
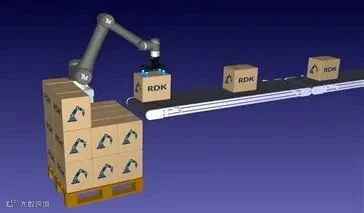
在工业自动化领域,机器人拆码垛作业是物料搬运环节的核心应用之一。它指通过工业机器人,将货物从初始位置(如托盘、生产线)按一定规则取下(拆垛),或反之将货物堆叠到指定位置(码垛)的自动化过程。其中,码垛环节因其直接关乎仓储效率、物流安全及成本控制,对规划的智能性与堆叠的稳定性提出了极高要求。本文将聚焦机器人码垛,深入解析其规划逻辑与稳定性保障这一关键课题。
一、 码垛规划:效率与可行性的算法核心
码垛规划是机器人执行堆叠作业前的“大脑”活动,其目标是生成一套可执行、高效率的堆叠方案。规划的质量直接决定整个工作站的工作节拍、空间利用率和可靠性。规划过程主要解决以下几个核心问题:
模式生成与选择:根据待码放货物的尺寸(长、宽、高)、托盘尺寸及承重限制,规划系统需自动计算并优选堆叠模式。常见的模式包括行列式、骑缝式、旋转交错式等。目标是在保证稳定的前提下,最大化托盘的空间利用率,并尽可能减少货物悬空或超出托盘边界的情况。先进的规划算法能动态调整层与层之间的模式,以适应货物或托盘规格的变化。
路径与序列规划:确定堆叠模式后,需为机器人规划最优的抓取和放置路径。这包括:
避障规划:确保机器人在移动过程中,其臂、末端执行器(抓手)与已堆货物、托盘、周边设备不发生碰撞。
效率优化:规划最短或最平滑的运动轨迹,减少空行程,并与上游物料流(如输送线)节拍匹配,以缩短单循环时间。
抓取点与放置点计算:精确计算每次抓取货物时的最佳受力点,以及放置货物时在目标位置的精确位姿,为稳定性奠定基础。
柔性适应:面对混合规格货物码垛(如不同尺寸的纸箱混托)或来料位置姿态的微小变化,规划系统需具备实时感知与调整能力。这通常需要结合机器视觉系统,识别货物信息并反馈至规划模块,动态重新计算码放方案。
二、 稳定性问题:物理约束与工程实践的焦点
码垛的稳定性是规划方案能否成功转化为安全、可靠物理现实的根本。一个不稳定的垛形在搬运、存储或运输中极易发生倾斜、坍塌,造成货物损坏、人员安全风险和生产中断。稳定性分析贯穿于码垛作业的始终:
静态稳定性分析:这是稳定性评估的基础。主要考量堆叠后整体的重心投影是否始终位于支撑面(托盘底面或下层货物顶面)之内,以及各层货物之间的接触面积、压力分布是否均匀。骑缝码放等方式就是为了增加层间摩擦力与啮合度,防止水平滑动。规划算法必须对每一种生成的模式进行静态稳定性校验。
动态扰动考量:在实际物流环境中,托盘会经历机器人放置时的冲击、输送线启停的惯性力、叉车搬运时的晃动等动态扰动。因此,高鲁棒性的码垛规划不仅考虑静态稳定,还需预留安全余量,如采用“金字塔式”堆叠(下层货物数量多于上层)以降低重心,或确保货物间有足够的摩擦系数以抵抗滑动。
货物特性与抓手适配:货物本身的特性(如包装材料刚性、表面光滑度、内容物是否易变形)极大地影响稳定性。对于软包或易变形容器,不当的抓取力或堆叠压力可能导致形变,进而引发垛形失稳。因此,末端执行器的设计(如夹具形式、夹持力控制、是否有推压机构)必须与货物特性和码垛规划紧密配合,确保抓取牢固且放置时不会扰动已堆货物。
误差累积与补偿:在连续堆叠过程中,机器人定位误差、货物尺寸公差、放置时的微小偏移都可能逐层累积,导致上层货物逐渐偏离理想位置,最终引发失稳。先进的机器人码垛系统通过高精度传感器(如视觉、力觉)进行在线监测与实时位姿补偿,纠正这些偏差,确保长期运行的稳定性。

结论
机器人拆码垛中的码垛规划与稳定性保障,是一个集数学计算、物理力学、控制工程与计算机科学于一体的综合性技术问题。高效的规划算法为机器人提供了“如何码”的智能蓝图,而严谨的稳定性分析与控制则是确保“码得稳”的物理基石。二者深度融合,缺一不可。随着人工智能技术的进步,未来的码垛系统将更加自主、柔性,能够实时处理更复杂的约束条件,在追求极致效率的同时,提供无懈可击的稳定性保障,进一步推动物流与制造业的自动化升级。