ABB机器人如何零点校准
工业机器人的零点怎么恢复?本期小编将给大家介绍,ABB机器人如何调零;
记住!用锤子锤两下是不能解决问题的!

更换电机或传输SMB相关部件时导致零点丢失
更换电池时断电的时候(机器人更换电池必须带电更换),机器人关节轴发生了移动。控制系统断开时移动机器人轴导致零点丢失
转数计数器与SMB在开机情况下断开通信。即分解器和测量电路板间信号中断,导致零点丢失;
硬件异常,如更换电机和本体线、或分解器错误,导致零点丢失;
重新组装机器人;
这里我们以ABB IRB1200 为例,在 ABB 机器人系统中,零点校准被定义为 “更新转数计数器”
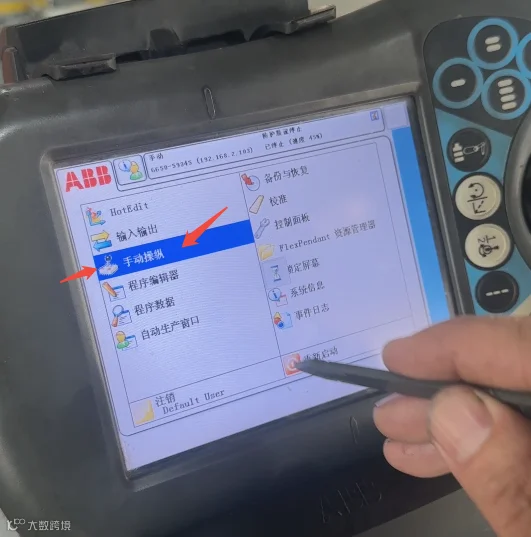
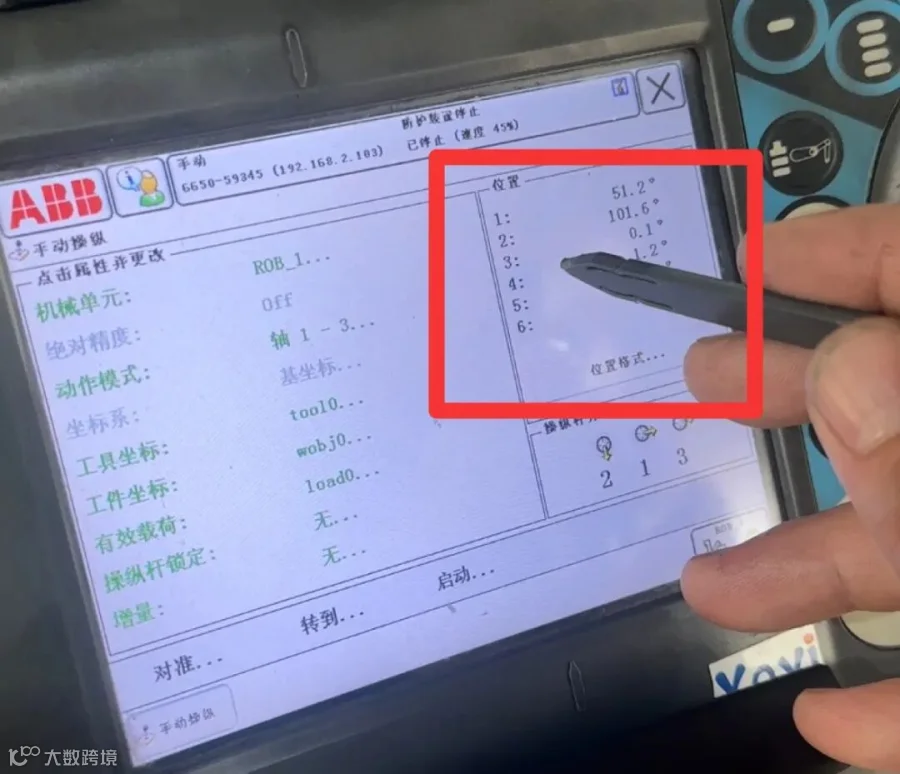
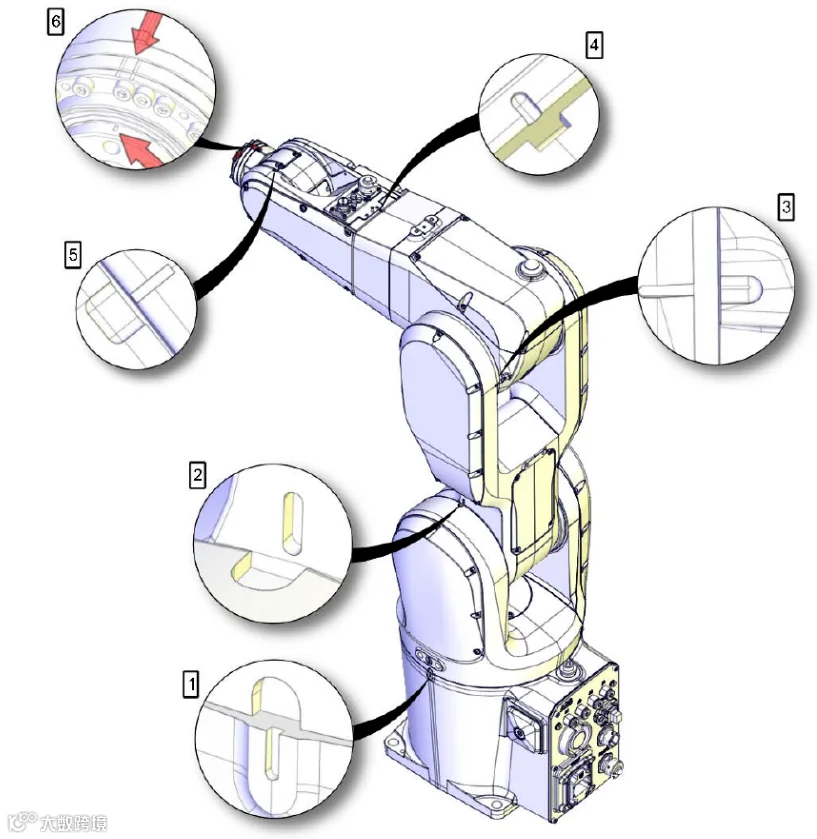
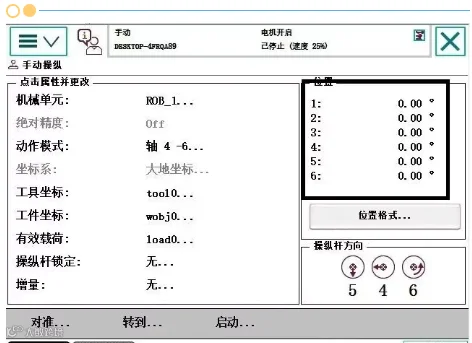
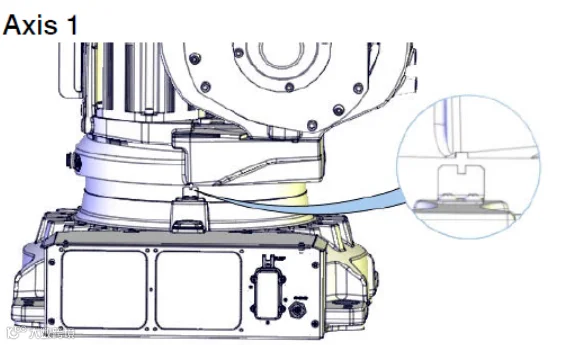
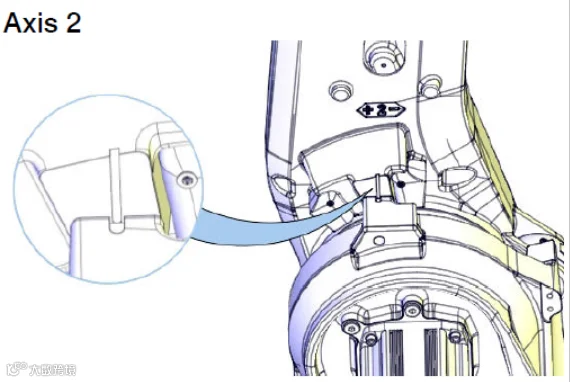
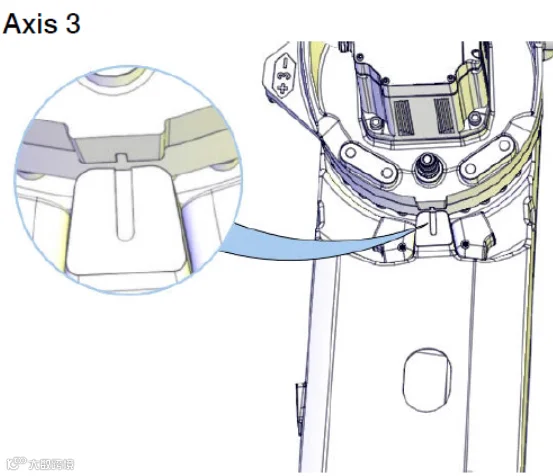
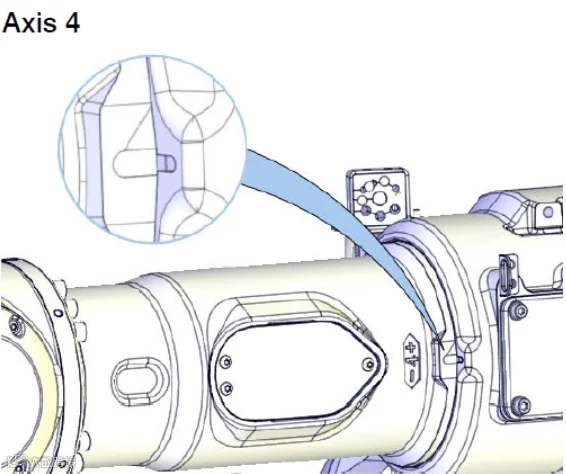
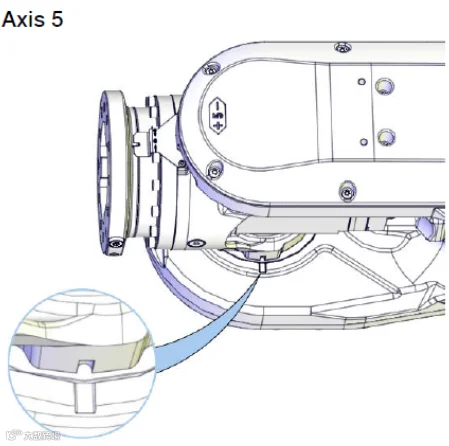
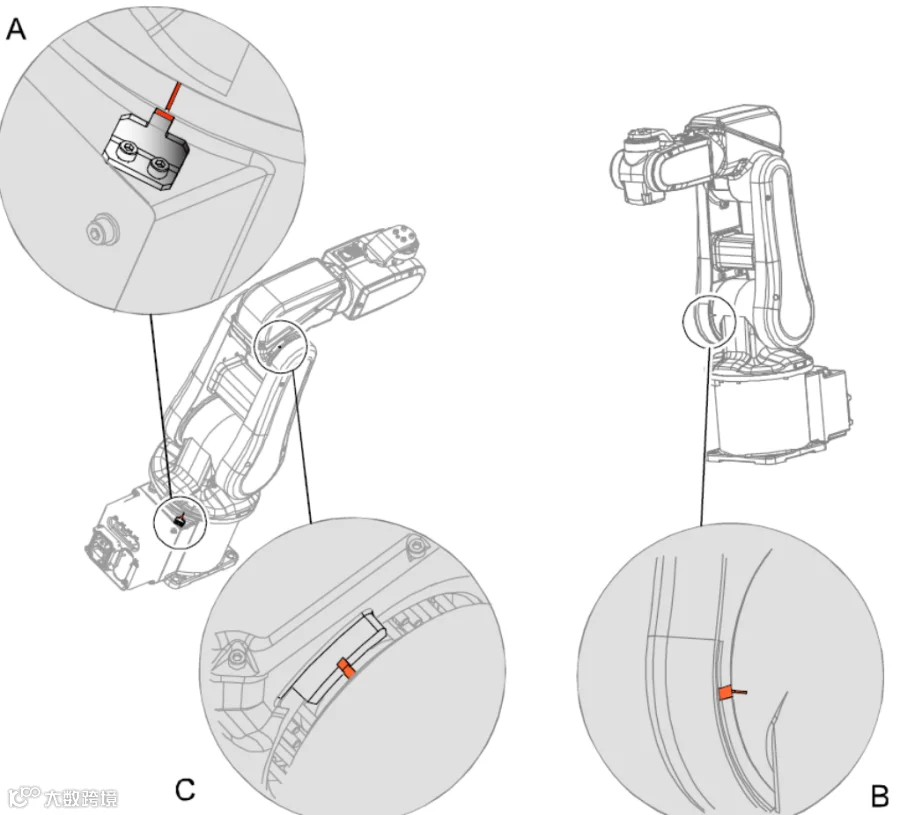
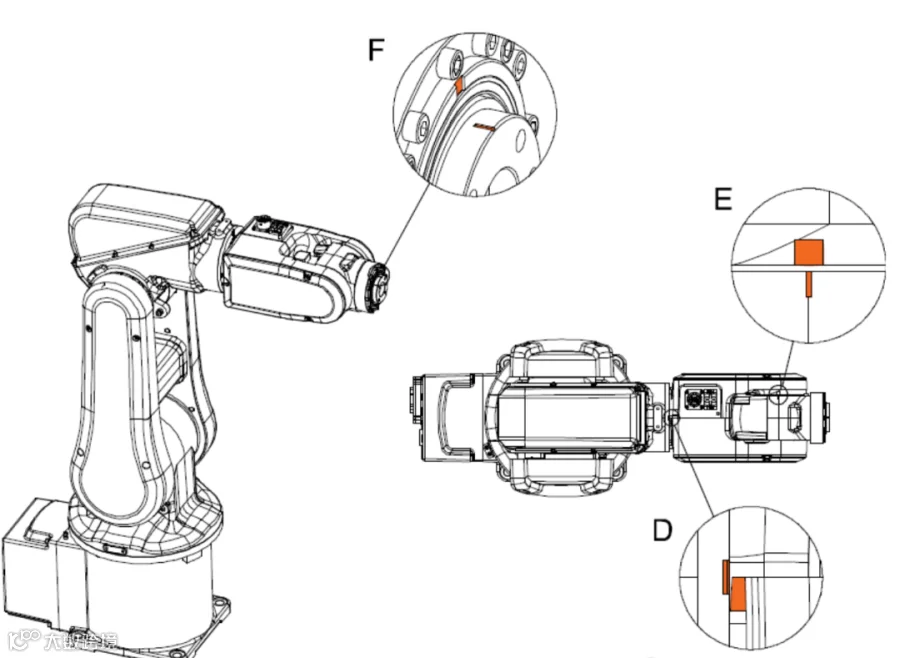
选择手动操纵模式,根据机械零点的示意图,将所需调零的关节运动至机械原点刻度位置
机器人到达机械零点后,手动操作画面中各轴的度数不一定为0度;
对于大机器人,由于人观察视角的原因,建议先将4~6轴调回机械原点,再将1~3轴调回机械原点;
机器人回到机械零点后,回到主菜单,再点击“校准”页面。
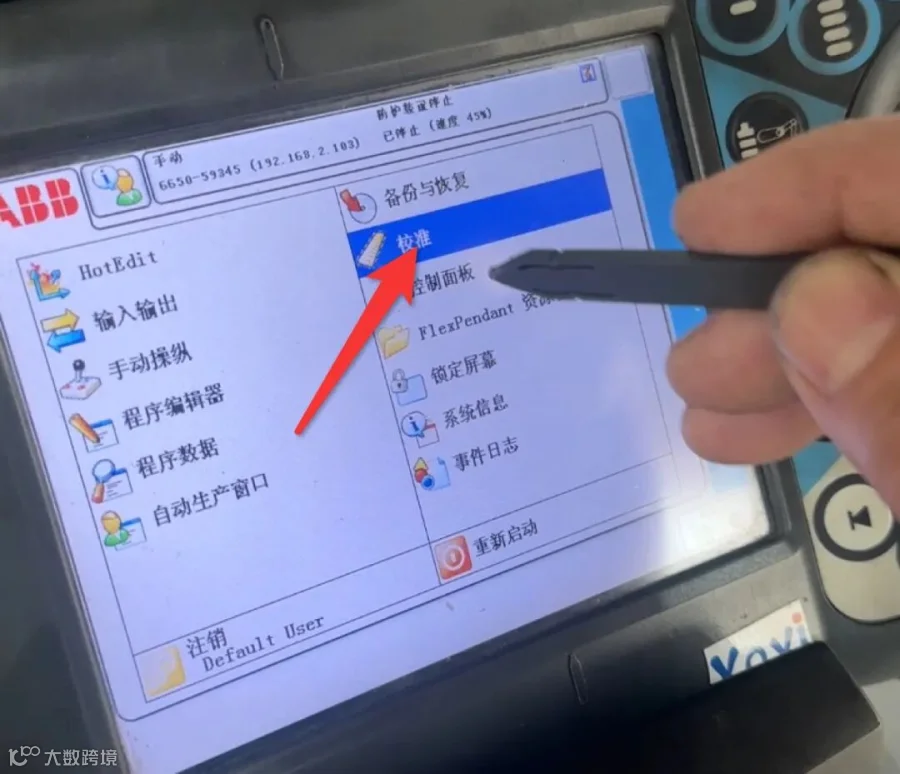
点击需要校准的机器人(特殊情况:一个控制柜连接多个机械臂或机械单元的情况下,会像是多个选项)
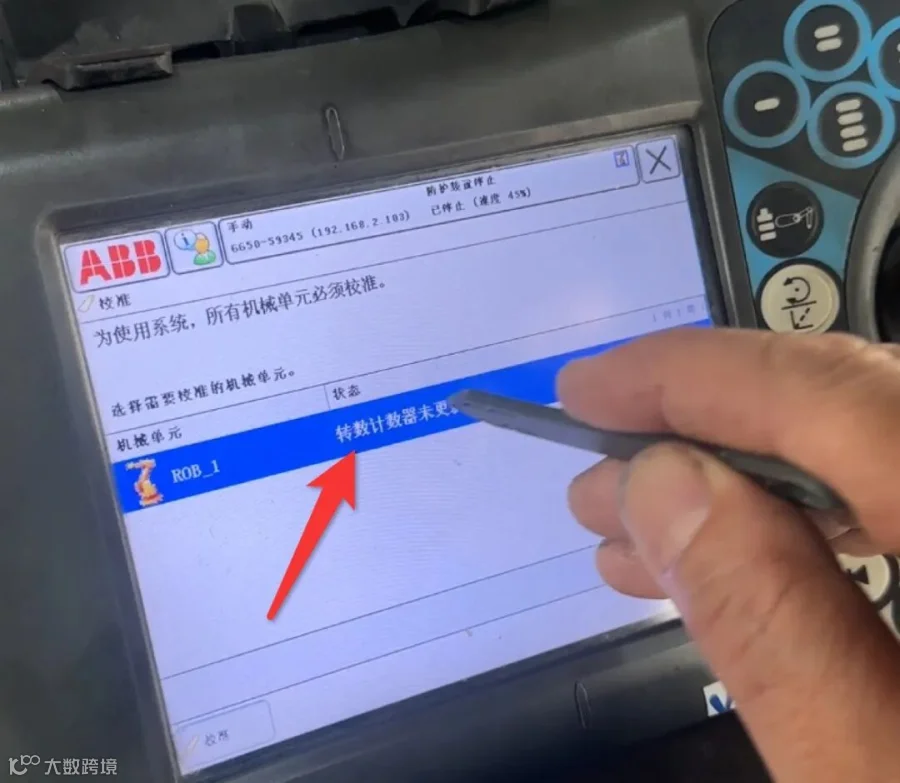
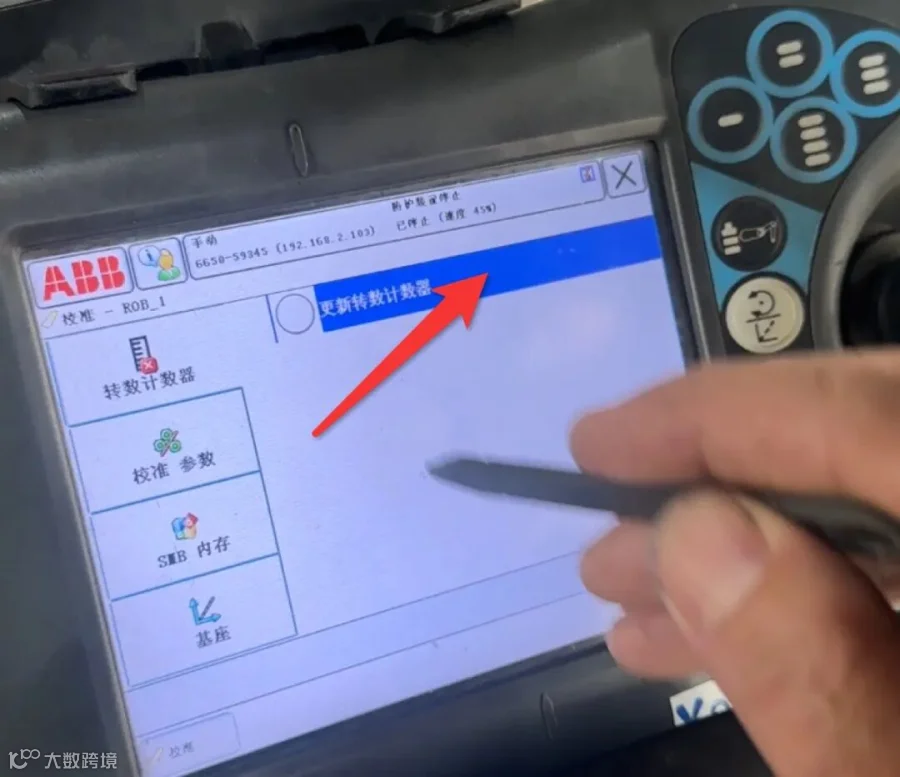
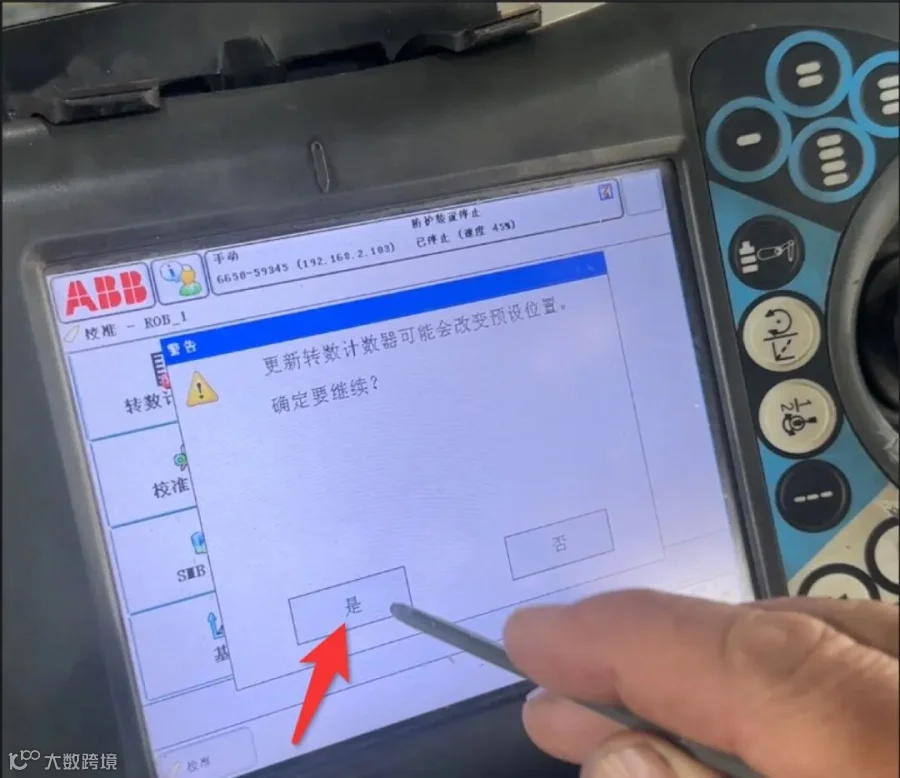
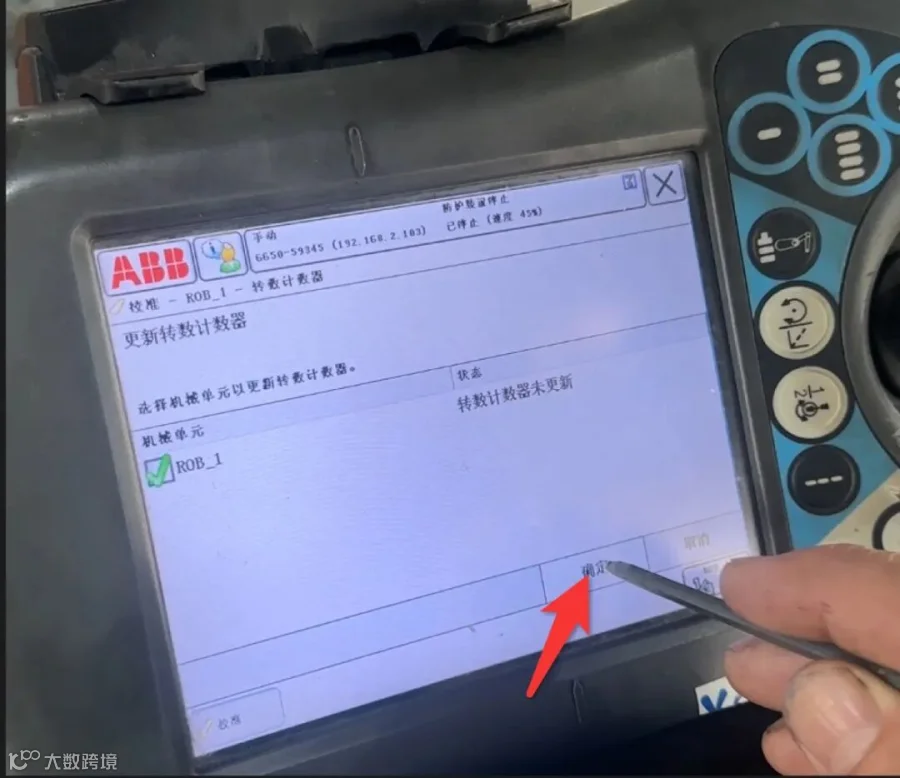
点击“更新转数计数器”,并点击“是”
选择需校准的机器人,并点击“确定”
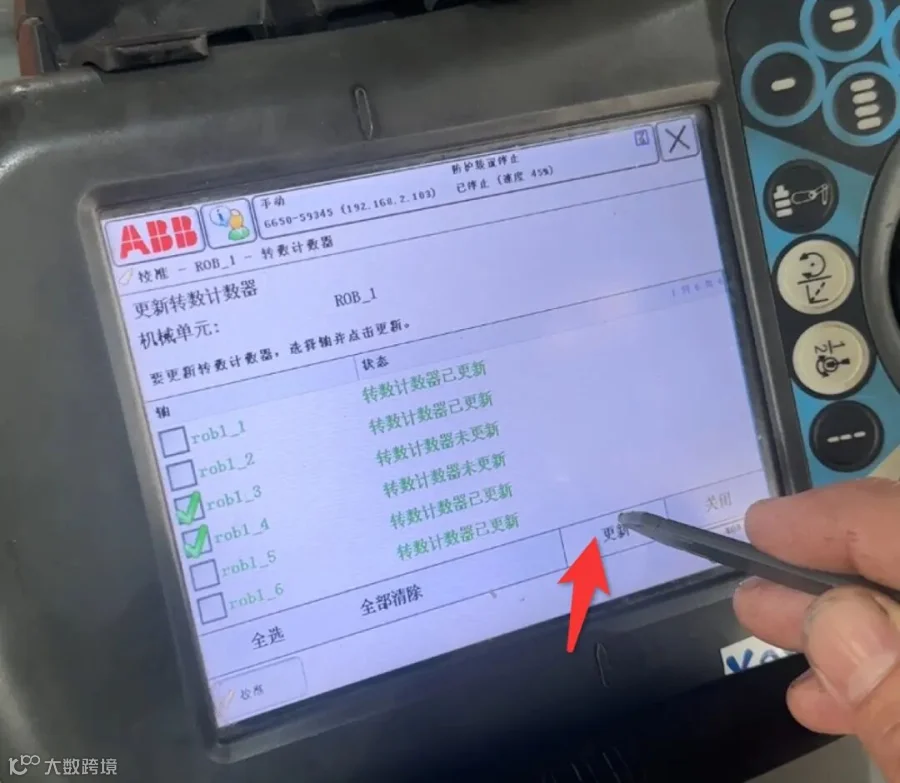
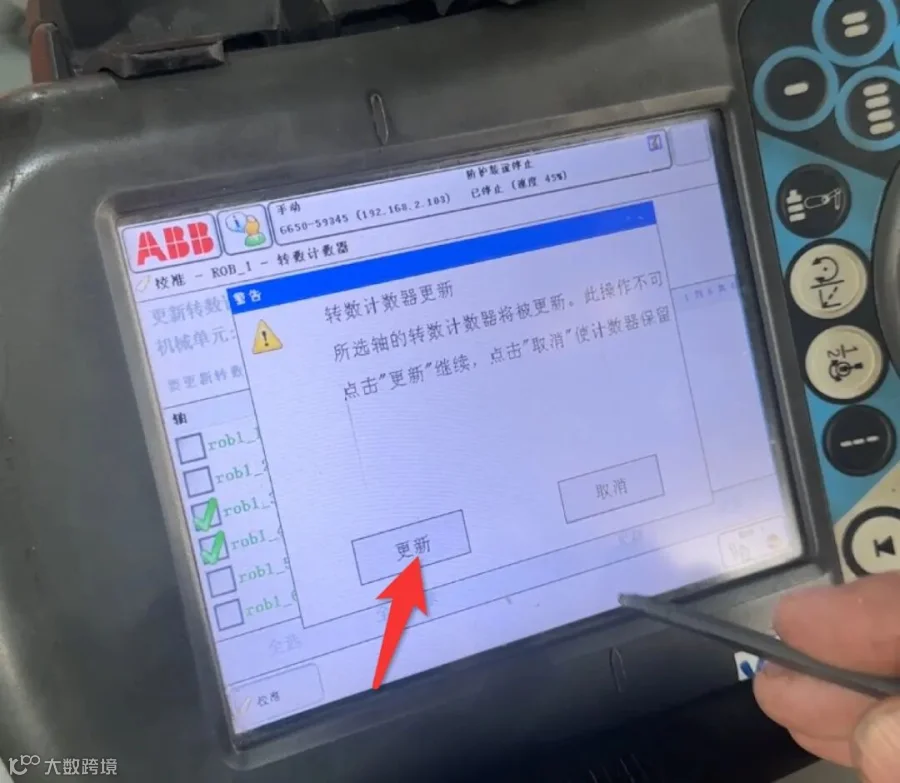
可以全选后点更新。也可以单独选择某一个轴或几个轴,并点击“更新”,再点击更新
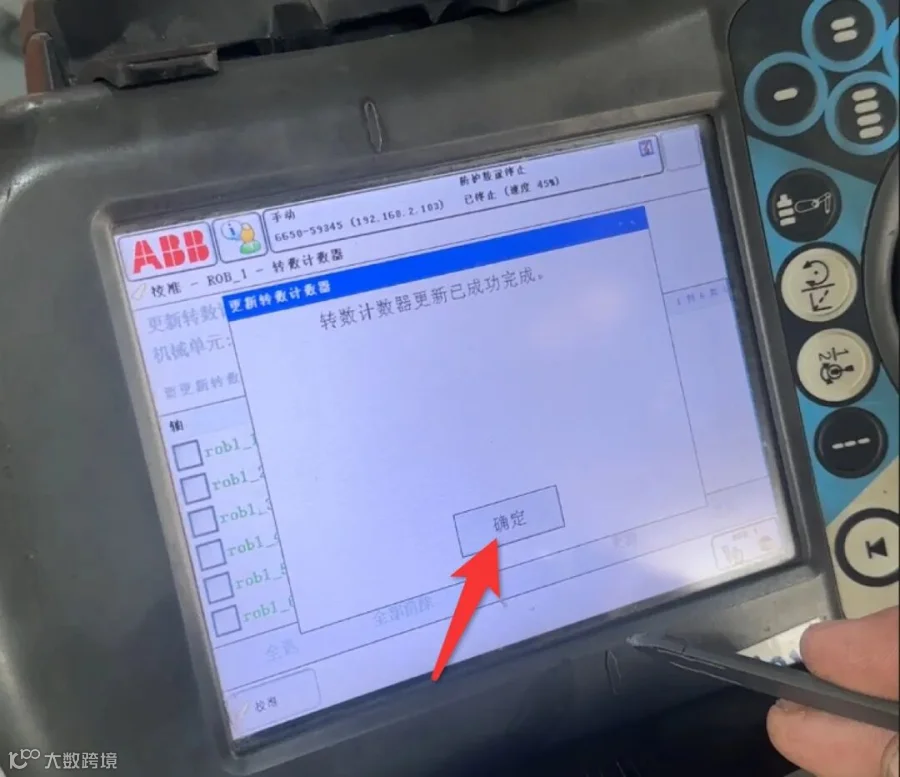
零点更新完毕,点击“确定”
10.再返回手动操纵界面,可看到校准后的度数
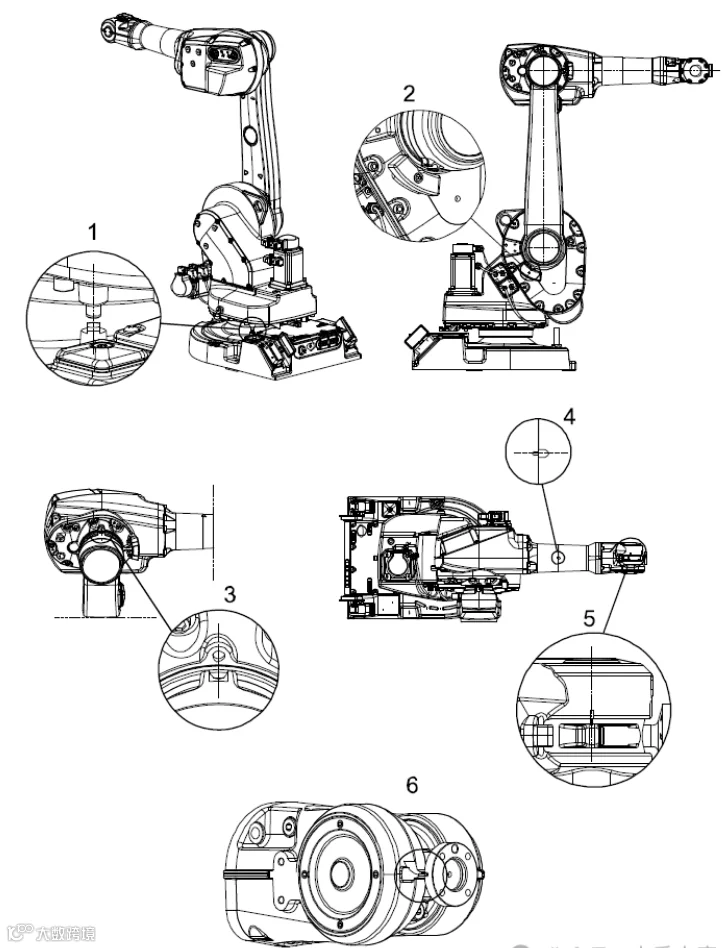
ABB机器人其他型号零点示例图:
IRB6700

IRB120
IRB1600
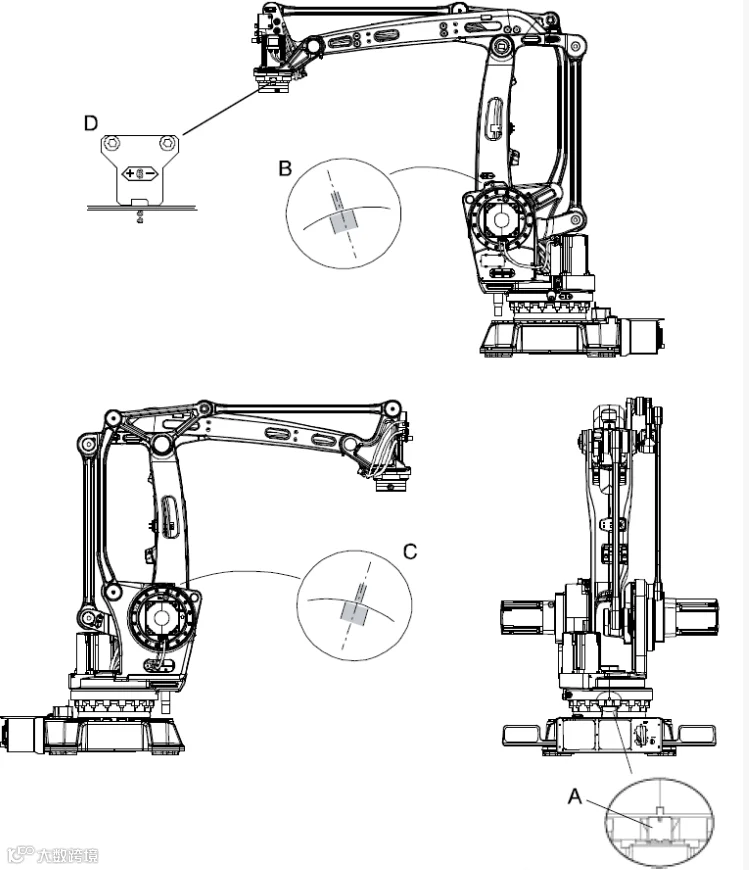
IRB460
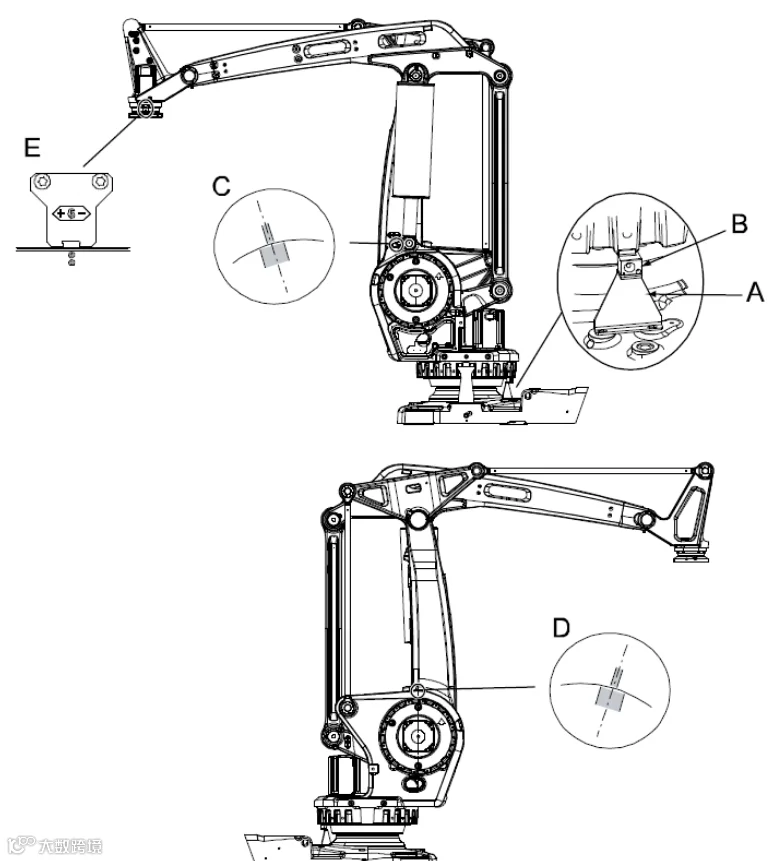
IRB660
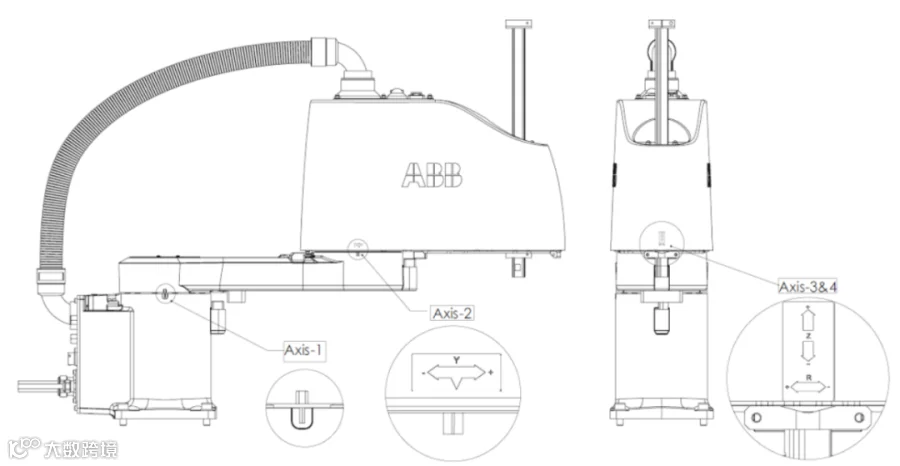
IRB910SC
往期内容回顾(点击查看):