

机器人已经成为了我们生活的一部分,但是除了经常能看到机器人的外表以外,我们很少会接触到机器人的“内在”,如果你是一个标准的机器人爱好者,你还应该知道这个——机器人的技术参数。

机器人的技术参数反映了机器人可胜任的工作、具有的最高操作性能等情况,是设计、应用机器人必须考虑的问题。每个工业机器人制造商在产品供货时所提供的技术数据。所以不同的机器人,它的技术参数不一样。

工业机器人的主要技术参数一般都有:自由度、关节、工作空间、工作速度、工作载荷、定位精度和重复定位精度和承载能力等。
自由度是指机器人所具有的独立坐标轴运动的数目。工业机器人的自由度是指确定机器人手部在空间的位置和姿态时所需要的独立运动参数的数目。手指的开、合,以及手指关节的自由度一般不包括在内。.机器人的自由度数一般等于关节数目。 机器人常用的自由度数一般不超过5~6个。
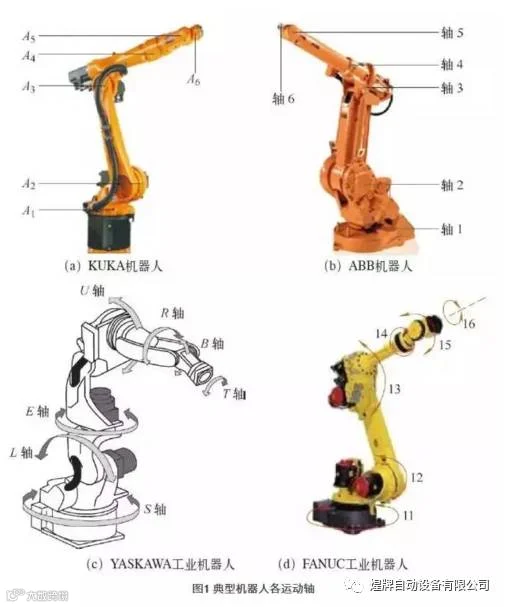
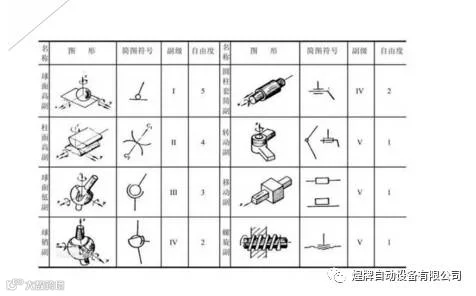
即运动副,允许机器人手臂各零件之间发生相对运动的机构。
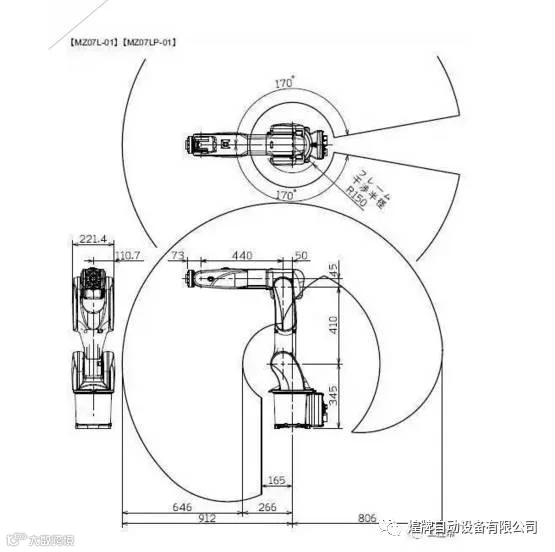
机器人手臂末端或手腕中心所能到达的所有点的集合。其形状取决于机器人的自由度数和各运动关节的类型与配置。机器人的工作空间通常用图解法和解析法两种方法进行表示。
工作空间的形状好和大小是十分重要的,机器人在进行某一个作业的时候,可能会因为存在手部不能到达的作业死区而不能完成任务。
工业机器人在工作载荷条件下、匀速运动过程中,机械接口中心或工具中心点在单位时间内所移动的距离或转动的角度。包括工业机器人手臂末端的最大速度,工作速度直接影响到工作效率,提高工作速度可以提高工作效率,所以机器人的加速减速能力显得尤为重要,需要保证机器人加速减速的平稳性。

指机器人在工作范围内任何位置上所能承受的最大负载,一般用质量、力矩、惯性矩表示。还和运行速度和加速度大小方向有关,一般规定高速运行时所能抓取的工件重量作为承载能力指标。

能够实现的最小移动距离或最小转动角度。

精度包含了定位精度和重复定位精度
定位精度:机器人手部实际到达位置和目标位置之间的差异。
重复定位精度:机器人重新定位其手部于同一目标位置的能力,可以用标准偏差这个统计量来表示.
煌牌机器人
广州煌牌自动设备公司与国内外多所名牌高校如美国麻省理工学院、香港科技大学、重庆大学、广东工业大学等合作研发项目,实现产学研一体大力推进生产力,解放劳动力。专业提供日本安川、那智不二越、雅马哈、OTC等世界知名品牌的机器人自动化生产系统服务并提供完善的售后服务。广州煌牌自动设备公司承诺"以人为本,质量第一,服务至上"的经营宗旨,做中国最优秀专业的机器人系统解决方案服务供应商!
广州煌牌自动设备公司时刻努力提高自身研发及生产能力。自2012年公司觉察到未来工业机器人有着广阔的发展空间,开始独立研发机器人本体。目前已经成功突破理论壁垒,并完成样机生产,预计2017年正式投入市场!
