
在现代工业生产中,物料搬运是最基础却又最关键的环节之一。传统自动化生产线往往依赖于精确定位的来料,这需要大量人工辅助或昂贵的定位治具。随着制造业向小批量、多品种方向发展,3D视觉引导无序抓取技术应运而生,为智能制造业带来了全新的解决方案。
无序抓取技术概述
3D视觉引导无序抓取是指利用三维视觉系统识别随意堆叠或摆放的工件,通过算法分析确定每个工件的精确位置和姿态,进而引导机器人完成抓取作业的先进技术。与传统的2D视觉相比,3D视觉能够获取深度信息,实现对物体三维空间位置的全面感知。
核心技术组成
一套完整的3D视觉无序抓取系统包含三个关键部分:
三维成像系统:通过激光位移传感器、结构光或双目视觉等技术,获取工件的三维点云数据。这些数据形成了工作场景的数字化映射,为后续分析提供基础。
视觉处理算法:对采集的点云数据进行处理,包括点云滤波、分割、特征提取和匹配等步骤,最终识别出每个工件在三维空间中的位置和姿态。
机器人路径规划:根据视觉系统提供的坐标信息,自动计算机器人的最优抓取路径,避免碰撞并确保稳定抓取。
无序抓取技术的行业应用案例
案例一:汽车零部件上下料
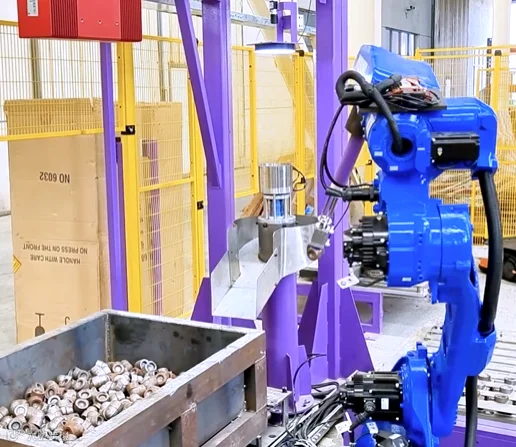
在汽车零部件制造工厂中,多种型号的齿轮、轴套等零件通常以无序状态盛放在料箱中。传统方式需要人工将零件逐个摆放到指定位置,劳动强度大且效率低下。
引入3D视觉无序抓取系统后,机器人能够直接从料箱中识别并抓取不同型号的零件,准确放置到加工设备或传送带上。系统通过点云分析,即使零件互相堆叠、姿态各异,也能精确计算每个零件的抓取点,抓取成功率高达99.5%以上,大大提升了生产效率和自动化程度。
案例二:物流行业快递分拣
物流分拣中心面临的是形状、尺寸、颜色各异的包裹,这些包裹在传送带上位置随机、姿态不一。传统人工分拣效率有限,且劳动强度大。
应用3D视觉引导无序抓取系统后,机器人能够实时识别传送带上每个包裹的位置、尺寸和形状,计算最优抓取点,并将其准确放置到对应的分拣区域。系统通过深度学习算法,能够适应各种新形状的包裹,显著提高了分拣效率和准确率。
案例三:电子元件装配
在电子产品制造中,微小的电子元件通常以散装形式供应,传统上依赖专用振动盘进行排序供料,换产时需要大量调整时间。
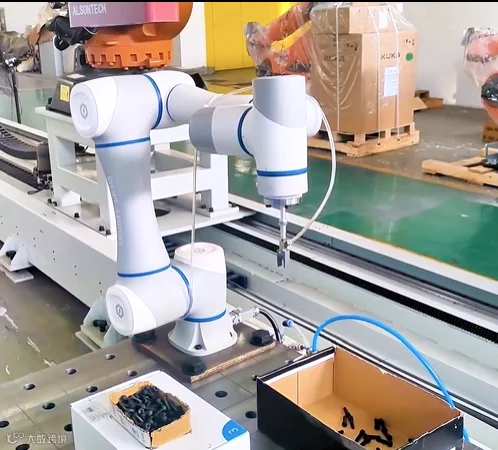
采用3D视觉无序抓取技术后,机器人可直接从托盘中抓取各种规格的电子元件,精确放置到PCB板对应位置。系统通过高精度的3D视觉传感器,能够识别仅数毫米大小的元件,并准确判断其三维姿态,实现微米级的放置精度。
案例四:食品行业自动化生产
食品行业由于产品易损、形状不规则等特点,自动化难度一直较高。例如,在烘焙食品生产中,形状不规则的面包、糕点常常随机摆放在冷却架上。
通过3D视觉无序抓取系统,机器人能够自适应地识别和抓取各种形状的食品产品,并根据其脆弱特性调整抓取力度,将其整齐摆放到包装盒中。系统采用卫生型设计,符合食品行业标准,既保证了产品完整性,又大幅提高了包装效率。
技术优势与实施要点
核心竞争优势
3D视觉引导无序抓取技术相比传统自动化方案具有明显优势:
高度柔性:无需精确定位工装,能够适应不同形状、尺寸的工件,快速响应生产变化。
降低硬件成本:省去了昂贵的定位设备和专用工装,减少了硬件投入和维护成本。
提升生产效率:实现了真正意义上的全自动上下料,减少人工干预,提高设备利用率。
增强系统智能性:通过机器学习算法,系统能够不断优化识别和抓取策略,提高作业精度和效率。
实施关键因素
成功部署3D视觉无序抓取系统需要考虑多个因素:
视觉系统选型:根据工件特性、工作距离和精度要求,选择适合的3D视觉技术。对于高反光工件,需考虑抗反光能力强的视觉系统。
算法优化:针对特定应用场景优化识别算法,平衡处理速度和准确率的要求。复杂场景可能需要结合深度学习方法。
机器人集成:确保视觉系统与机器人的通信稳定可靠,优化轨迹规划算法,避免奇异点和碰撞。
环境适应性:考虑工业现场的温度、振动、光照变化等因素,确保系统在各种条件下稳定运行。
技术发展趋势
随着人工智能和硬件技术的进步,3D视觉引导无序抓取技术正朝着更智能、更精准、更快速的方向发展:
深度学习融合:传统算法与深度学习相结合,提高对复杂背景和重叠工件的识别能力。
实时性提升:新一代硬件加速技术使点云处理速度大幅提升,满足高速产线的节拍要求。
多机器人协同:多个视觉引导机器人协同作业,解决更复杂的抓取任务。
易用性改进:图形化编程和示教方式降低使用门槛,使系统部署更加便捷。

结语
3D视觉引导无序抓取技术正在重塑工业自动化的边界,为制造业提供了前所未有的柔性和智能化水平。从汽车制造到物流分拣,从电子装配到食品加工,这项技术正在各个领域证明其价值。
随着工业4.0的深入推进,3D视觉无序抓取将成为智能工厂的标准配置,帮助企业在日益激烈的市场竞争中构建核心竞争力。无论您是设备制造商、系统集成商还是终端用户,掌握这项技术都将为您开启智能制造的新篇章。