
在工业生产的全流程中,物料的上下料环节看似简单,却是连接各工序的关键纽带。无论是原材料从仓储到加工设备的转运,还是成品从生产线到检测区的传送,上下料的效率与精度直接影响整条产线的流畅度。传统模式下,人工上下料不仅面临效率低、成本高、安全性差等问题,还难以适应现代化生产线的快节奏与高稳定性要求。而机器人上下料结合 3D 视觉技术的解决方案,正以其灵活、精准、高效的特点,成为各类制造企业优化物料流转的重要选择,尤其为追求实用与性价比的中小企业提供了切实可行的升级路径。
一、传统上下料模式的共性痛点:生产线效率提升的 “绊脚石”
在工业生产中,上下料环节的问题往往具有普遍性,无论企业规模大小,都可能受其制约:
- 效率瓶颈明显
:人工上下料受体力、注意力、动作频率限制,难以跟上自动化设备的加工节奏。例如,一台数控机床的加工周期为 30 秒,而人工取放物料需 15 秒,直接导致设备利用率不足 70%;当面对小件、轻量工件时,人工频繁重复动作易疲劳,单日有效作业时间甚至不足 6 小时,严重制约产能释放。 - 精度控制不足
:部分加工场景对物料摆放位置有严格要求,如注塑模具的嵌件安装需对准定位孔,偏差超过 0.5mm 就可能导致产品报废。人工操作时,视觉判断与手部动作的误差难以避免,常出现 “放不准、对不齐” 的问题,返工率居高不下,间接增加原材料损耗。 - 成本与安全风险并存
:一名熟练的上下料工人月薪普遍在 5000-8000 元,一条产线若需 2-3 人轮班,年人工成本可达 15-30 万元;同时,搬运重型物料(如金属铸件、大型模具)时,工人易发生磕碰、扭伤等安全事故,企业需承担医疗费用与误工损失,甚至面临生产中断风险。 - 柔性适配性差
:当生产的产品规格变化时,人工上下料虽能通过培训调整操作,但面对多品种、小批量的订单时,切换物料类型的适应速度慢,易出现错放、漏放等问题;而传统机械自动化上下料依赖固定夹具,更换产品时需重新设计制作夹具,成本高且周期长,难以满足灵活生产需求。 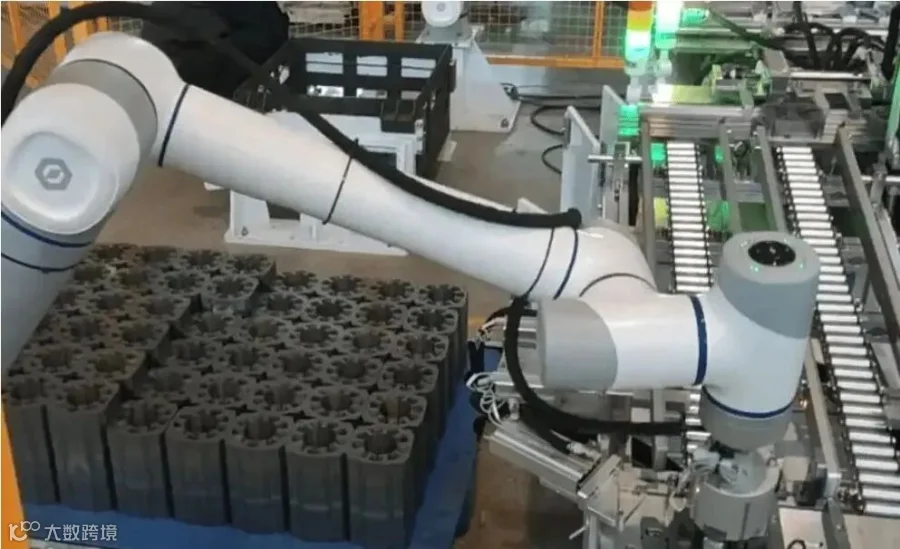
二、机器人上下料的核心优势:贴合工业生产实际需求的解决方案
机器人上下料并非复杂的 “高大上” 技术,其设计理念恰恰是为了贴合工业生产的实际场景,解决传统模式的痛点:
- 效率与设备利用率双提升
:机器人可实现 24 小时连续作业,动作频率稳定且不受疲劳影响。以 CNC 加工为例,机器人上下料时间可控制在 5 秒以内,使设备利用率从 70% 提升至 90% 以上,单日产能增加 30% 以上;同时,机器人可精准配合设备的加工节奏,避免因人工操作延误导致的设备空转,大幅降低单位产品的能耗与时间成本。 - 精度控制直达毫米级
:搭配 3D 视觉系统的机器人,能通过图像识别精准定位物料的位置与姿态,抓取与放置的重复定位精度可达 ±0.1mm,完全满足精密加工对物料摆放的要求。例如,在汽车零部件生产中,机器人可将轴承座精准放入加工设备的定位槽,避免人工放置时的轻微偏移导致的加工尺寸误差,使产品合格率提升 10%-20%。 - 降本与安全双保障
:一套基础的机器人上下料系统(含机器人本体、3D 视觉传感器、抓取工具)初期投入约 10-25 万元,按替代 2 名工人计算,月均节省人工成本 1-1.5 万元,多数企业可在 1-2 年内收回投资;同时,机器人可承担重型物料搬运、高危环境(如高温、粉尘车间)的上下料工作,减少人工接触风险,降低安全事故发生率。 - 柔性适配多品种生产
:机器人通过 3D 视觉识别不同规格、形状的物料,无需更换夹具即可自动调整抓取方式与放置位置。例如,在小家电生产线上,同一台机器人可依次抓取不同型号的电机外壳、底座等零件,切换时间不超过 10 秒,完美适配多品种、小批量的订单需求,避免传统夹具频繁更换带来的成本与时间浪费。 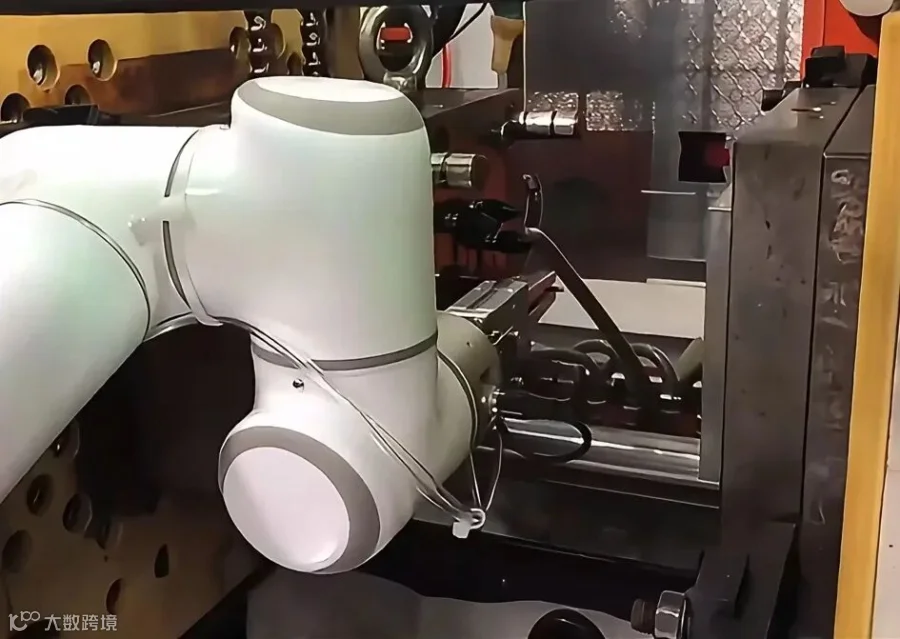
三、3D 视觉赋能:让机器人上下料更 “聪明”
机器人的高效运作离不开 3D 视觉技术的 “加持”,它为机器人提供了精准的 “视觉导航”,解决了上下料场景中的核心难题:
- 精准识别物料姿态
:在仓储或输送带上,物料的摆放往往是无序的,可能倾斜、堆叠或翻转。3D 视觉系统通过激光扫描或结构光成像,可快速获取物料的三维轮廓,识别其空间位置与角度,引导机器人调整手臂姿态,即使物料 “歪放”“倒放”,也能准确抓取。例如,在铸造车间,铸件从传送带送来时姿态随机,3D 视觉能让机器人 “看清” 铸件的抓取点,避免因位置判断错误导致的抓取失败。 - 适应物料外观差异
:部分物料因生产工艺存在细微外观差异(如塑料件的轻微飞边、金属件的氧化色),传统视觉易误判。3D 视觉系统通过深度学习算法,可忽略非关键差异,精准识别物料的核心特征,确保抓取稳定性。例如,在电子元件上下料中,即使电阻、电容的颜色略有差异,系统也能准确区分型号并正确放置。 - 动态补偿环境误差
:生产线的振动、温度变化可能导致物料位置轻微偏移,3D 视觉可实时监测这些变化并反馈给机器人,使其动态调整动作路径。例如,在玻璃制品生产中,传送带的轻微晃动可能导致瓶罐位置偏移,3D 视觉能实时修正机器人的抓取坐标,避免碰撞损坏产品。
四、中小企业应用案例:机器人上下料的实际效益验证
以下案例来自不同行业的中小企业,场景具有普遍性,可直观体现机器人上下料的实用价值:
- 案例 1:五金零件加工的上下料升级
:某生产金属小零件的企业,原有 2 名工人负责 3 台数控机床的上下料,因零件体积小(直径 5-10mm),人工取放耗时且易漏放,设备利用率仅 65%,日产能 800 件。引入机器人上下料系统后,3D 视觉精准识别零件位置,机器人自动抓取并放入机床,单台设备上下料时间从 12 秒缩短至 3 秒,设备利用率提升至 95%,日产能增至 1200 件,减少 1 名工人,年节省成本 8 万元,设备投入 10 个月回本。 - 案例 2:注塑件的自动化取放
:某生产塑料外壳的中小企业,注塑机每 30 秒产出 1 个外壳,人工取件后需放到检测台,存在烫手风险且偶尔因手滑导致外壳划伤,报废率约 3%。采用机器人上下料后,3D 视觉引导机器人从模具中取件并平稳放置到传送带上,避免人工接触导致的划伤,报废率降至 0.5%;同时机器人可 24 小时作业,夜班无需安排工人,月均节省加班费 1.2 万元,14 个月收回设备投资。 - 案例 3:食品包装的物料转运
:某生产休闲食品的企业,需将烘烤后的饼干从烤盘转移到包装机,人工搬运时易因力度不均导致饼干碎裂,损耗率约 5%。引入食品级机器人上下料系统后,3D 视觉识别烤盘内饼干的位置,机器人用柔性抓手轻取轻放,损耗率降至 1% 以下;同时机器人配合包装机节奏,使包装线速度从每分钟 30 包提升至 50 包,日产量增加 40%,满足了订单旺季的交付需求。 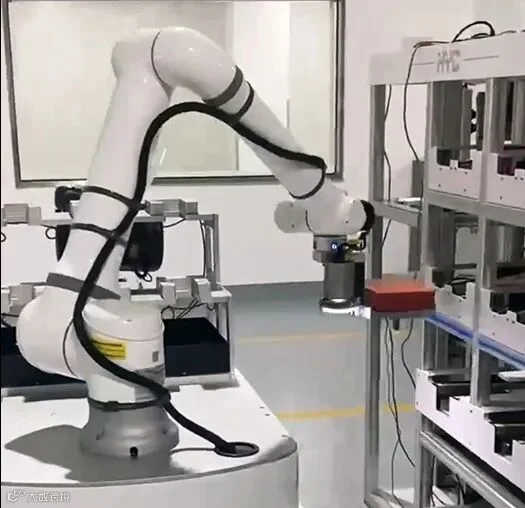
五、机器人上下料的实施要点:中小企业如何高效落地
对于中小企业而言,引入机器人上下料无需复杂规划,可从以下方面着手,确保快速见效:
- 从单一环节切入
:优先选择人工强度大、问题突出的环节(如重型物料搬运、高频次上下料)试点,避免盲目投入。例如,若企业的核心痛点是设备利用率低,可先针对瓶颈设备部署机器人上下料,验证效果后再逐步扩展。 - 注重操作简便性
:选择支持图形化编程的系统,工人通过简单培训即可设置上下料路径,无需专业编程知识;同时要求供应商提供完善的售后支持,确保日常故障能快速解决,减少停机时间。 - 分阶段扩展应用
:初期可仅实现 “机器人取放 + 人工辅助” 的半自动化模式,待流程稳定后,再连接仓储、检测等环节,逐步实现全流程自动化。例如,某企业先在加工环节试点机器人上下料,3 个月后将机器人与自动仓储系统对接,实现原材料自动调取与成品自动入库,进一步提升效率。
结语
机器人上下料结合 3D 视觉技术,正在成为工业生产中优化物料流转的实用方案。它不依赖企业的规模与资金实力,而是通过解决效率、精度、成本、安全等共性问题,为各类制造企业提供切实可见的价值。从五金加工到食品包装,从电子元件到注塑制品,这项技术正以 “接地气” 的方式,帮助企业提升生产线的流畅度与稳定性,释放产能潜力。
对于追求可持续发展的企业而言,机器人上下料不仅是一种工具升级,更是生产模式向智能化、高效化转型的起点。它用实际效益证明,工业自动化并非遥不可及,而是每个注重细节、追求改进的企业都能触及的生产力提升路径,为工业生产的高质量发展注入持续动力。