点击蓝字 关注我们


一、参考点的建立
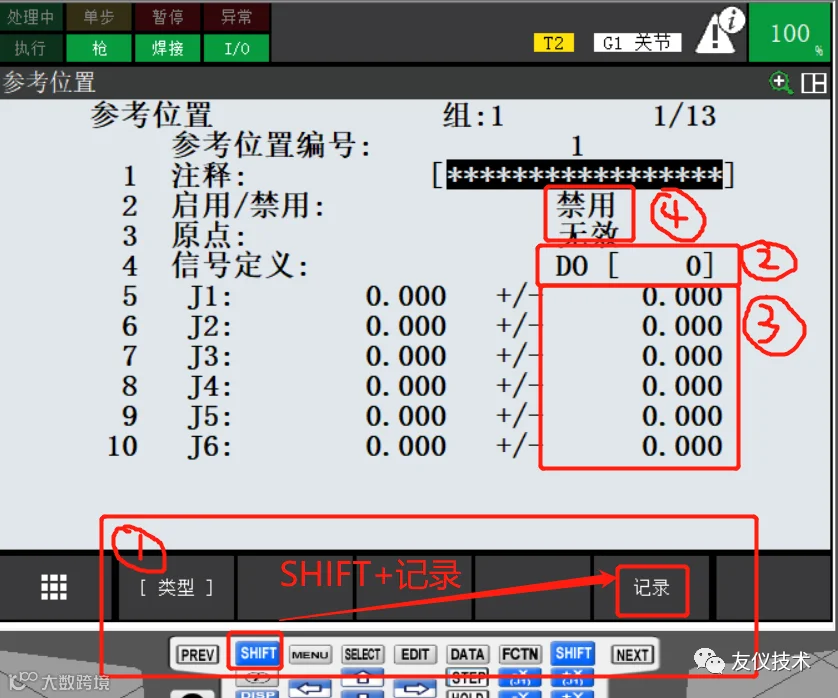
①参考点定义:机器人参考位置是在运行程序中或手动运行过程中频繁使用的固定位置(预先设定的位置)。
②参考点意义:在参考位置可以触发一个自己设置的位置触发输出信号。
③设置对象:机器人本体、外部轴。
④设置方法:如下图。


二、用户坐标和工具坐标的使用与标定
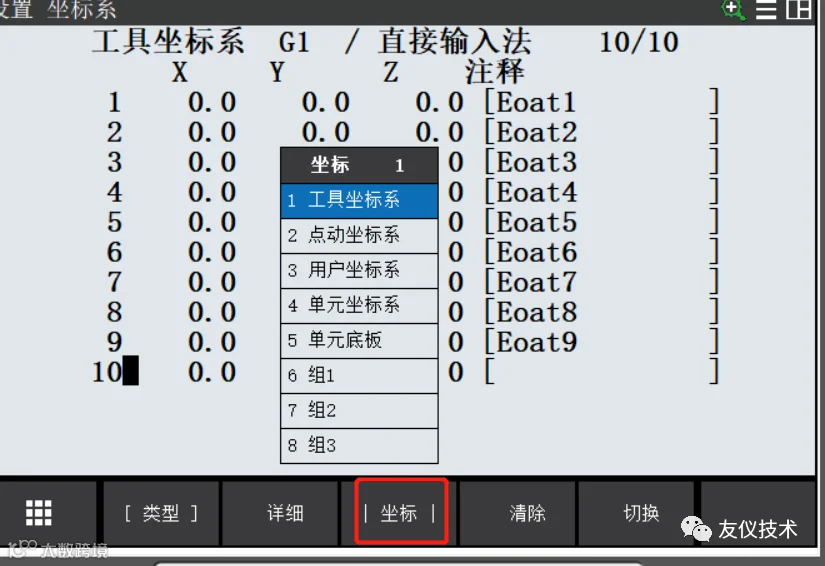
①坐标系种类:根据坐标、用户坐标、关节坐标、全局坐标。
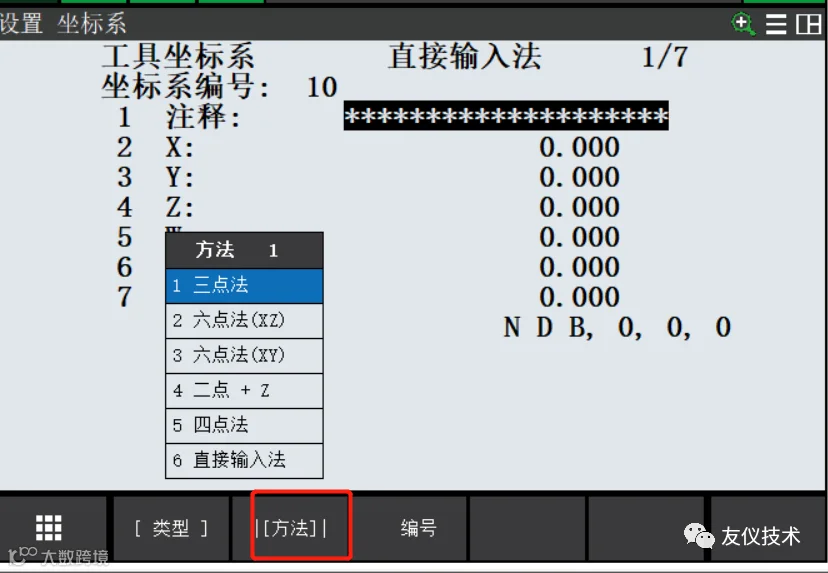
②坐标系方法:六点法和三点法(用户坐标用三点法即可)。
③坐标系切换:示教器”COORD”键盘,按下进行切换。
④设置方法:如下图。

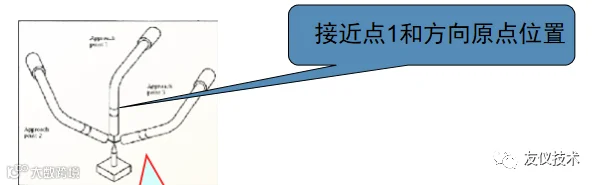
六点法详细步骤(接近点1和方向原点设置)
a.移动光标接近点1(Approach point1)。
b.切换坐标系(COORD)至全局坐标(WORLD)后移动机器人,找准TCP中心点。
c.按SHIFT+F5(RECORD)位置记录。
d.移动光标到方向原点(Orient Origin Point)。
e.按SHIFT+F5(RECORD)位置记录。
排版是门技术活六点法详细步骤(定义方向点)
a.移动光标到X方向点(X Direction Point)。
b.切换坐标系(COORD)至全局坐标(WORLD)后移动机器人。
c.移动机器人,使工具沿所需要设定的+X方向至少移动250mm。
d.按SHIFT+F5(RECORD)位置记录。
e.移动光标到方向原点(Orient Origin Point)
f.按SHIFT+F4[MOV TO]位置移动,使机器人恢复到方向原点(Orient Origin Point)位置。
g.移动光标到Z方向点(Z Direction Point)。
h.切换坐标系(COORD)至全局坐标(WORLD)后移动机器人。
i.移动机器人,使工具沿所需要设定的+Z方向至少移动250mm。
j.按SHIFT+F5(RECORD)位置记录。
六点法详细步骤(接近点2设置)
a.移动光标到X方向点(X Direction Point)。
b.切换坐标系(COORD)至全局坐标(WORLD)。
c.移动机器人,沿全局坐标(WORLD)+Z方向移动50mm左右。
d.移动光标接近点2(Approach point2)。
e.把示教坐标切换成关节(JOINT)旋转J6轴至少90度,不要超过180度。
f.切换坐标系(COORD)至全局坐标(WORLD)。
g.移动机器人使工具尖端触碰准点。
h.按SHIFT+F5(RECORD)位置记录。
i.移动机器人,沿全局坐标(WORLD)+Z方向移动50mm左右。
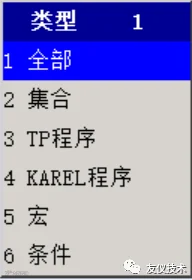
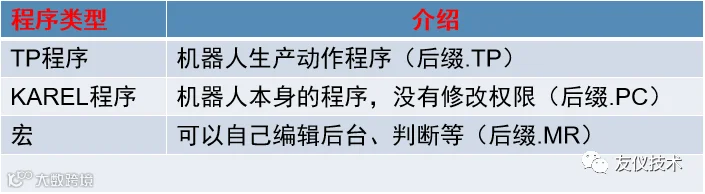
三、程序的架构
程序类型介绍
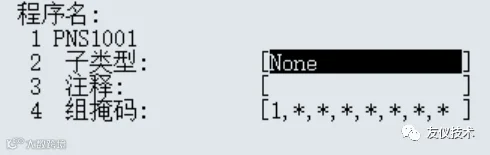
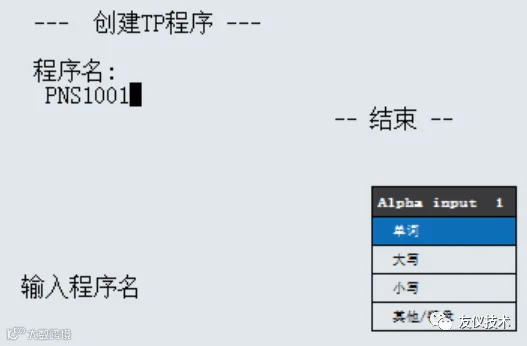
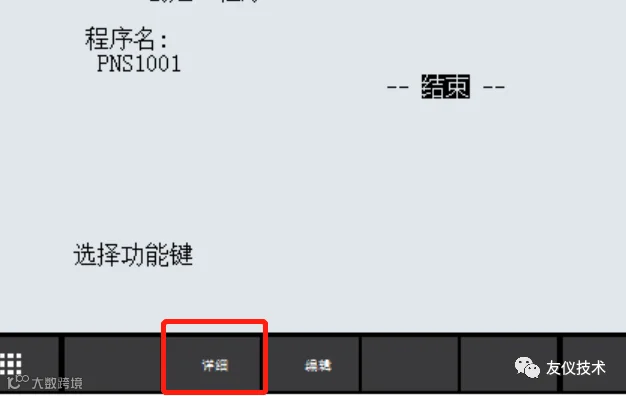
程序创建

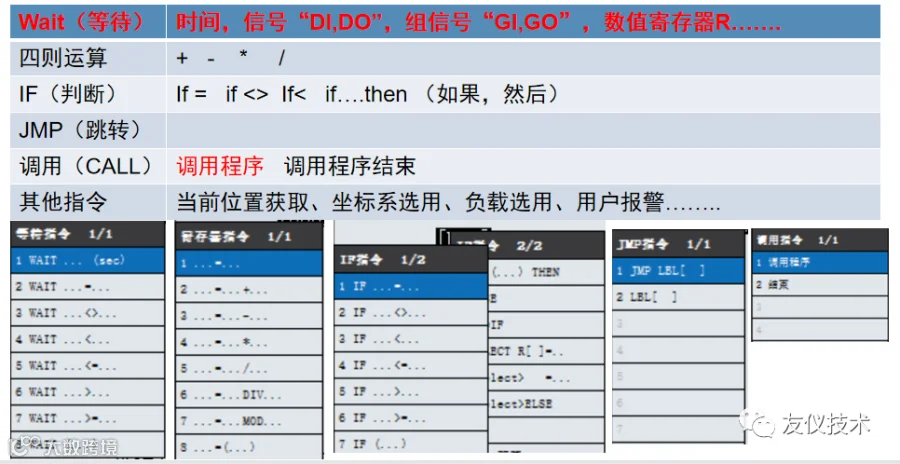
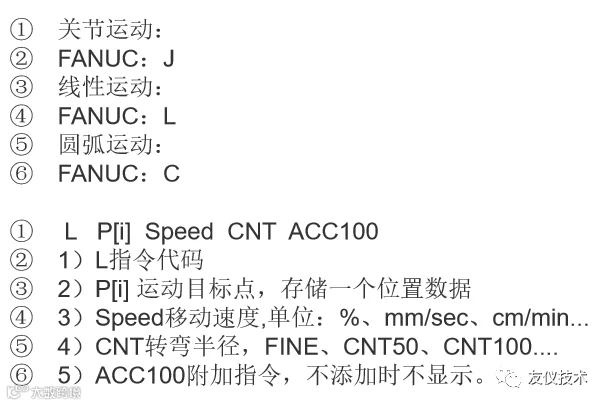
6.2.1运动指令
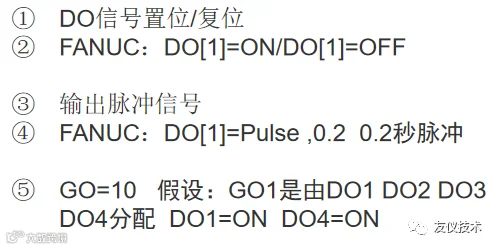
6.2.2IO控制指令
6.2.3其他指令