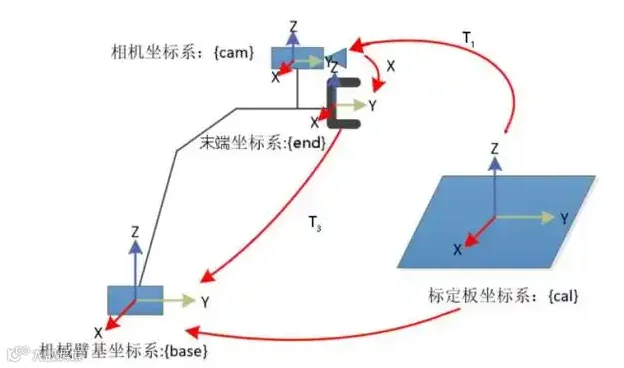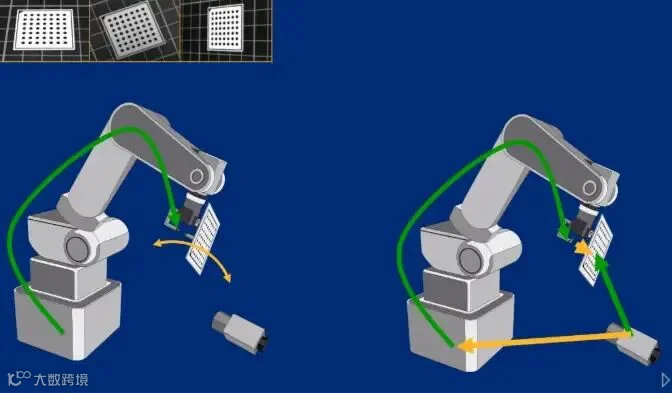
1.手眼标定(Eye-in-Hand / Eye-to-Hand)精度:
细节:将3D相机坐标系精确地转换到机器人底座坐标系的过程。即使使用高精度的标定板,标定误差也会在机器人工作空间的边缘被放大。
技术挑战:标定过程的每个环节(标定板本身的制造精度、相机图像的分辨率、机器人自身的绝对定位精度)都会影响最终结果。需要一个闭环的、基于实际抓取/测量反馈的标定验证和补偿流程。
2.环境光与温度稳定性:
细节:强烈的环境光(尤其是变化的日光或工厂照明)会淹没结构光或激光信号。工业现场的振动、灰尘、油污以及温度波动都会影响光学系统的机械结构和光学元件的性能。
技术挑战:必须设计坚固的防护外壳,采用主动冷却或恒温控制,并尽可能使用970nm等不可见近红外光作为光源以减少环境光干扰。
3.点云数据处理链路的延迟:
细节:从相机采集原始数据,到传输至工控机,再到算法处理并输出结果,整个链路存在延迟。在高速生产线(如每分钟处理上百个工件)上,这种延迟可能导致系统无法使用。
技术挑战:需要优化整个链路:选择低延迟的相机接口(如GigE Vision with GVSP, 10GigE, CoaXPress),使用带FPGA的相机进行前端预处理,以及在工控机上对核心算法进行高度优化(如使用CUDA加速)。