其独特的几何编程能力、设计自由度和成熟的工艺,已然成为塑造机器人“肌肉”骨骼不可或缺的基石。随着2026年底其量产目标的推进,一个由3D打印赋能、高度仿生的人形机器人时代,正加速照进现实。