
随着工业自动化向柔性制造升级,3D视觉无序抓取技术已成为智能产线的核心环节。该技术通过3D相机获取场景的点云数据,引导机器人实现对随机摆放工件的精准抓取。然而,当面对紧密堆叠和物体粘连这两种典型复杂场景时,系统的感知与决策能力面临严峻考验。本文将从3D视觉的视角,对这两个问题进行深入的解析。
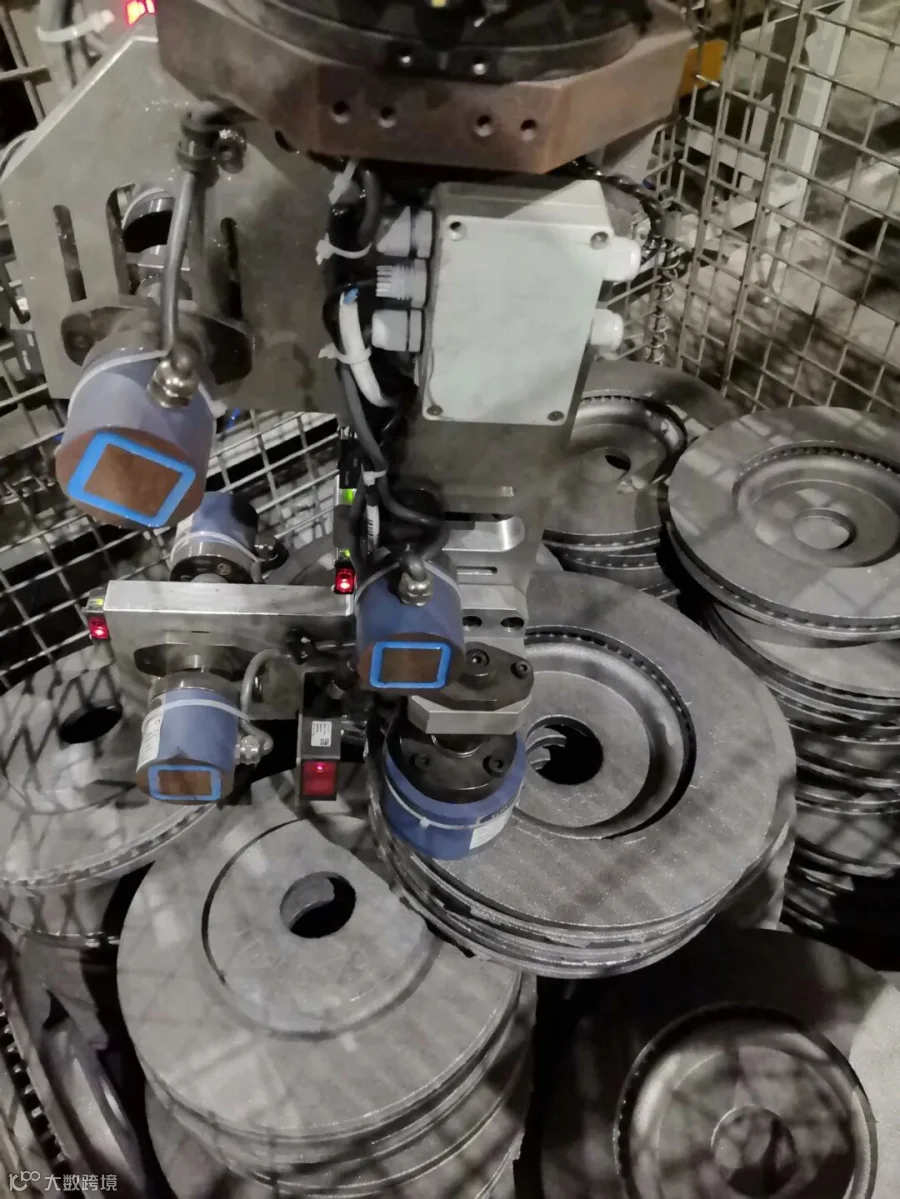
一、紧密堆叠:识别与可达性的双重博弈
紧密堆叠是指物体以极高的空间密度堆放,彼此之间几乎没有间隙。这对3D视觉系统提出了三大核心挑战:
1. 点云缺失与模型匹配失效
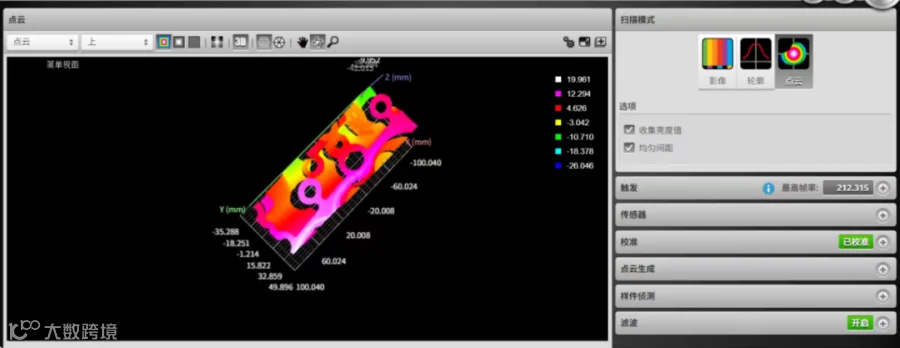
3D视觉的核心是获取物体的三维点云。在紧密堆叠场景中,物体间的接触和遮挡会导致严重的点云缺失。被压在底部的物体可能只有极小部分表面能被相机捕捉到,形成不完整的点云碎片。传统的基于全局模板匹配的算法在此情况下几乎无法工作,因为算法无法找到与完整3D模型足够匹配的数据。
解决方案与前沿技术:
局部特征匹配:算法不再试图匹配整个物体,而是转向提取点云的局部关键特征(如边缘、角点、曲面法线)进行匹配。即使物体只露出一角,只要其特征足够独特,系统仍可进行识别和定位。
深度学习分割:采用基于深度学习的实例分割网络,直接对点云或生成的深度图进行处理。网络经过海量堆叠场景数据的训练,能够“脑补”出被遮挡部分的形状,从而精准地将每个物体的点云实例分割出来。这是当前解决该问题的最主流且有效的方法。
2. 姿态估计(Pose Estimation)精度下降
即使成功识别了物体,不完整的点云也会导致其6D姿态(3D位置+3D旋转)估计不准。机器人需要知道物体精确的抓取点(如轴心、平面),姿态估计的微小误差可能导致抓取失败甚至碰撞。
3. 抓取路径规划与碰撞风险
在紧密堆叠中,机器人的末端执行器(吸盘或夹爪)的可达空间非常有限。3D视觉系统不仅要输出物体的姿态,还需进行抓取点检测(Grasp Pose Detection),并模拟抓取路径,确保在接近和抓取过程中不会与周围物体发生碰撞。这需要将3D点云场景转换为碰撞体,与机器人运动规划系统紧密耦合。
二、物体粘连:分割边界模糊的感知难题
粘连问题通常出现在粉末冶金、注塑件或具有粘性表面的工件中,物体之间因物理或化学作用力而“粘”在一起,在3D点云中表现为一个连续的、无明确分割边界的整体。
1. 点云连续性与分割困境
这是粘连问题的核心。两个粘连的物体在3D点云中没有明显的间隙,其点云是连通的。传统的聚类算法(如欧氏聚类)会将其误判为同一个物体,导致机器人尝试一次性抓取两个或多个工件,造成抓取失败。
解决方案与前沿技术:
凹点分析(Concavity Analysis):算法会分析点云或深度图轮廓的曲率。尽管物体表面粘连,但在其连接处通常会形成一个凹陷的、曲率较高的边界。通过检测这些凹点,可以作为分割的线索。
基于深度学习的语义/实例分割:与解决堆叠问题类似,强大的深度学习模型是更优的解决方案。通过标注大量粘连样本,模型可以学会识别那种“看似一体,实为两者”的微观特征,从而在连通点云中预测出精确的分割边界。
高分辨率点云与多模态融合:提升原始感知数据的质量是关键。采用高分辨率的3D结构光或激光轮廓仪,可以获取更密集、更精确的点云,使得粘连处的微小缝隙得以显现。此外,融合2D纹理信息(RGB图像)也能提供帮助,因为粘连处在颜色或纹理上可能存在细微差异。
2. 抓取策略的适应性
对于已识别出的粘连物体,抓取策略也需调整。例如,系统可能会优先选择抓取单个物体后执行一个轻微的“抖动”或“剥离”动作,以破坏粘连力,而不是直接进行搬运。
总结与展望
紧密堆叠与粘连是3D视觉无序抓取走向普适化、无人化必须攻克的技术高地。其解决思路高度一致地指向了高质量3D感知数据与先进人工智能算法的深度融合。
未来,我们可以看到以下趋势:
更强大的3D视觉传感器:能够提供更高精度、更高速度以及抗反光、抗暗色的点云数据。
端到端的深度学习模型:模型直接输入原始点云,输出可直接执行的抓取位姿,甚至预测抓取成功率,进一步简化系统流程。
仿真与数字孪生:利用高保真物理仿真环境生成海量、带标注的堆叠与粘连数据,以极低的成本训练和优化算法模型。
总而言之,对紧密堆叠与粘连问题的深入解析与突破,不仅将提升3D视觉无序抓取系统的鲁棒性,更是推动整个工业自动化智能化水平迈向新台阶的关键驱动力。