

点击蓝字 关注我们

产品总体概述
产品简介
中型多模态作业型ROV是一款适用于水下应急救援的搜救型ROV,该ROV拥有坐底与悬浮两种作业方式,采用水下云台摄像机、前视声呐、3D实时动态扫描系统以及机械臂提供海底搜索、救援等任务。

性能参数
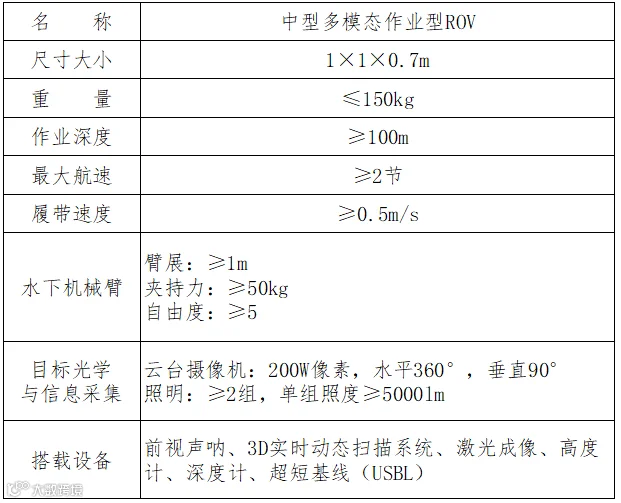
产品特点与优势
水下作业与机械操作
搭载5自由度水下机械臂,最大臂展1m,夹持力50kg,与ROV本体协同作业,支持精准定位与精细操作。

水下机械臂示意图
目标光学与信息采集
前置200W像素云台摄像机,支持360°水平旋转和90°垂直俯仰,提供全方位高清视觉。搭载两组可调节亮度LED灯,单组照度5000lm,为水下作业提供充足照明。


深水网络摄像机示意图
水下照明灯示意图
水下感知与成像系统
配备前视声呐系统,实现实时声呐成像探测,可在低能见度环境下进行障碍物识别与地形测绘。
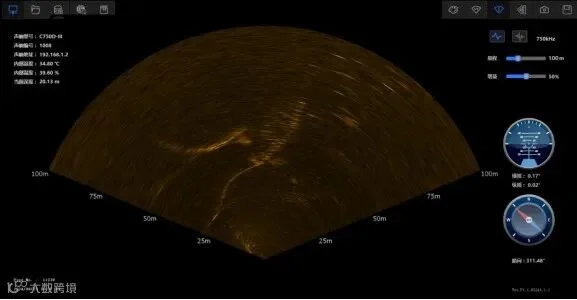
声呐探测图像示意图
集成3D实时动态扫描系统,可生成水下环境的3D动态图形,辅助作业决策。
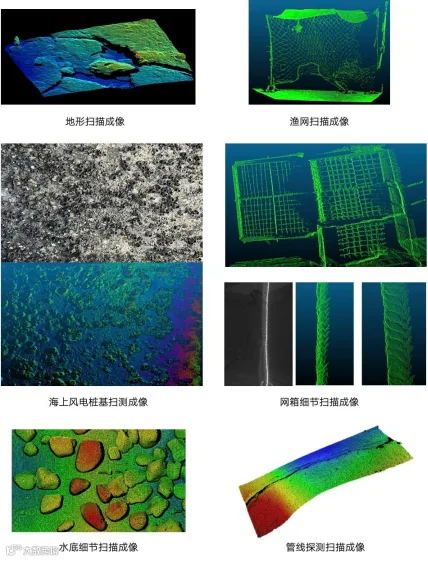
扫描图像示意图
应用领域与案例
该ROV可用于近海海底探测,海底搜救等工作。搭载的动态扫描系统,可高效快速地完成水下各种搜救探测任务,对水下救援等任务具有十分重要的意义。
威海某货运港口码头经长期运营,桩基水下部分出现海水侵蚀、浮渣堆积等问题,需对码头桩基水下0-15m部分进行全面勘查,同时清理桩基周边的浮渣、小型沉物,作业水深约10m,港口航道船舶通行频繁,要求作业设备灵活、高效。


港口码头桩基水下勘查作业
水下实时影像
操控ROV以悬浮模式对码头桩基进行逐根扫描,通过云台摄像机360°全方位拍摄桩基表面状况,配合前视声呐探测桩基周边浮渣堆积范围及水下沉物;利用机械臂对桩基周边的浮渣、小型沉物(如废弃钢管、塑料浮体)进行抓取与清理,对桩基冲刷区域进行标记。

机械臂抓取浮屑
ROV 在港口船舶通行的复杂环境中实现灵活作业,未影响港口正常运营;成功完成50根码头桩基的水下勘查,排查出 5处桩基侵蚀区域和8处浮渣堆积严重区域;机械臂清理桩基周边浮渣及沉物约20kg,为码头桩基的后续防腐、加固工程提供了精准的水下数据,保障了港口码头的结构安全。
海洋智装公司坚定不移地贯彻“服务国家战略不动摇,服务集团转型不偏离”的要求,积极布局海洋未来产业,努力推进水下技术创新。以合作为纽带,携手产学研用各方,共建开放共赢生态,引领智慧海洋新时代,矢志成为海洋科技领域的标杆企业,为国家海洋强国战略注入澎湃动能。

分享让更多人看看