
在现代自动化产线中,机器人上下料是实现高效、连续生产的关键环节,其核心任务是精准、可靠地完成物料在工站、机床、传送带等位置间的转移。然而,实际应用中的首要挑战往往并非机器人本体的运动控制,而是来料状态的不确定性与目标定位的复杂性。这两大问题直接决定了上下料系统的可靠性、柔性与整体效率。
来料状态的多样性与不确定性
机器人上下料的理想前提是物料以预设的姿态、位置和间距整齐送达。但现实生产环境复杂多变,来料状态常呈现多种挑战形态:
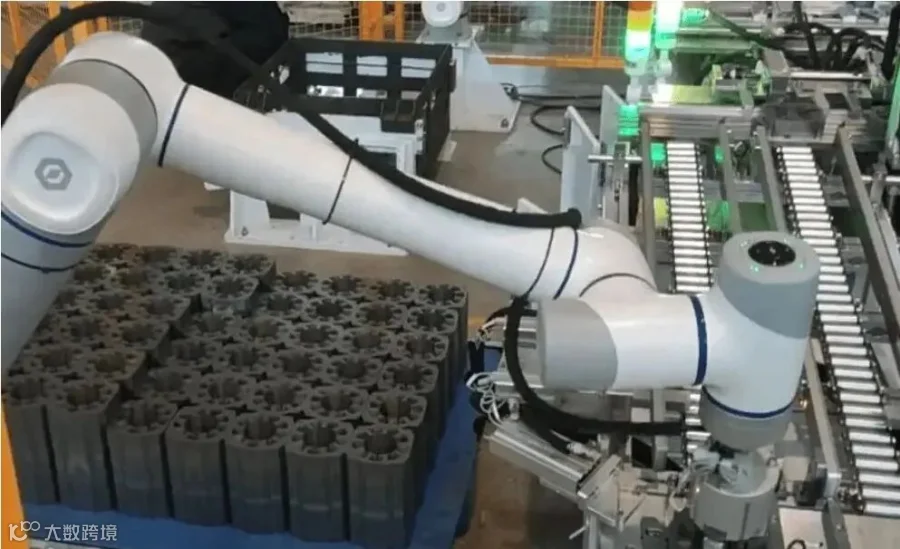
姿态与位置随机:物料可能散乱堆叠在料箱中(即“料框拾取”场景),或无序放置在传送带、托盘上。其三维空间姿态(偏转、倾斜)和水平位置均不确定,机器人无法依赖固定坐标进行抓取。
状态不一致性:物料本身可能存在个体差异,如铸造件的毛刺、钣金件的轻微变形,或在输送过程中产生表面油污、划痕。这些变化会影响视觉或传感器的识别与定位。
动态与节拍压力:在连续生产线中,物料往往处于运动状态(如传送带流水线),机器人需在动态背景下完成识别、跟踪与抓取,对系统的实时性与节拍匹配提出极高要求。
这些不确定性要求机器人上下料系统必须具备强大的感知与决策能力,以应对非结构化环境。
精确定位:视觉与传感技术的核心作用
为克服来料不确定性,实现精准上下料,先进定位技术成为系统的“眼睛”和“大脑”。其主要方式包括:
视觉定位系统:这是应用最广泛的解决方案。通过2D或3D视觉传感器获取物料图像或点云数据,利用模板匹配、特征识别或深度学习算法,实时计算出物料的确切位置与三维姿态。对于料框拾取,常采用3D视觉引导技术,通过深度信息准确分辨堆叠物料的轮廓与抓取点,规划无碰撞的抓取路径。
多传感器融合:在复杂场景下,可能结合视觉、激光测距、力传感等多种信息。例如,视觉进行粗定位后,利用力传感器在抓取时进行接触感知和微小位置补偿,确保插入或放置的精准性(尤其在精密装配上下料中)。
基准与坐标系标定:精准的定位离不开稳定的坐标系转换。系统需通过精确的手眼标定(确定相机与机器人末端关系)和工件坐标系标定,将视觉识别到的物料位置准确转换至机器人基坐标系,引导末端执行器到达目标点。

系统集成与柔性化策略
解决来料与定位问题,需要从系统层面进行优化设计:
末端执行器的适配性:针对不同物料(尺寸、形状、材质),需设计或选择具备足够包容性的末端执行器,如自适应气动抓手、柔性电爪或真空吸盘阵列,以应对一定的位置和姿态误差。
工艺路径的智能规划:机器人不仅需抵达目标点,其运动路径还需考虑避障、效率优化以及与周边设备的协同。对于动态来料,需集成预测算法,提前规划抓取点与运动轨迹。
异常处理与恢复机制:一套鲁棒的上下料系统必须具备异常检测与处理能力。当视觉识别失败、抓取脱落或放置位置偏差时,系统应能触发重试、报警或调用备用策略,保证生产流程的连续性。
总结与展望
来料与定位问题是机器人上下料从“可自动化”走向“高柔性、高可靠”必须攻克的核心瓶颈。未来的发展趋势将集中于:
AI深度集成:利用深度学习提升对复杂、多变物料的识别与分类能力,甚至实现无序混合抓取。
实时性与适应性增强:通过更高速的视觉处理硬件与算法,满足高速生产线的节拍要求,并自适应物料状态的缓慢漂移。
标准化与易用性:开发更通用的视觉引导软件套件和标定工具,降低系统部署与调试的技术门槛。
最终,通过先进的感知、智能的决策与柔性的执行三者深度融合,机器人上下料系统将能从容应对日益复杂的生产环境,成为智能制造中不可或缺的核心单元。