
摘要:
原点回归在伺服系统中经常会被用到,尤其是对于机床、包装设备、加工中心等加工精度要求高的场合,而台达所生产研发的 20PM是一款处理速度与控制精度极高的运动控制器, 在处理一些复杂的运动指令也是游刃有余。
20PM 主要特点:
除了具备台达 EH3 系列主机所具有的功能外, 它还具有如下显著特点。
1、兼容G-code/M-code,3轴直线、圆弧、螺旋插补运动控制,它既是运动控制主机,也是扩展模块。
※ 除了可作为运动控制主机独立动作外, 也可以成为另外一台PM 或 EH3 系列主机的运动功能模块。
※ 主机仅需下达启动和停止命令作为扩展模块的 PM 即可独立动作不受扫描周期影响。
2、支持电子凸轮功能(2048 点精度)及飞剪、追剪应用
※ 16 点 I/O 主机,最大支持扩展 512点
※ 程序容量:64K Steps /数据寄存器:10K Words
※ 内置 RS232与 RS485通讯端口
※ 兼容标准 MODBUS ASCII/RTU 通讯协议
3、运动功能
※ 内置AB相差动信号输出 2/3 组最高 500K PPS 差动输出。
※ 支持手摇轮直接输入
※ 单轴运动控制功能(1 段速、2 段速、手摇轮输入)
※ 电子齿轮功能
关键词:原点回归 正常模式 覆写模式 近点信号
20PM 原点回归模式设定
20PM 原点回归可以通过 D1816 中的 Bit8-10 来进行设定:
D1816 之 B8 :原点回归方向
B8=0:执行原点回归方向往当前位置 CP 内容递减方向执行。
B8=1: 执行原点回归方向往当前位置 CP 内容递增方向执行。
D1816之 B9 :原点回归模式
B9=0:正常模式,即为检测近点(DOG)信号产生后,经过 N 个原点回归零点信号后再经过P个原点回归信号后, 电机立即停止。
B9=1:覆写模式,即为检测近点(DOG)信号产生后,经过 N 个原点回归零点信号或经过 P 个原点回归信号,其中一项先到达,
电机立即停止。
D1816之 B10 :原点回归 DOG 触发沿检测
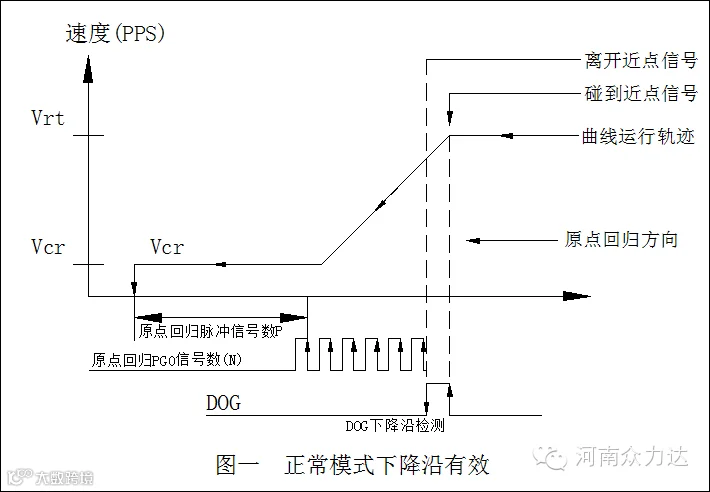
B[9、10]:00 正常模式,原点回归 DOG 下降沿检测 ON(下降沿检测有效)
原点回归动作,电机以原点回归 VRT 运转,当碰到近点(DOG)信号时,电机减速到以原点回归减速速度 VCR 运转,当再检测到DOG 下降沿后,经过 N 个原点回归零点信号脉冲,再经过 P 个经点回归脉冲后电机停止。
若设定的原点回归 PG0 信号数 N 或原点脉冲信号 P 太小时,碰到近点 DOG 时电机开始做原点回归减速运动,若再检测到 DOG
下降沿时,电机若达到指令的 N 个 PG0 再经过 P 个脉冲信号后立即停止,不管原点回归速度是否已经到达 VCR。
假如原点回归信号 N 设定为 0,脉冲数 P 设定为 0,则碰到 DOG的下降沿时电机立即停止(DOG 下降沿)
动作顺序如图一。
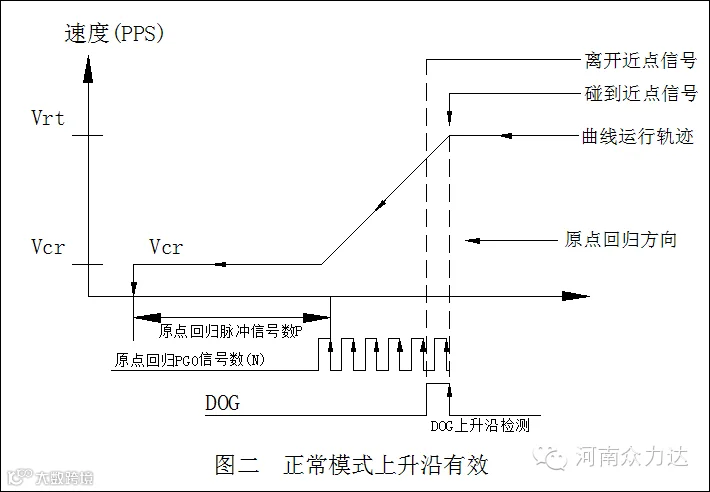
B[9、10]:01 正常模式,原点回归 DOG 下降沿检测 OFF(上升沿检测有效)
原点回归动作,电机以原点回归 VRT 运转,当碰到近点(DOG)信号时, 电机减速到以原点回归减速速度 VCR 运转, 经过 N 个原点回归零点信号脉冲,再经过 P 个经点回归脉冲后电机停止。
若设定的原点回归 PG0 信号数 N 或原点脉冲信号 P 太小时,碰到近点 DOG 时电机开始做原点回归减速运动,若再检测到 DOG
下降沿时,电机若达到指令的 N 个 PG0 再经过 P 个脉冲信号后立即停止,不管原点回归速度是否已经到达 VCR。
假如原点回归信号 N 设定为 0,脉冲数 P 设定为 0,则碰到 DOG的上升沿时电机立即停止(DOG 上升沿)
动作顺序如图二
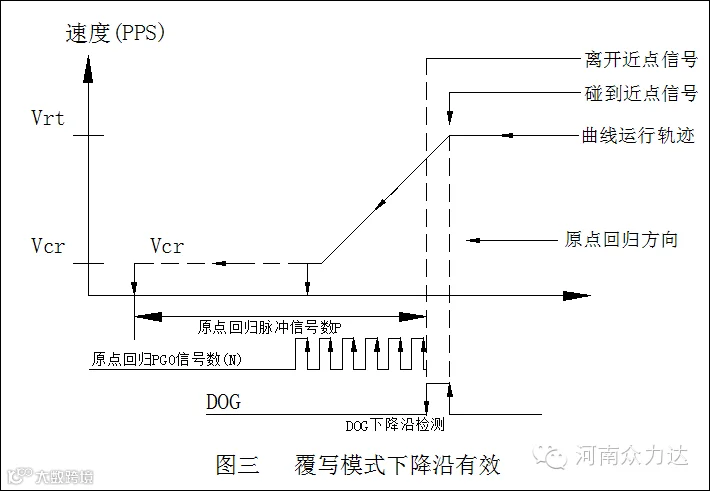
B[9、10]:10 覆写模式,原点回归 DOG 下降沿检测 ON(下降沿检测有效)
原点回归动作,电机以原点回归 VRT 运转,当碰到近点(DOG)信号时,电机减速到以原点回归减速速度 VCR 运转,当再检测到
DOG 下降沿后,经过 N 个原点回归零点信号脉冲,或经过 P 个经点回归脉冲后电机停止。
若设定的原点回归 PG0 信号数 N 或原点脉冲信号 P 太小时,碰到近点 DOG 时电机开始做原点回归减速运动,若再检测到 DOG
下降沿时,电机若达到指令的 N 个 PG0 或经过 P 个脉冲信号后立即停止,不管原点回归速度是否已经到达 VCR。
假如原点回归信号 N 设定为 0,脉冲数 P 设定为 0,则碰到 DOG的下降沿时电机立即停止(DOG 下降沿)
动作顺序如图三
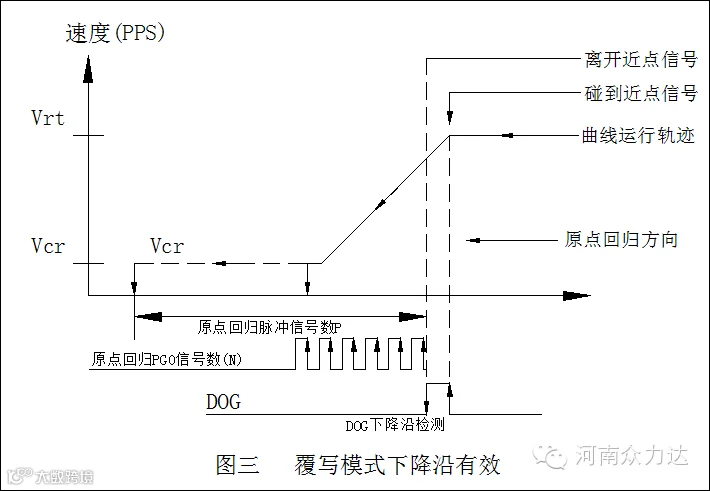
B[9、10]:11 覆写模式,原点回归 DOG 下降沿检测 OFF(上升沿检测有效)
原点回归动作,电机以原点回归 VRT 运转,当碰到近点(DOG)信号时, 电机减速到以原点回归减速速度 VCR 运转, 经过 N 个原点回归零点信号脉冲,或经过 P 个经点回归脉冲后电机停止。
若设定的原点回归 PG0 信号数 N 或原点脉冲信号 P 太小时,碰到近点 DOG 时电机开始做原点回归减速运动,电机若达到指令
的 N 个 PG0 或经过 P 个脉冲信号后立即停止,不管原点回归速度是否已经到达 VCR。
假如原点回归信号 N 设定为 0,脉冲数 P 设定为 0,则碰到 DOG的上升沿时电机立即停止(DOG 上升沿)
动作顺序如图四
总结:
伺服原点回归的方式有很多种, 以上介绍的是 20PM 运动控制器自带的几种回零方式。当然还可以根据自己的需求,来自己设定原点回归方式,也可以结合伺服的原点回归来做一些更为复杂的控制。
如有需要或是其它技术问题可以来电咨询:0371-55696256
*****************************************************
关注我们:提供丰富的产品信息,优秀的技术服务与支持。
欢迎搜索“河南众力达”微信号:hnzlddq
*****************************************************
更多精彩内容请登陆河南众力达官方网站:www.hnzld.com
电话:0371-55696256
网址:http://www.hnzld.com
地址:铭功路与西太康路交汇处(新太康机电城)A栋1606室
安阳办事处 电话:0372-2560148
地址:安阳市文昌大道西段(三里屯)
代理品牌:科姆龙 丹佛斯 台达 三菱 日立 奥托尼克斯 和泉
专业维修变频器、PLC、伺服电机、驱动器、人机界面