
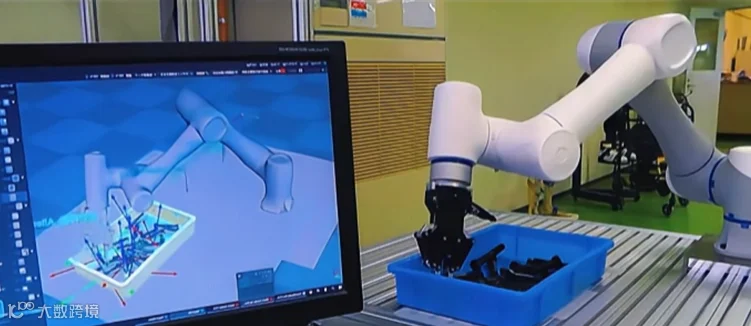
在自动化产线上,无序抓取被视为“机器换人”的最后一公里。然而,当物体紧密堆叠、相互粘连甚至部分遮挡时,传统的抓取方式往往束手无策——点云断裂、姿态误判、抓取冲突接踵而至。
3D视觉无序抓取技术,正是为了破解这一困局而生。它不仅要“看见”物体,还要在混乱中理解每一个物体的真实边界与可抓取姿态。
紧密堆叠与粘连,到底难在哪里?
先看一个典型场景:一筐零部件倒入上料料箱,它们相互嵌套、倾斜倚靠、边缘重叠。对3D视觉系统而言,挑战体现在三个层面:
1. 点云融合与边界消失
两个相邻物体的表面点云在空间上连成一片,算法难以判断哪里是物体A的终点、哪里是物体B的起点。粘连区域看起来就像一个大块物体,而不是多个独立个体。
2. 遮挡导致信息缺失
上层物体遮挡了下层物体的大部分表面,导致底层物体的点云稀疏甚至缺失。系统无法获取完整形状,也就无法准确计算抓取位姿。
3. 抓取碰撞风险
即使识别出了单个物体,其周围被其他物体紧紧包围。机械手接近时,很可能撞到相邻物体,造成抓取失败或损坏工件。
传统方法的局限:为什么普通分割不够用?
常规的点云分割算法(如欧式聚类、区域生长)在物体有明显间隙时效果不错,但一旦堆叠粘连,就会失效:
欧式聚类:依赖距离阈值。粘连物体之间距离过近,会被误判为同一个聚类。
区域生长:依赖法向平滑性。堆叠状态下物体之间的接触面法向突变不明显,算法容易“跨过”边界。
这意味着,通用分割方法无法直接应用于紧密堆叠场景,需要专门的设计。
破解之道:从分割到抓取的完整链路
当前主流的解决方案,不再试图“完美分割”每一个物体,而是直接寻找可抓取的候选区域。以下是几种关键技术路径:
1. 基于深度学习的实例分割
直接在3D点云或2.5D深度图上学习物体的个体边界。通过训练大量堆叠场景的标注数据,模型能够学会识别“即使点云粘连,这里仍然是两个物体”。输出结果是每个物体对应的点云掩膜,即使它们紧贴在一起也能区分。
2. 表面法向与曲率分析
物体在接触边缘处,法向方向会发生剧烈变化。通过计算局部点云的法向差异和曲率突变,可以定位物体之间的“缝合线”。这种方法不依赖颜色或纹理,对同色、同材质物体尤其有效。
3. 候选抓取点直接生成
跳过分割步骤,直接在原始点云中生成大量抓取假设(抓取点位姿),然后通过碰撞检测和可行性评分筛选出最优抓取。常见方法包括:基于抓取对抗网络或点对特征匹配。这种方法天然适合堆叠场景,因为它不要求完整分割。
4. 分层抓取策略
系统优先抓取最上层的、遮挡程度最低的物体。抓走一层后,下层物体暴露出来,再进行新一轮识别。配合力控或柔性夹爪,允许轻微接触相邻物体而不造成损伤。
5. 多视角融合与主动感知
通过机械臂带动相机移动到不同角度拍摄,或者使用多台固定相机从不同方向采集点云。将多帧点云融合,可以补全单视角下的遮挡盲区。更进一步,系统可以主动选择下一个最佳视角,逐步揭开堆叠结构。
哪些场景最需要这项能力?
|
|
|
|
|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
落地实施的三个核心建议
接受“不完全分割”
在紧密堆叠场景中,追求100%完美分割既不现实也不必要。优先保证能够稳定抓出至少一个物体,而不是一次性识别全部。算法与硬件协同设计
深度相机的工作距离、精度、抗环境光能力直接影响点云质量。建议在选型阶段就用真实堆叠样品进行实测,避免“算法很强但数据太差”的尴尬。预留重试与恢复机制
抓取失败是常态。系统应设计自动重试逻辑(换个角度再抓一次)和异常恢复流程(如震动料箱改变堆叠状态)。
结语
紧密堆叠与粘连,是无序抓取领域公认的“硬骨头”。传统方法试图通过更精细的分割来解决问题,而现代3D视觉系统的思路已经转变为:在混乱中寻找可行抓取,而不是在混乱中追求完美重建。
随着深度学习在3D点云处理上的持续突破,以及工业级深度相机性能的提升,曾经被视为“不可能”的堆叠抓取场景,正在一个个变成可落地的现实。如果你的产线正被散乱上料困扰,不妨从评估当前堆叠的“混乱程度”开始——答案往往比想象中更近。