
点击关注▲ “邦纳”,开启智造之旅
机器人视觉定位的应用已经是一个比较成熟的应用,在该应用中,坐标系的转换是非常重要的一个环节,其标定的精度直接决定了最终使用效果,下面针对6轴机器人的坐标系来做一个梳理。

机器人的三种坐标系

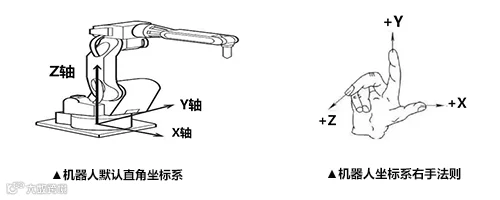
机器人出厂默认的直角坐标系原点定义在机器人轴线与机器人2轴水平面的交点。默认直角坐标系的方向规定:X轴方向向前,Z轴方向向上,Y轴方向根据右手定则确定。不管机器人处于什么位置,均可沿设定的X 轴、Y 轴、Z 轴平行移动。
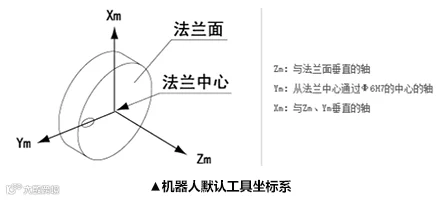
机器人默认的工具坐标系是把机器人腕部法兰盘所持工具的有效方向作为Z轴,尖端点为6轴法兰盘的中心点。
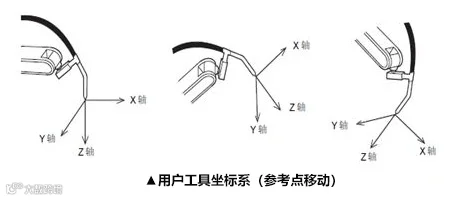
实际应用中,机器人在6轴上需要安装相关的夹具或抓手,这就需要标定用户的工具坐标系,将工具坐标参考点从6轴法兰盘的中心点挪到工具抓手的尖端点。
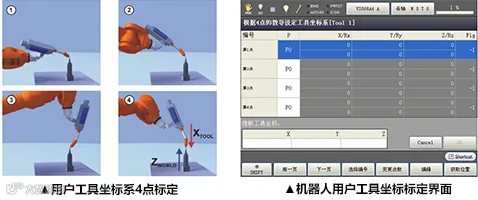
工具坐标系标定常用4点法标定,在机器人附近找一点,让工具中心点对准该点,保持工具中心点调整夹具的姿态,共记录四次,即可自动生成工具坐标系的参数。
实际应用中,机器人的工作平面与机器人直角坐标系的基准面存在位置偏差(例如工作平面是一个斜面),为了高效的控制抓手移动,需要针对工作平面来示教用户工件坐标系。
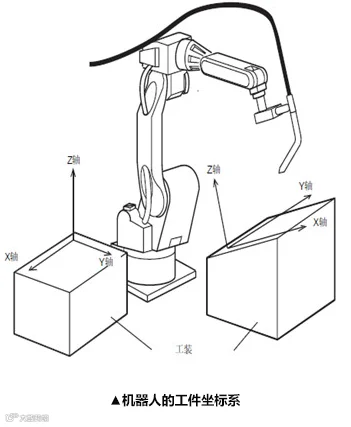
用户工件坐标的标定一般通过3个示教点来实现,第一个示教点是用户工件坐标系的原点;第二个示教点在X轴上,第一个示教点到第二个示教点的连线是X轴,方向为X正方向;第三个示教点在Y轴的正方向区域内。Z轴由右手手法则确定。


机器人与视觉坐标系的标定

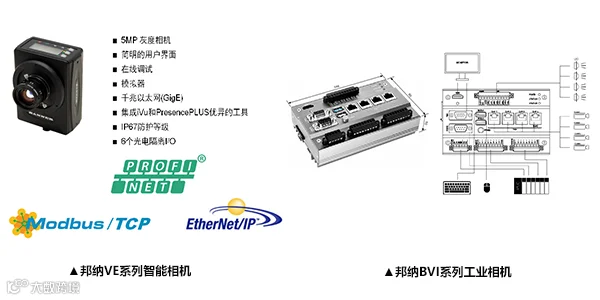
确认好实际应用所需要的用户工具坐标系和用户工件坐标系后,最后一步就是将当下的机器人坐标系和视觉坐标系进行标定。标定完成后,相机就可以直接输出针对机器人坐标系的坐标数据,引导机器人精准定位到工件位置。(邦纳的VE相机和BVI相机均支持机器人坐标系的自动标定。)
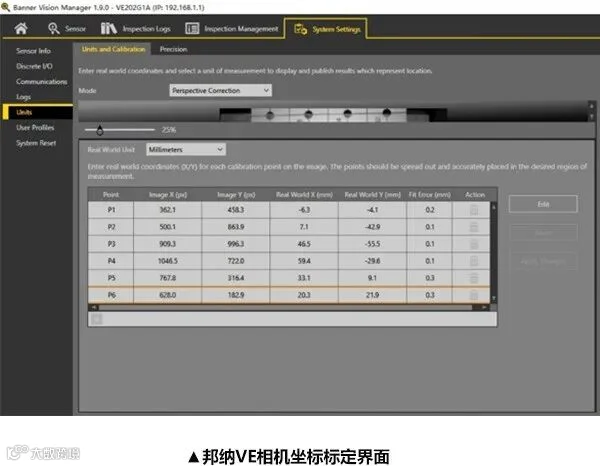
以下是VE相机的坐标系标定界面,VE相机支持最多20个点的手动标定,在标定平面上选取对应参考点,逐一控制机器人的工具抓手移动到对应点,将机器人坐标点填入以下的软件界面表格,然后点击“apply changes”即可。

获得最佳的定位引导精度的关键点

相机支架,机器人抓手支架在工作过程中是否存在晃动或位置偏移。
用户的工件坐标示教的是否合理,尤其是针对不规则的工件表面,工件坐标的基准面是否和相机拍摄的特征基准面一致。
用户工具坐标系示教所选取的参考点与实际抓手的参考点是否存在位置偏差。
与相机进行坐标系标定的时候,机器人调用的用户工具坐标系和用户工件坐标系必须和实际工作的时候一致。
与相机进行坐标系标定的时候,机器人走点时所用的尖状物体或夹具抓手和实际夹具抓手之间的位置换算是否有误差。
 点击底部阅读原文,联系邦纳工程师!
点击底部阅读原文,联系邦纳工程师!
END
近期精彩内容
观看产品视频
进入邦纳微信公众号,点击下方菜单“精彩邦纳”——“产品视频”
订阅电子刊
进入邦纳微信公众号,点击下方菜单“精彩邦纳”——“订阅电子期刊”