
人形机器人虽能完成空翻、马拉松和复杂舞步,但在工业流水线上仍局限于简单搬运任务。面对精密零部件装配、插拔等操作,当前具身智能设备普遍存在局限。这一矛盾的核心在于机器人缺失"触觉闭环"。尽管伺服电机、高频运控算法和VLA大模型提升了运动能力,触觉感知却成为制约工业落地的关键短板,催生了触觉传感器市场的快速增长。
与"赢家通吃"的演进路径不同,触觉传感器行业呈现多技术路线并行态势。压阻式、电容式、视触觉、磁电式等方案持续迭代,资本与技术加速涌入,国际传感器大厂也相继布局。
视触觉:借数采东风出货

作为高分辨率触觉传感器的新兴路线,视触觉传感器凭借国内成熟的LED、感光元件产业链,将研发重点聚焦在工程结构优化、弹性材料配方改良和图像解算算法迭代上。
戴盟机器人独创单色光图案追踪技术,相比行业常见的三色光方案,显著降低了光源成本与数据量,同时解决散热难题。视触觉传感器因输出图像信息,可提供多维度数据并适配大模型,虽当前成本较高,仍被客户视为理想技术路线。

有研发负责人指出,视触觉方案因构造和工艺相对复杂导致成本偏高,但量产规模扩大后价格将下探。下游应用市场正提前打开出货通道,如UMI数据采集方案可独立完成触觉数据采集,降低部署成本。一目科技表示,楔形结构视触觉传感器凭借更大接触面积,有望在UMI市场迎来需求爆发。
压阻式:打破低端刻板印象

压阻式触觉传感器凭借结构简单、易于大面积阵列化等优势,率先实现触觉普惠。福莱新材2025年完成三次产品迭代,其第三代柔性传感器集成触觉处理单元(TPU),可在指尖完成数据处理。据调研,在灵巧手应用场景中,压阻式与电容式因成本优势仍是主力方案。
针对压阻式在切向力感知的先天缺陷,猿声科技采用"空间编码的多维压阻"创新路径:通过超高密度单维压阻敏感层与半导体工艺集成的空间编码层,结合算法重构多维力场,实现0.01N精度的多维力测量。其执行副总裁陈竹霖表示,半导体工艺的应用大幅提升了量产能力与成本控制。

磁电式:国际大厂入局

国际传感器巨头凭借技术积累,通过"跨界迁移"切入机器人触觉领域。迈来芯基于汽车领域验证的Triaxis磁传感器技术,开发出Tactaxis触觉传感器及预处理触觉指尖模块MLX90901。其采用梯度测量方法抵抗杂散磁场干扰,确保测量稳定性。
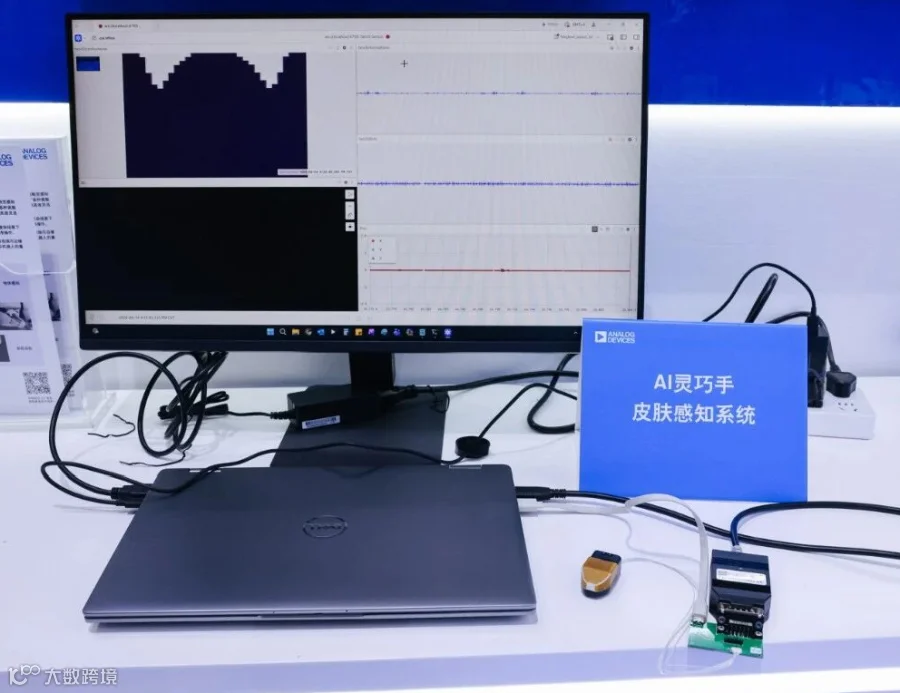
ADI在Sensor Shenzhen 2026展示AI灵巧手皮肤感知方案,支持32×32高分辨率触觉阵列,集成振动传感器、微型麦克风和IMU。中国区市场总监蔡振宇指出,该方案通过多通道模拟前端与边缘AI计算平台,实现kHz级数据采样与实时推理,并正在开发抗干扰能力更强的磁感应传感器。
高工机器人拍摄
触觉传感器"进厂",依旧挑战重重

触觉传感器正解决传统视觉方案的工业痛点。例如新能源电池检测中,可精准区分空包(可返工)与鼓包(需回收)缺陷;在精密插拔场景,配合"最后一厘米"算法,实现0.01N高精度力分辨,达成无人工干预作业。
图源:一目科技
但行业仍面临三大共性问题:
- 技术路线未收敛导致数据标准真空,阻碍跨方案数据复用与VTLA大模型训练
- 采样频率普遍为100Hz,需提升至300-500Hz以满足超高速操作需求
- 多数方案聚焦微小力测量精度,重载场景需开发超宽域量程传感器
随着机器人进入复杂生产环境,触觉将成为决定"操作能力"的关键变量。目前触觉传感器尚处于多路线并行探索阶段,不同技术路线将在细分场景持续验证迭代。