具身人工智能领域正经历以视觉为中心的感知范式转型。作为信息密度最高且最契合自然人机交互的模态,视觉是解锁通用机器人智能与实现仿真到真实迁移的核心。然而,研究者长期面临"看得真"和"训得快"的取舍困境:高保真渲染带来巨大计算开销,人工建模效率低下,平台兼容性限制创新边界。
为突破这些瓶颈,清华大学智能产业研究院(AIR)DISCOVER Lab联合谋先飞技术、原力灵机、求之科技和地瓜机器人,推出GS-Playground通用多模态仿真框架。该成果已被机器人领域顶会RSS 2026录用。

Fig.1 GS-Playground框架示意图
通用全场景原生兼容:构建统一仿真训练底座
平台搭载自研跨平台并行物理引擎,原生支持CPU/GPU双后端与全操作系统,无缝适配四足机器人、人形机器人及工业机械臂等全品类机型。全面覆盖机器人运动控制、自主导航、高精度操作三大核心场景,且API完全兼容行业通用的MuJoCo MJCF格式,实现现有项目的零摩擦迁移。
自研高性能并行物理引擎:保障接触密集型学习
平台采用广义坐标下的速度-冲量动力学公式,将接触与摩擦统一建模为混合互补问题(MCP),通过投影高斯-赛德尔求解器实现稳定求解。相比传统方案,该设计显著提升静摩擦保持能力与时间步稳定性,特别适用于足式运动及抓取任务。创新引入约束岛并行化与接触流形热启动机制,使密集堆叠场景的求解迭代次数从50+降至10次以内。
实测验证:Franka Panda动态抓取测试中,GS-Playground CPU版在0.002s/0.01s时间步下均实现100%保持成功率;27自由度人形机器人基准测试中,50机器人并行场景下CPU版吞吐达1015 FPS,较MuJoCo提速32倍。
内存高效Batch 3DGS渲染:破解保真度与效率矛盾
平台首创高效剪枝策略,减少90%高斯点数量的同时保持PSNR指标无感下降(<0.05dB)。批量3DGS渲染器实现多场景并行处理,单张RTX 4090 GPU在640×480分辨率下突破10000 FPS吞吐量,支持2048场景同步渲染。刚性连杆高斯运动学机制确保视觉表征与物理对象位姿实时同步,消除动态场景伪影问题。
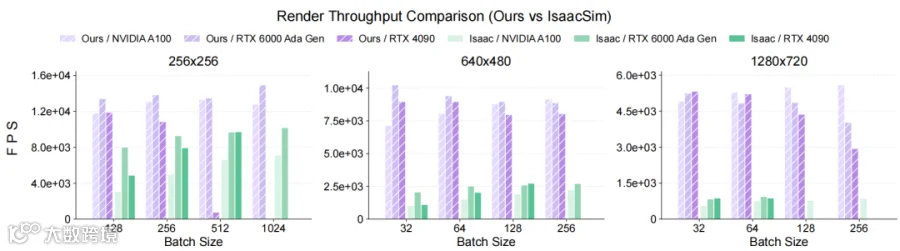
Fig.2 渲染吞吐量对比:GS-Playground vs IsaacSim光追渲染器
自动化Real2Sim工作流:降低场景构建门槛
平台实现"图像到物理"全流程自动化:输入单张RGB图像,数分钟内生成仿真就绪数字资产。工作流包含目标分割、背景补绘、三维高斯重建等环节,构建了Bridge-GS标准数据集。在InteriorGS数据集上的验证表明,该方案对不同室内场景具有强泛化能力。
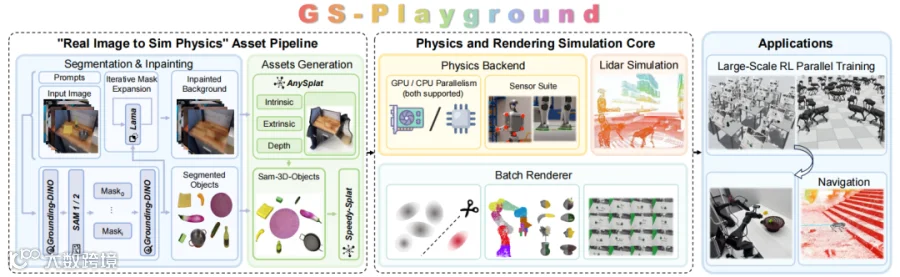
Fig.3 GS-Playground系统架构(左:图像到物理管线;中:仿真核心;右:下游应用)
全链路端到端验证:实现零微调仿真迁移
平台完成从场景重建到真机部署的闭环验证。视觉驱动策略无需微调即可直接部署:四足/人形机器人运动策略实现zero-shot部署;视觉导航任务达成零样本迁移;机械臂抓取任务真实场景成功率达90%。
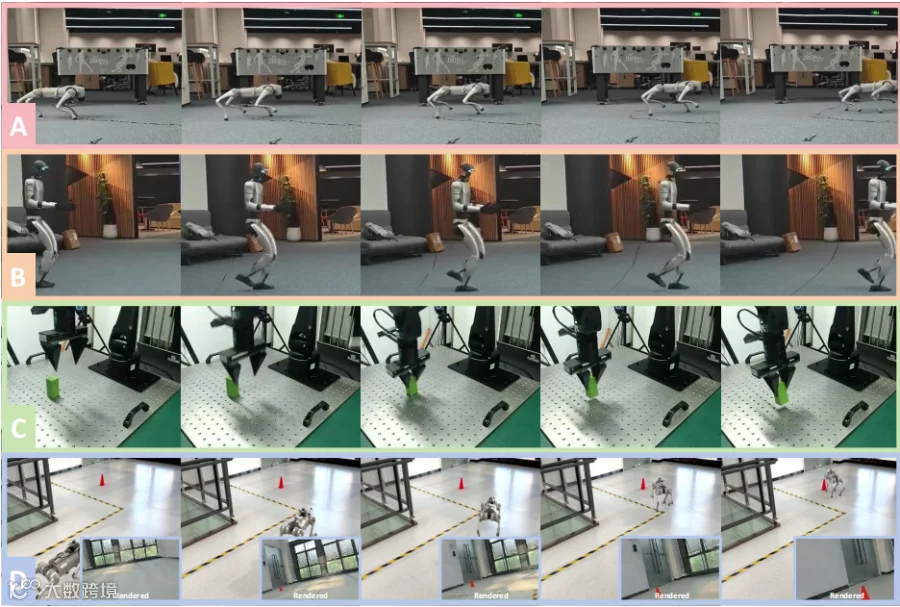
Fig.4 GS-Playground训练策略在真实机器人的部署效果
开源赋能:推动具身智能创新
作为行业首个融合高吞吐物理仿真与高保真批量3DGS渲染的全栈框架,GS-Playground从根源突破算力、显存与资产生成瓶颈。团队将正式开源全栈框架,提供高性能、易用的核心基础设施,加速视觉驱动机器人学习的产业落地。
项目主页:
https://gsplayground.github.io
论文链接:
https://arxiv.org/abs/2604.25459
代码仓库:
https://github.com/discoverse-dev/gs_playground