

打开以下文件
-
SoMachine:V4.3 -
LMC058FW:4.0.3.6 -
LMC058SW:4.0.3.7 -
LXM28FW:1.6.2.0 -
LXM28SW:1.75.17
1

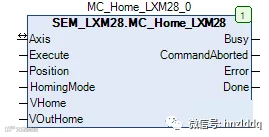
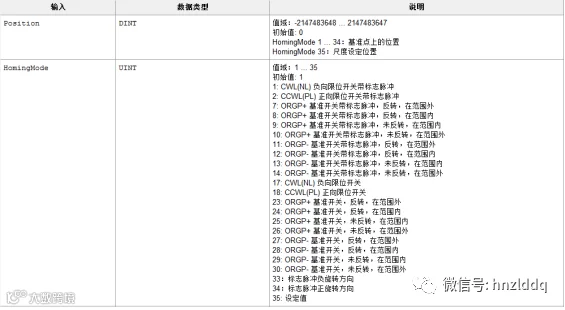
1:原点回归启动后,电机朝反向限位方向运转(第一段速),遇到反向限位后,电机向相反方向运行,检测到反向限位下降沿后运行至电机 Z 相停止(第二段速),当前位置被设置为 MC_Home_LXM28 功能块的 Position 数值(脉冲数);运行时遇到正向限位后,电机停止,伺服驱动器显示 AL015 报警


1

2:原点回归启动后,电机朝正向限位方向运转(第一段速),遇到正向限位后,电机向相反方向运行,检测到正向限位下降沿后运行至电机 Z 相停止(第二段速),当前位置被设置为 MC_Home_LXM28 功能块的 Position 数值(脉冲数);运行时遇到反向限位后,电机停止,伺服驱动器显示 AL014 报警


1

7:原点回归启动后,电机朝正向限位方向运转(第一段速),遇到原点信号上升沿后,电机向相反方向运行,检测到原点信号下降沿后运行至电机 Z 相停止(第二段速),当前位置被设置为 MC_Home_LXM28 功能块的 Position 数值(脉冲数);运行时遇到正向限位后,电机向相反方向运行(第一段速),检测到原点信号下降沿后运行至电机 Z 相停止(第二段速),当前位置被设置为 MC_Home_LXM28 功能块的Position 数值(脉冲数);运行时遇到反向限位后,电机停止,伺服驱动器显示 AL014 报警


1

8:原点回归启动后,电机朝正向限位方向运转(第一段速),遇到原点信号上升沿后,电机向相同方向运行至电机 Z 相停止(第二段速),当前位置被设置为 MC_Home_LXM28 功能块的 Position 数值(脉冲数);运行时遇到正向限位后,电机向相反方向运行,检测到原点信号下降沿后,电机向相反方向运行(第一段速),检测到原点信号上升沿后,电机向相同方向运行至电机 Z 相停止(第二段速),当前位置被设置为 MC_Home_LXM28 功能块的 Position 数值(脉冲数);运行时遇到反向限位后,电机停止,伺服驱动器显示 AL014 报警


1

9:原点回归启动后,电机朝正向限位方向运转(第一段速),遇到原点信号上升沿后,电机向相同方向运行,检测到原点信号下降沿后,电机向相反方向运行(第一段速),再次检测到原点信号上升沿后,电机向相同方向运行至电机 Z 相停止(第二段速),当前位置被设置为 MC_Home_LXM28 功能块的Position 数值(脉冲数);运行时遇到正向限位后,电机向相反方向运行(第一段速),检测到原点信号上升沿后,运行至电机 Z 相停止(第二段速),当前位置被设置为 MC_Home_LXM28 功能块的 Position 数值(脉冲数);运行时遇到反向限位后,电机停止,伺服驱动器显示 AL014 报警


1

10:原点回归启动后,电机朝正向限位方向运转(第一段速),遇到原点信号上升沿后,电机向相同方向运行,检测到原点信号下降沿后,电机向相同方向运行至电机 Z 相停止(第二段速),当前位置被设置为 MC_Home_LXM28 功能块的 Position 数值(脉冲数);运行时遇到正向限位后,电机向相反方向运行(第一段速),检测到原点信号上升沿后,电机向相反方向运行,检测到原点信号下降沿后,电机向相同方向运行至电机 Z 相停止(第二段速),当前位置被设置为 MC_Home_LXM28 功能块的 Position 数值(脉冲数);运行时遇到反向限位后,电机停止,伺服驱动器显示 AL014 报警


1

11:原点回归启动后,电机朝反向限位方向运转(第一段速),遇到原点信号上升沿后,电机向相反方向运行,检测到原点信号下降沿后运行至电机 Z 相停止(第二段速),当前位置被设置为 MC_Home_LXM28 功能块的 Position 数值(脉冲数);运行时遇到反向限位后,电机向相反方向运行(第一段速),检测到原点信号上升沿后,电机向相同方向运行,检测到原点信号下降沿后运行至电机 Z 相停止(第二段速),当前位置被设置为 MC_Home_LXM28 功能块的 Position 数值(脉冲数);运行时遇到正向限位后,电机停止,伺服驱动器显示 AL015 报警


1

12:原点回归启动后,电机朝反向限位方向运转(第一段速),遇到原点信号上升沿后,电机向相同方向运行至电机 Z 相停止(第二段速),当前位置被设置为 MC_Home_LXM28 功能块的 Position 数值(脉冲数);运行时遇到反向限位后,电机向相反方向运行,检测到原点信号下降沿后,电机向相反方向运行(第二段速),检测到原点信号上升沿后,电机向相同方向运行至电机 Z 相停止(第二段速),当前位置被设置为 MC_Home_LXM28 功能块的 Position 数值(脉冲数);运行时遇到正向限位后,电机停止,伺服驱动器显示 AL015 报警


1

13:原点回归启动后,电机朝反向限位方向运转(第一段速),遇到原点信号上升沿后,电机向相同方向运行,检测到原点信号下降沿后,电机向相反方向运行(第一段速),再次检测到原点信号上升沿后,电机向相同方向运行至电机 Z 相停止(第二段速),当前位置被设置为 MC_Home_LXM28 功能块的Position 数值(脉冲数);运行时遇到反向限位后,电机向相反方向运行(第一段速),检测到原点信号上升沿后,电机向相同方向运行至电机 Z 相停止(第二段速),当前位置被设置为 MC_Home_LXM28 功能块的 Position 数值(脉冲数);运行时遇到正向限位后,电机停止,伺服驱动器显示 AL015 报警


1

14:原点回归启动后,电机朝反向限位方向运转(第一段速),遇到原点信号上升沿后,电机向相同方向运行,检测到原点信号下降沿后,电机向相同方向运行至电机 Z 相停止(第二段速),当前位置被设置为 MC_Home_LXM28 功能块的 Position 数值(脉冲数);运行时遇到反向限位后,电机向相反方向运行(第一段速),检测到原点信号上升沿后,电机向相反方向运行,检测到原点信号下降沿后,电机向相同方向运行至电机 Z 相停止(第二段速),当前位置被设置为 MC_Home_LXM28 功能块的 Position 数值(脉冲数);运行时遇到正向限位后,电机停止,伺服驱动器显示 AL015 报警


1

17:原点回归启动后,电机朝反向限位方向运转(第一段速),遇到反向限位后,电机向相反方向运行,检测到反向限位下降沿时停止(第二段速),当前位置被设置为 MC_Home_LXM28 功能块的 Position 数值(脉冲数);运行时遇到正向限位后,电机停止,伺服驱动器显示 AL015 报警


1

18:原点回归启动后,电机朝正向限位方向运转(第一段速),遇到正向限位后,电机向相反方向运行,检测到正向限位下降沿时停止(第二段速),当前位置被设置为 MC_Home_LXM28 功能块的 Position 数值(脉冲数);运行时遇到反向限位后,电机停止,伺服驱动器显示 AL014 报警


1

23:原点回归启动后,电机朝正向限位方向运转(第一段速),遇到原点信号上升沿后,电机向相反方向运行,检测到原点信号下降沿时停止(第二段速),当前位置被设置为 MC_Home_LXM28 功能块的 Position 数值(脉冲数);运行时遇到正向限位后,电机向相反方向运行(第一段速),检测到原点信号上升沿后,电机向相同方向运行,检测到原点信号下降沿时停止(第二段速),当前位置被设置为 MC_Home_LXM28 功能块的 Position 数值(脉冲数);运行时遇到反向限位后,电机停止,伺服驱动器显示 AL014 报警


1

24:原点回归启动后,电机朝正向限位方向运转(第一段速),遇到原点信号上升沿后停止,当前位置被设置为 MC_Home_LXM28 功能块的Position 数值(脉冲数);运行时遇到正向限位后,电机向相反方向运行(第一段速),检测到原点信号上升沿后,电机向相同方向运行,检测到原点信号下降沿时,电机向相反方向运行(第二段速),再次检测到原点信号上升沿时停止,当前位置被设置为 MC_Home_LXM28 功能块的 Position 数值(脉冲数);运行时遇到反向限位后,电机停止,伺服驱动器显示 AL014 报警

1

25:原点回归启动后,电机朝正向限位方向运转(第一段速),遇到原点信号上升沿后,电机向相同方向运行,检测到原点信号下降沿时向相反方向运行(第二段速),再次检测到原点信号上升沿时停止,当前位置被设置为 MC_Home_LXM28 功能块的 Position 数值(脉冲数);运行时遇到正向限位后,电机向相反方向运行(第一段速),检测到正向限位下降沿时,电机向相同方向运行(第二段速),检测到原点信号上升沿后停止(第二段速),当前位置被设置为 MC_Home_LXM28 功能块的 Position 数值(脉冲数);运行时遇到反向限位后,电机停止,伺服驱动器显示 AL014 报警


1

26:原点回归启动后,电机朝正向限位方向运转(第一段速),遇到原点信号上升沿后,电机向相同方向运行,检测到原点信号下降沿时停止(第二段速),当前位置被设置为 MC_Home_LXM28 功能块的 Position 数值(脉冲数);运行时遇到正向限位后,电机向相反方向运行(第一段速),检测到原点信号上升沿后,电机向相反方向运行,检测到原点信号下降沿时停止(第二段速),当前位置被设置为 MC_Home_LXM28 功能块的 Position 数值(脉冲数);运行时遇到反向限位后,电机停止,伺服驱动器显示 AL014 报警


1

27:原点回归启动后,电机朝反向限位方向运转(第一段速),遇到原点信号上升沿后,电机向相反方向运行,检测到原点信号下降沿时停止(第二段速),当前位置被设置为 MC_Home_LXM28 功能块的 Position 数值(脉冲数);运行时遇到反向限位后,电机向相反方向运行(第一段速),检测到原点信号上升沿后,电机向相同方向运行,检测到原点信号下降沿时停止(第二段速),当前位置被设置为 MC_Home_LXM28 功能块的 Position 数值(脉冲数);运行时遇到正向限位后,电机停止,伺服驱动器显示 AL015 报警


1

28:原点回归启动后,电机朝反向限位方向运转(第一段速),遇到原点信号上升沿后停止,当前位置被设置为 MC_Home_LXM28 功能块的Position 数值(脉冲数);运行时遇到反向限位后,电机向相反方向运行(第一段速),检测到原点信号上升沿后,电机向相同方向运行,检测到原点信号下降沿时向相反方向停止(第二段速),再次检测到原点信号上升沿时停止(第二段速),当前位置被设置为 MC_Home_LXM28 功能块的 Position 数值(脉冲数);运行时遇到正向限位后,电机停止,伺服驱动器显示 AL015 报警


1

29:原点回归启动后,电机朝反向限位方向运转(第一段速),遇到原点信号上升沿后,电机向相同方向运行,检测到原点信号下降沿时向相反方向运行(第二段速),再次检测到原点信号上升沿时停止(第二段速),当前位置被设置为 MC_Home_LXM28 功能块的 Position 数值(脉冲数);运行时遇到反向限位后,电机向相反方向运行(第一段速),检测到反向限位下降沿时,电机向相同方向运行(第二段速),检测到原点信号上升沿后停止(第二段速),当前位置被设置为 MC_Home_LXM28 功能块的 Position 数值(脉冲数);运行时遇到正向限位后,电机停止,伺服驱动器显示 AL015 报警


1

30:原点回归启动后,电机朝反向限位方向运转(第一段速),遇到原点信号上升沿后,电机向相同方向运行,检测到原点信号下降沿时停止(第二段速),当前位置被设置为 MC_Home_LXM28 功能块的 Position 数值(脉冲数);运行时遇到反向限位后,电机向相反方向运行(第一段速),检测到原点信号上升沿后,电机向相反方向运行,检测到原点信号下降沿时停止(第二段速),当前位置被设置为 MC_Home_LXM28 功能块的 Position 数值(脉冲数);运行时遇到正向限位后,电机停止,伺服驱动器显示 AL015 报警


1

33:原点回归启动后,电机朝反向限位方向运转至电机 Z 相停止(第二段速),当前位置被设置为 MC_Home_LXM28 功能块的 Position 数值(脉冲数),可重复操作;运行时遇到正向限位后,电机停止,伺服驱动器显示 AL015 报警;运行时遇到反向限位后,电机停止,伺服驱动器显示 AL014 报警


1

34:原点回归启动后,电机朝正向限位方向运转至电机 Z 相停止(第二段速),当前位置被设置为 MC_Home_LXM28 功能块的 Position 数值(脉冲数),可重复操作;运行时遇到正向限位后,电机停止,伺服驱动器显示 AL015 报警;运行时遇到反向限位后,电机停止,伺服驱动器显示 AL014 报警


1

35:原点回归启动后,将MC_Home_LXM28 功能块的 Position 数值(脉冲数)设置为当前位置
正向限位:P2-1x 参数:16#0x23;报警时驱动器显示:AL015
反向限位:P2-1x 参数:16#0x22;报警时驱动器显示:AL014
在以上的原点回归模式中,如果有用到限位和原点信号,必须通过 DI 点进行设置,否则执行功能块时功能块的错误代码为 75



欢迎关注:我们提供丰富的产品信息,优秀的技术服务与支持。微信搜索公众号:众力达电气,微信号:hnzlddq,客服电话:0371-66617266.
长按识别图中二维码,一键关注代理品牌: 施耐德、台达、西门子、和泉、卓蓝减速机、德力西等。专业维修:变频器、PLC、伺服电机、驱动器、人机界面等。
来源:网络
声明:本文转载自网络,文章内容仅供学习、交流之用,本公司对文中观点保持中立。文章版权归原作者及平台所有。如有侵权,请联系删除。
