
引言
在机器人自主导航与精准操作任务中,3D视觉引导技术通过提供环境的三维信息,成为机器人感知与决策的重要依据。然而,机器人运动学模型误差会显著影响3D视觉引导的最终性能,导致定位偏差、操作失准等一系列问题。因此,对运动学模型误差进行深入的解析分析,是提升机器人系统精度的关键。
1. 误差来源与特性分析
在3D视觉引导系统中,误差主要来源于四个重要方面:
1.1 视觉感知误差
基于单目相机的深度计算误差会随着与相机基线距离的增加而发生显著变化。在靠近基线的区域,深度误差可能极大甚至无限大,这主要是由深度计算中的三角测量退化引起的。这种不可信区域若与机器人运动方向重叠,极易导致导航失败或碰撞。
1.2 机器人本体误差
机器人自身的运动学参数不准确会直接导致绝对定位精度下降。这种误差在机器人工作空间中的分布并不均匀,表现为某些区域误差较大,而另一些区域误差较小。运动学误差会使得机器人末端执行器的实际位置与理论计算位置存在偏差,即使3D视觉系统提供了准确的环境信息,这种偏差也无法避免。
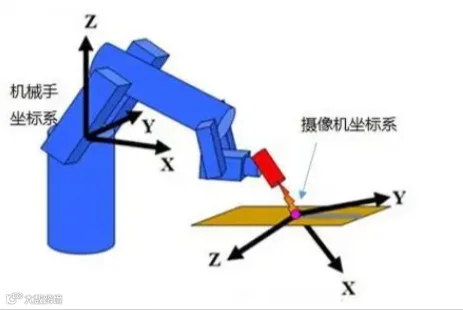
1.3 手眼标定误差
3D视觉传感器坐标系与机器人基坐标系之间的转换关系需要通过手眼标定来确定。标定过程中存在的微小误差会随着机器人的运动被进一步放大,特别是在大范围工作空间内,这种误差放大效应更为显著。
1.4 环境干扰与算法局限性
实际工业环境中的信息干扰(如遮挡、噪声、不规则特征等)会降低特征识别的准确性。传统视觉算法在应对这些干扰时,往往需要在识别准确性和提取精度之间进行权衡,难以同时保证两者的最优。
2. 误差建模与分析方法
2.1 深度误差建模
针对单目视觉的深度误差,可以建立预测性深度误差模型,该模型作为运动参数的函数,能够预测不同位置上的深度计算误差。通过设定误差阈值,可以确定视觉引导中的"不可信区域",为机器人运动规划提供避障依据。
2.2 运动学参数辨识
利用双目视觉系统测量机器人末端在不同位置的实际坐标,与理论坐标进行对比,构建距离误差函数。采用优化算法迭代求解运动学参数误差,对机器人运动学模型进行精确校正。
2.3 空间误差补偿建模
考虑机器人工作空间中误差分布的复杂性,可以建立附带动静约束的误差传递函数。通过分析定位点与参考点在距离和方向上的相关性,构建各向异性的相似度模型,实现针对不同空间位置的方向性误差补偿。
3. 误差传递与影响机制
在3D视觉引导系统中,误差会沿着感知-决策-执行的数据流传递和累积:
3.1 视觉测量阶段
3D视觉传感器获取的环境信息本身存在误差,如点云坐标的不确定性。
3.2 坐标转换阶段
手眼标定误差会将视觉测量误差进一步放大,影响视觉信息向机器人坐标系的准确映射。
3.3 运动规划阶段
基于含误差的环境信息和不精确的机器人模型生成的路径,会继承并可能放大前期误差。
3.4 执行阶段
机器人运动学误差使得实际轨迹偏离计划轨迹,导致最终定位精度下降。
这种多阶段的误差传递机制使得系统总误差远大于单个环节的误差,呈现出复杂的非线性特性。
4. 误差补偿与系统优化策略
4.1 自适应视觉伺服控制
对于未标定的3D立体相机系统,可以设计基于图像雅可比矩阵的自适应视觉伺服控制方案。该方法通过在线估计相机参数和机器人模型,能够在未知动力学参数的情况下实现精确的3D视觉运动跟踪,对环境变化具有强鲁棒性。
4.2 混合误差补偿方法
结合基于规则的传统方法和数据驱动方法的优势,在保证边缘特征提取精度的同时,提高对干扰数据的识别准确性。这种混合方法能够有效解决识别精度与提取精度之间的固有矛盾。
4.3 多模态特征融合
除了传统的边缘特征,还可以利用支持向量机分类模型识别和分类正确与错误的动作。通过对比分析,为运动校正提供反馈,这种方法在动作识别率上表现出色。
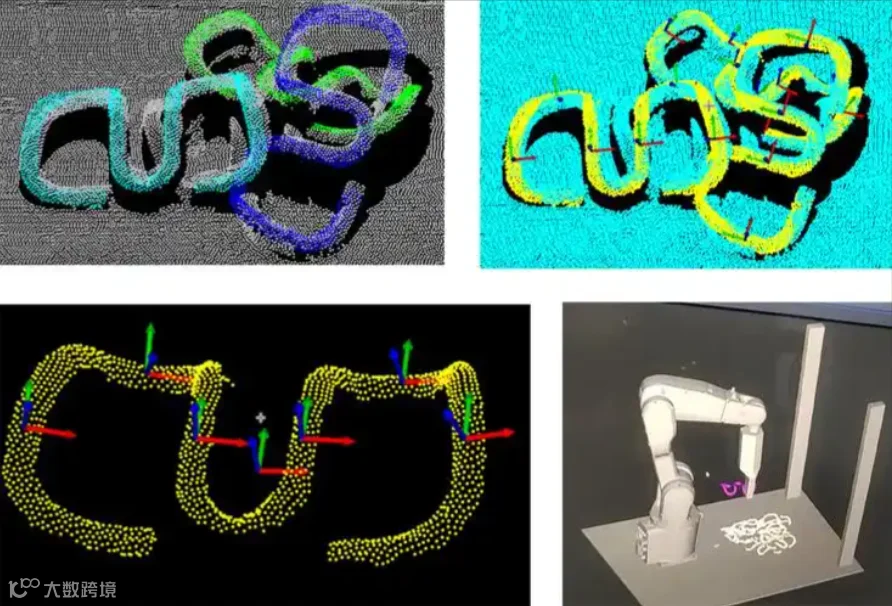
4.4 三维重建后处理优化
针对视觉导航中的三维重建误差,建立误差分析模型并采取误差补偿措施,能够有效提高三维重建的精度和鲁棒性,为后续的视觉引导提供更准确的环境模型。
5. 结论与展望
5.1 主要结论
3D视觉引导中的机器人运动学模型误差是一个复杂的多源误差综合问题,涉及视觉感知、机器人本体、坐标转换和环境干扰等多个方面。通过建立精确的误差模型,分析误差传递机制,并采取针对性的补偿策略,能够显著提高机器人系统的整体精度和鲁棒性。
5.2 未来展望
未来的研究重点将放在三个重要方向:首先是自适应在线误差补偿技术的深入研究;其次是多传感器融合优化方法的创新;最后是深度学习在误差建模中的应用探索。这些研究方向将进一步提升3D视觉引导系统在非结构化环境中的适应性和可靠性。