
引言
随着工业自动化向柔性化、智能化方向升级,3D视觉无序抓取技术成为解决散乱工件分拣、上下料等场景难题的核心手段。然而,实际应用中仍存在诸多痛点,如工件姿态复杂、识别精度不足、抓取效率低、碰撞风险高等。本文结合技术创新与行业案例,分析其如何通过软硬件协同优化攻克这些挑战。
一、核心痛点与行业需求
1. 复杂场景的感知难题
在无序堆叠、多材质/反光工件场景中,传统2D视觉难以准确获取三维空间信息,导致识别失败率上升。例如,活塞杆因形状和姿态差异易被误判正反方向,影响抓取精度。此外,深框抓取时夹具易与料框碰撞,工件贴壁残留等问题频发。
2. 效率与节拍瓶颈
生产线对抓取节拍要求苛刻(如2秒/件),但传统方案因扫描速度慢、数据处理延迟难以达标。例如,料框堆叠工件需多次扫描,耗时显著增加。
3. 柔性化与通用性不足
传统工装夹具依赖固定程序,无法适应多品种、多规格工件切换。例如,物流分拣场景中,20余种铝合金小件需快速分类,但传统视觉系统难以应对细微差异。

二、技术突破路径
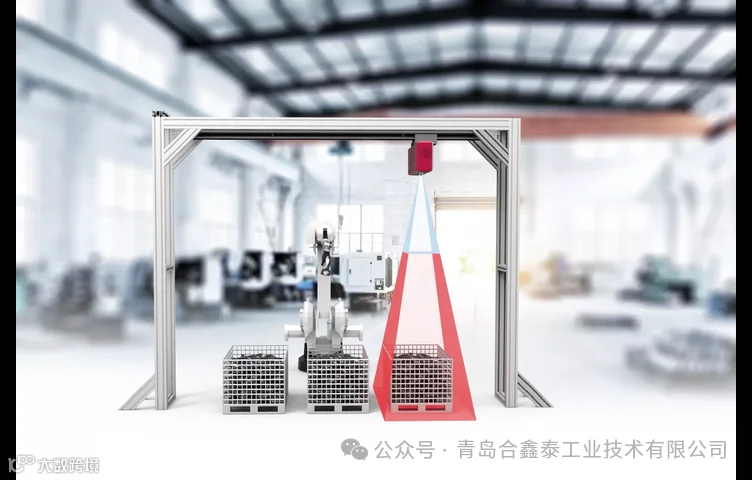
1. 硬件创新:高精度与大视野的平衡
大视野3D相机:采用大视野相机覆盖料框全区域,结合高精度算法(如结构光技术),实现单次扫描输出多个工件坐标,减少重复扫描时间。扫描仪支持2300×1600mm超大视野和1300mm景深,满足五层料框抓取需求,精度达500μm。
抗干扰设计:针对反光、深色工件,通过平行结构光技术或环境光抑制算法,提升点云质量。
2. 软件优化:智能算法与路径规划
AI+三维复合匹配:通过多TCP规划、姿态重置等策略,动态调整抓取位姿,清筐率达99%。
实时避障与轨迹优化:基于离线仿真环境,预演抓取路径,规避机器人奇异点、超程及碰撞风险。
深度学习赋能:引入AI算法,提升复杂形状工件的识别速度与抓取点选择精度,适应多品种混框场景。
3. 全流程仿真与快速部署
离线仿真测试:用户导入机器人模型、工件数模,模拟真实场景并优化抓取策略,降低现场调试成本。
柔性化配置:通过参数化设置(如视野、节拍)适配不同产线需求,例如同一系统可切换抓取多种物料,减少硬件更换频率。
三、行业应用与成效
1. 制造业:提升自动化渗透率
铸造件抓取:某铸造企业采用3D视觉方案,解决了深框贴壁工件残留难题,清筐效率达3秒/件。
汽车零部件分拣:活塞杆抓取方案将生产效率提升30%,产品不良率降低至0.5%以下。
2. 物流与电商:降本增效新引擎
铝合金物料分拣:某物流企业通过3D视觉+协作机器人系统,实现20余种小件分拣,错误率低于0.1%,人力成本减少70%。
拆垛码垛:支持高速识别(3帧/秒)与轨迹避障,满足电商包裹分拣的节拍要求。
3. 新兴场景拓展
3D视觉技术已延伸至喷涂、装配等领域。例如,3D视觉引导涂胶系统可适应曲面工件,提升喷涂均匀性。
四、未来趋势与挑战
技术融合:5G与边缘计算加速数据处理,结合数字孪生实现实时动态优化。
标准化与成本控制:推动硬件模块化设计(如相机、控制器),降低中小企业的部署门槛。
跨行业复制:从工业向农业、医疗等领域扩展,例如手术器械分拣或果蔬采摘。
结语
通过硬件性能提升、算法智能化、全流程仿真三大路径,显著缓解了3D视觉无序抓取的核心痛点。未来,随着技术迭代与生态协同,该技术将进一步推动制造业与物流业的智能化升级,成为工业4.0时代的关键基础设施。