
摘要:本文主要是借助网络通讯的方法(LINK),实现伺服的的定位,回零,点动等功能。
关键词:LINK PLC 伺服
使用伺服实现高精度定位的时候,我们一般都采用的是脉冲控制,即通过PLC发送脉冲实现定位。但是从PLC到伺服驱动器间的脉冲信号很容易受到外界杂波干扰,并且控制伺服的轴数也受到PLC高速脉冲输出的限制,接线也不方便。因此,我们可以通过通讯的方式来控制伺服。台达的A2伺服完全能够实现此类控制功能。
一、实验模拟材料
ASDA-A2-0421-M 1套
DVP16EH00T3 1台
伺服驱动器485通讯线一根
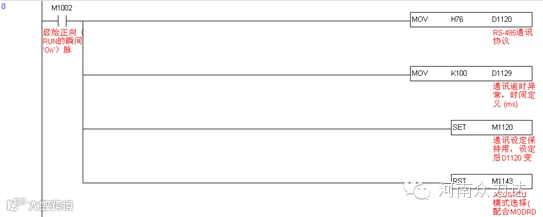
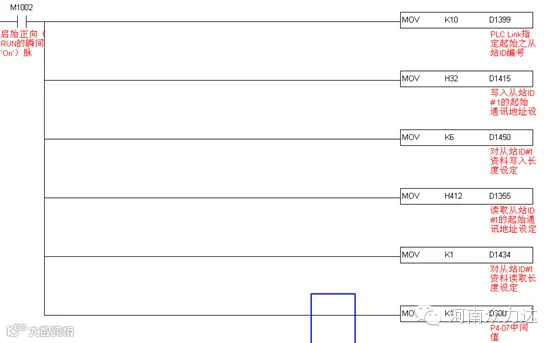
二、 网络通讯部分-LINK
台达产品提供了PLC与各类产品间方便快捷的通讯方式-EASY LINK,EASY LINK通讯是台达PLC最有特色的通讯指令,提供最多与32个从站通讯,每个从站各读写100笔数据的能力,编程相对来说比较简单。
三.伺服相关参数
1.通讯部分参数
P3-00: A 伺服的站号设定
P3-01: 1 传输速率 9600
P3-02:1 通讯协议 ASCII 7 E 1
P3-05:1 通讯口功能选择RS485
2.DI/DO功能定义
P2-10:101 SON
P2-11: 124 回归的零点接近开关
P2-12:137 点动正转
P2-13:138 点动反转
P2-14:111 POS0
P2-15:108 CTRG
P2-16:123 正转极限
P2-17:121 急停
P2-18:105 目标位置到达
P2-19:109 原点回归完成
P2-20:111 伺服报警
3.原点回归及定位的参数
P1-01:01 伺服控制模式PR
P5-04: 23 原点回归的模式(回零的方式)
P6-00:2 原点回归的定义(Path#0),回零完成跳转到路径2
P5-60:800 PATH#0内部目标速度设定
P6-02:2 PATH#1定义,定位控制完成停止
P6-03:1000 PATH#1的数据
P5-61:1000 PATH#1内部定位速度设定(相当于定位速度)
P6-04:2 PATH#2定义,定位控制完成停止
P6-05:0 PATH#2的数据
4.软件SDI控制参数
P2-30: 5 辅助功能,各参数的设定值于断电后不保持
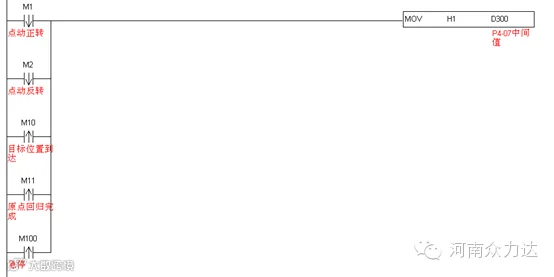
P3-06: HFF DI的控制由P4-07参数控制
P0-35:04090407 映射P4-09/P4-07参数
P0-36:06030603 映射P6-03参数
P0-37:021E0306 映射P2-30/P3-06参数
说明:P0-35 映射参数P0-25的映射目标设定
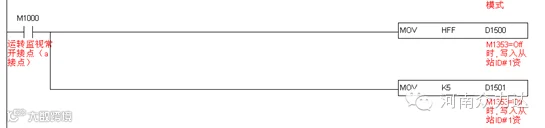
5.程序中用到的参数
P0-25 映射P0-35设定的参数
P0-26 映射P0-36设定的参数
P0-27 映射P0-37设定的参数
说明:P0-25映射参数#1,向P0-25的低16位是向P4-07写参数,高16位是向P4-09写参数
四.相关说明及注意事项
1、PR模式中的位置命令,位置值可以设定为绝对/增量可单独设定,数值单位为使用者单位脉冲个数
2、 PR模式中触发第一组位置命令寄存器即可以实现回零动作,台达还有DI端口SHOM启动原点回归可以在PT和PR模式下实现回零动作。
3、 参数P2-30和参数P3-06断电后这两个参数不记忆设定值,所以程序中上电后要向参数中写入值。
4、 触发定位控制的时候,应该先选择POS开关,再延时触发(实际在操作中可以将POS开关和CTRG开关一起触发)。
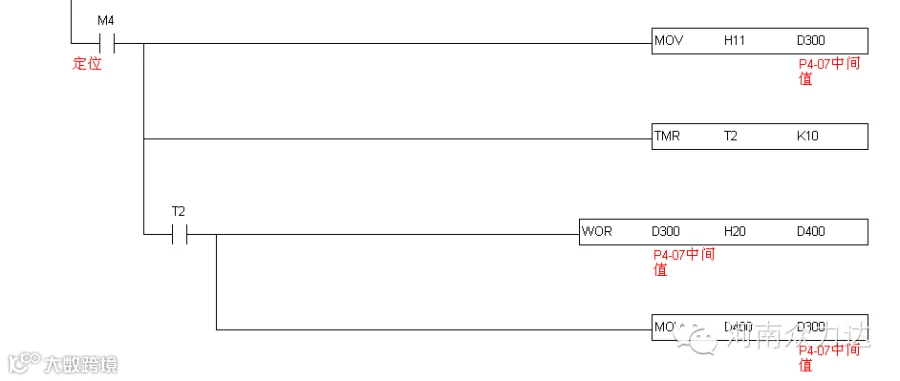
5、 每次回零或者定位完成后,必须将开关状态P4-07编程1(SON状态)
6、使用过程中,发现用485通讯的时候,执行有延迟,并且调节通讯速率效果不是太明显。像这种多台伺服控制的时候最好是使用CAN通讯进行控制。
******************************************************
关注我们:提供丰富的产品信息,优秀的技术服务与支持。
欢迎搜索“河南众力达”微信号:hnzlddq
******************************************************
更多精彩内容请登陆河南众力达官方网站:www.hnzld.com
电话:0371-55696256
网址:http://www.hnzld.com
地址:铭功路与西太康路交汇处(新太康机电城)A栋1606室
安阳办事处 电话:0372-2560148
地址:安阳市文昌大道西段(三里屯)
代理品牌:科姆龙 和泉 伟肯 日立 奥托尼克斯 台达 三菱