
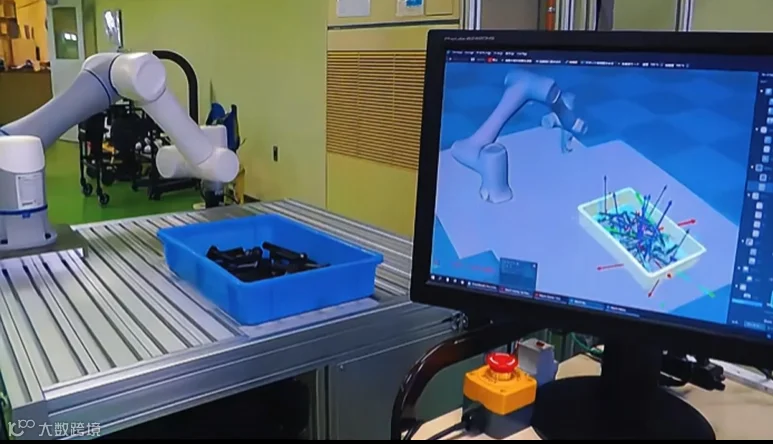
在工业自动化与智能制造的浪潮中,3D视觉无序抓取技术成为突破传统机器人抓取局限的关键。面对杂乱堆放的物体,如何精准定位目标并规划有效抓取策略,是3D视觉无序抓取的核心挑战。本文聚焦位姿估计与抓取规划两大核心阶段,解析其技术原理、方法演进及未来方向。
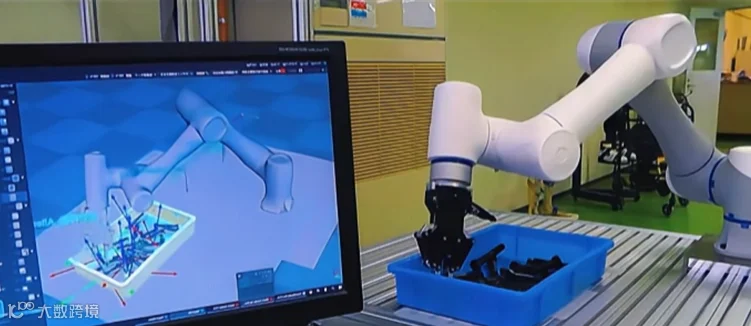
一、位姿估计:从无序到有序的“视觉定位”无序抓取场景中,物体随机堆叠、姿态各异,位姿估计需解决物体在三维空间中的位置与姿态(六自由度)问题。传统方法依赖结构光或激光雷达,但受限于成本与计算量。当前主流技术转向基于深度学习的单目/双目视觉方案:
1. 深度估计技术:通过监督学习或无监督学习,从RGB图像中重建深度信息。监督学习依赖标注数据,精度高但数据获取成本高;无监督学习通过几何约束自训练,适应性强,但精度待提升。引入法向量或边缘信息可优化深度图质量。
2. 六自由度抓取检测:基于深度学习的模型(如GQ-CNN)通过卷积神经网络预测抓取点的位置、姿态及成功率,结合场景语义分割技术,实现复杂环境下对物体位姿的精细化估计。
二、抓取规划:智能决策与路径优化位姿信息确定后,抓取规划需结合环境约束与机械臂能力,生成可行抓取策略:
1. 吸取检测:针对不规则物体,利用大规模数据集(如SuctionNet-1Billion)训练的模型,预测真空吸盘的最佳吸附点与吸力方向,兼顾稳定性与效率。
2. 平行夹持器规划:针对可夹持物体,通过关键点检测与模板匹配,确定夹爪的闭合位置与角度。结合力反馈控制,避免碰撞或滑落。
3. 路径规划:基于环境三维点云,采用碰撞检测算法(如RRT*)生成无障碍抓取路径,并优化机械臂关节运动轨迹,降低能耗与时间成本。
三、技术挑战与未来趋势尽管技术持续进步,但3D视觉无序抓取仍面临挑战:复杂环境下的感知鲁棒性不足、小物体或透明物体检测精度低、实时性要求与计算资源的矛盾。未来发展方向包括:
● 自监督学习与多模态融合:减少数据依赖,融合触觉、听觉等多传感器信息提升感知能力。
● 实时性优化:轻量化神经网络模型与边缘计算结合,实现毫秒级决策。
● 强化学习驱动的智能规划:通过与环境交互学习,动态优化抓取策略。
结语
位姿估计与抓取规划是3D视觉无序抓取的技术基石。随着深度学习、多传感器融合与实时计算能力的突破,无序抓取正逐步从实验室走向生产线,推动智能制造向更柔性、智能的方向发展。未来,其应用场景将拓展至物流仓储、医疗辅助等更多领域,为自动化革命注入新动能。