
应用流程
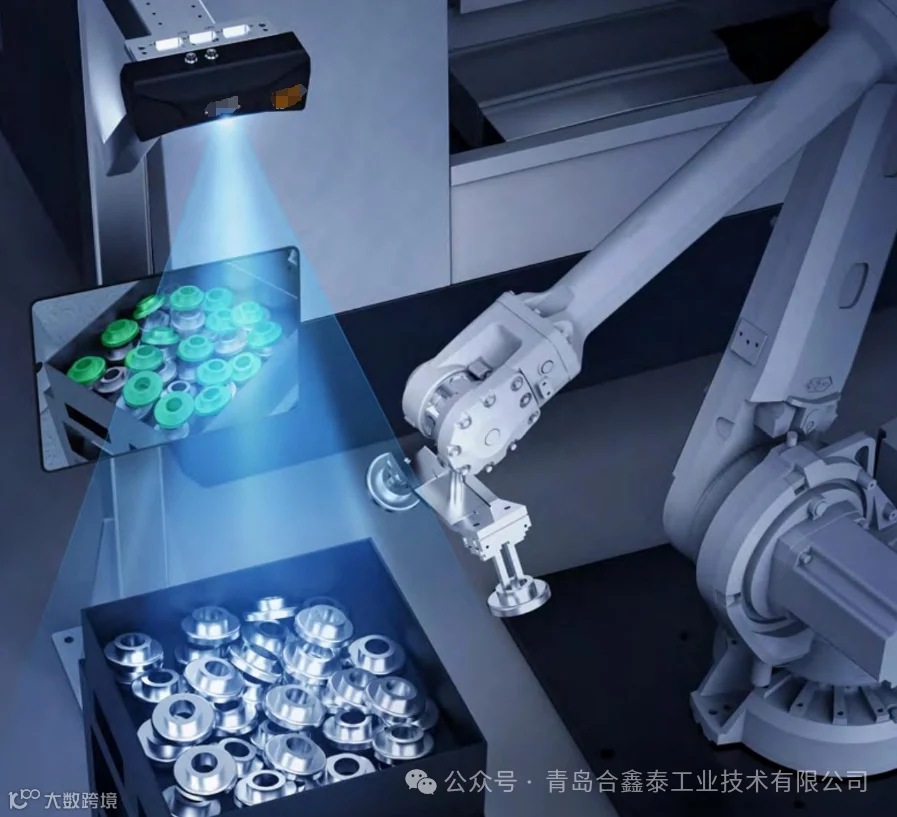
• 上料环节:协作机器人首先通过视觉系统或其他传感器识别待加工的毛坯件位置和姿态,然后利用末端执行器精准抓取毛坯件,按照预设路径将其搬运至机床的指定装夹位置,与机床的装夹装置配合完成毛坯件的装夹定位,为机床加工做好准备。
• 下料环节:机床完成加工任务后,协作机器人收到信号,再次运动至机床加工区域,松开装夹装置,抓取已加工好的成品件,将其从机床工作台上取下,并搬运至指定的卸料位置,完成下料操作。
优势
• 提高生产效率:可实现24小时不间断上下料,且动作迅速、精准,减少了人工上下料的时间损耗,提高机床利用率,进而提升整体生产效率。
• 提升加工精度:能保证每次上下料的位置精度,使毛坯件在装夹时的定位更加准确,有助于提高加工精度,减少因人工操作导致的定位误差。
• 增强安全性:通过安全传感器和控制系统,可在靠近人体时自动降低速度或停止运动,避免与操作人员发生碰撞,保障人员安全,同时也降低了人工操作在机床运行时的风险。
• 降低劳动强度:将工人从重复、繁琐的上下料工作中解放出来,使其能够专注于更有价值的工作,如机床调试、质量检测等,改善工人的工作环境和劳动条件。

面临的挑战
• 复杂工件的适应性:对于形状复杂、重量较大或表面不规整的工件,协作机器人的抓取和定位难度较大,需要开发更先进的抓取技术和自适应算法,以确保上下料的准确性和稳定性。
• 系统兼容性:需与不同品牌、型号的机床进行集成,可能会面临通信协议、接口标准等兼容性问题,需要投入大量时间和精力进行系统调试和优化。
• 成本与投资回报:虽然协作机器人的价格逐渐降低,但初始投资仍然较高,对于一些中小企业来说,需要综合考虑成本与投资回报,合理规划应用方案。