一、频域法
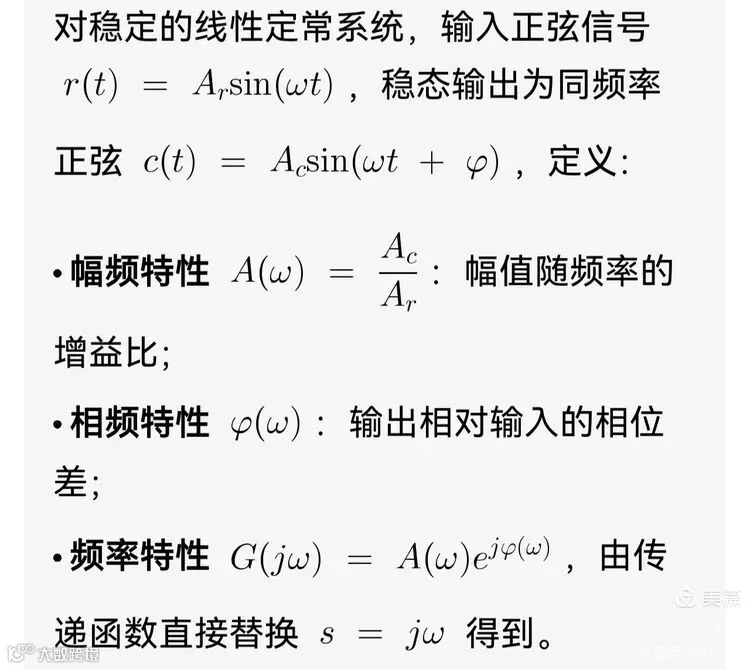
频域法是线性定常系统(又称线性非时变系统,Linear Time-Invariant System)常用工程方法,通过频率特性描述系统对不同频率正弦输入的稳态响应,以图解方式完成稳定性判定、相对稳定性量化与性能设计,无需求解微分方程或特征根,兼具理论严谨性与工程实用性。
频率特性是传递函数在复频域虚轴上的取值,保留了系统全部极点与零点信息,是频域与复频域的桥梁。
三种常用图示工具:奈奎斯特图 、伯德图 、尼科尔斯图 。
二、奈奎斯特图
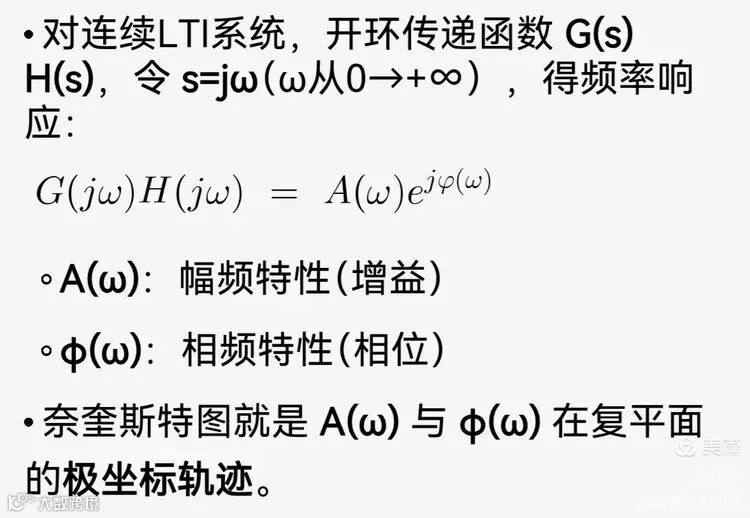
奈奎斯特图是控制工程中用于分析系统稳定性的一种图形化频域方法。它通过绘制开环传递函数在频率ω从0变化到+∞时的矢量端点轨迹,来直观判断闭环系统的稳定性。
1. 数学基础
2. 定义与绘制
奈奎斯特图是开环频率响应G(jω)H(jω)的极坐标图。横轴为实部,纵轴为虚部。点到原点距离=|G(jω)H(jω)|(幅值),与正实轴夹角=∠G(jω)H(jω)(相位)。随着频率ω变化,该复数在复平面上的轨迹即为奈奎斯特曲线。
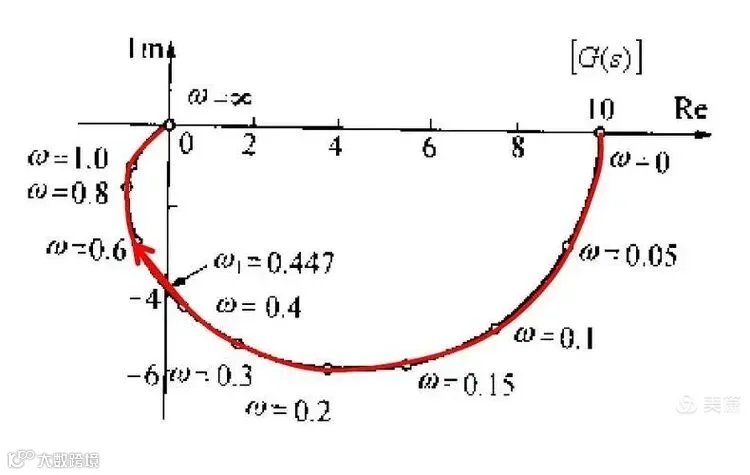
s=jω(ω取0→+∞),其奈奎斯特图:
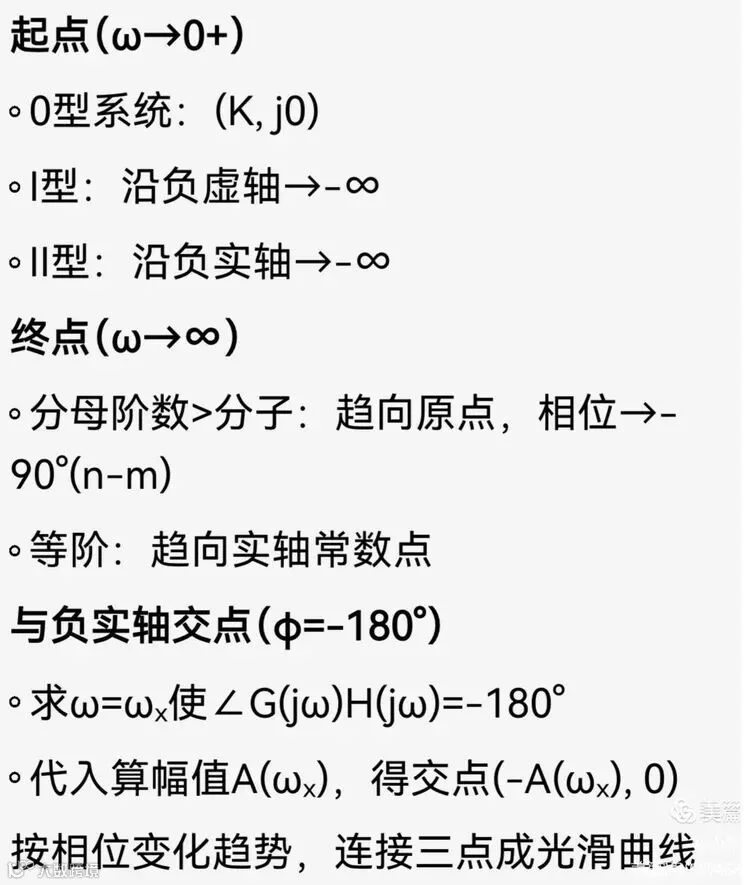
绘制方法(三点法)
3. 奈奎斯特稳定判据
奈奎斯特稳定判据的数学基础是复变函数的幅角原理,通过s平面→F平面→GH平面的映射,把闭环稳定性转化为开环频率特性对(-1,j0)点的包围次数判断。
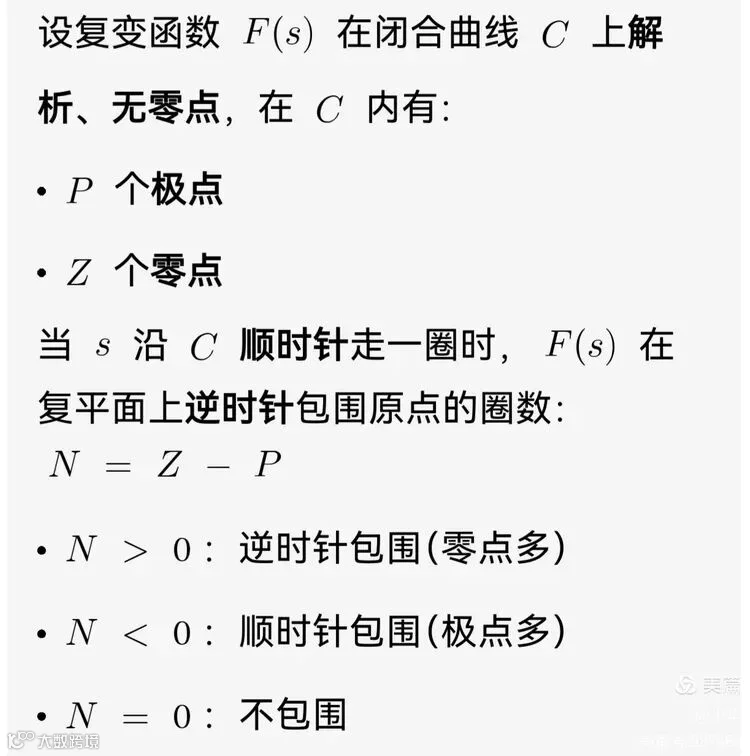
幅角原理
闭环系统稳定的充要条件,取决于开环频率响应曲线 G(jω)H(jω)在复平面上绕点 (−1,j0) 的净圈数 N,与开环传递函数在右半s平面的极点数 P 之间的关系。
P:开环传递函数 G(s)H(s)在右半s平面(实部 > 0)的极点个数。
N:当频率 ω 从 −∞变化到 +∞时,开环奈奎斯特曲线逆时针绕点 (−1,j0)的圈数(顺时针绕行为负值)。
常用应用场景与处理规则
1) 开环稳定系统(P = 0)
若开环系统本身稳定(即右半平面无极点),则闭环系统稳定的充要条件是:奈奎斯特曲线不包围点 (−1,j0)(即 N=0)。
2) 开环不稳定系统(P ≠ 0)
若开环系统有 P个右半平面极点,则闭环系统稳定的充要条件是:奈奎斯特曲线逆时针包围点 (−1,j0)恰好 P圈(即 N=P)。
3) 开环传递函数含积分环节
当开环传递函数在虚轴上存在极点(如积分环节 1/s)时,奈奎斯特路径需进行修正:在原点附近添加一个半径趋近于0的小半圆,从右侧绕过虚轴上的极点。或者,更常用的方法是:绘制 ω从 0+到 +∞ 的曲线,并补充一条从 ω=0+沿无穷大圆弧到 ω=0−的辅助线,形成闭合曲线,再判断其包围 (−1,j0)的情况。
4) 临界稳定情况
若奈奎斯特曲线恰好经过点 (−1,j0),则系统处于临界稳定状态(存在纯虚根)。
一个简单例子
考虑开环传递函数 G(s) = 1/(s+1)。其频率响应为 G(jω) = 1/(1+jω)。可以计算出:
当 ω=0 时,G(j0)=1,位于点(1, j0)。
其奈奎斯特图是一个位于第四象限、从(1, j0)点出发最终趋于原点的半圆。由于开环右极点P=0且曲线不包围(-1, j0)点,因此对应的闭环系统稳定。
4. 典型奈奎斯特图例
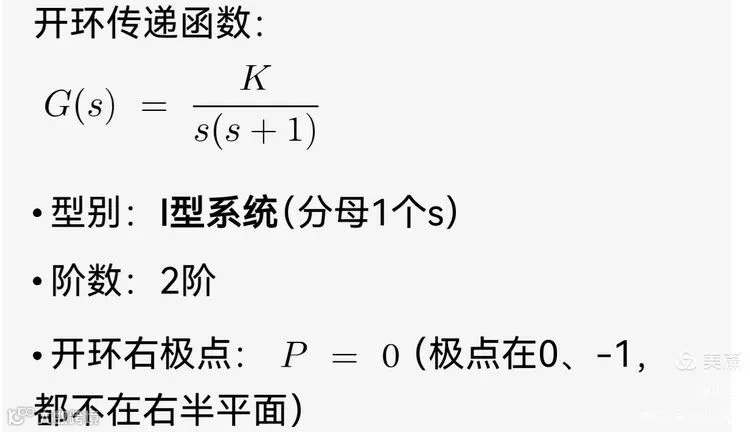
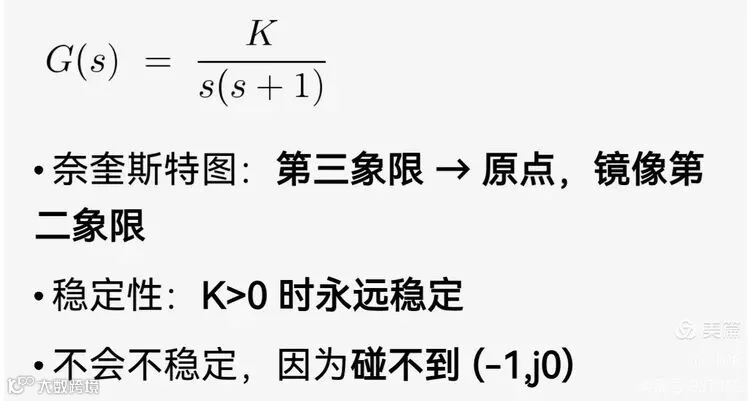
举题1: 画奈奎斯特图 + 判稳定的典型例题,传递函数如下
1) 系统信息
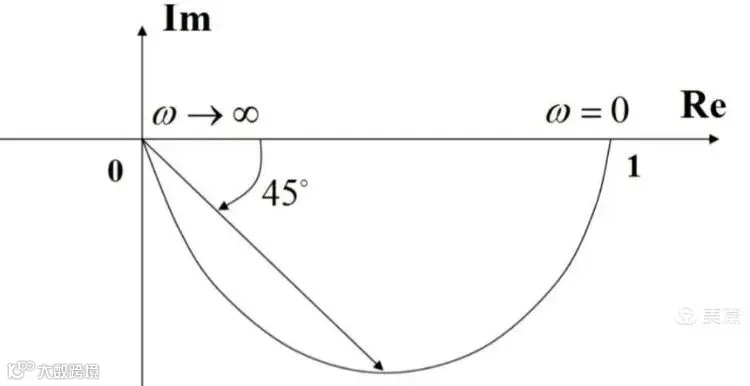
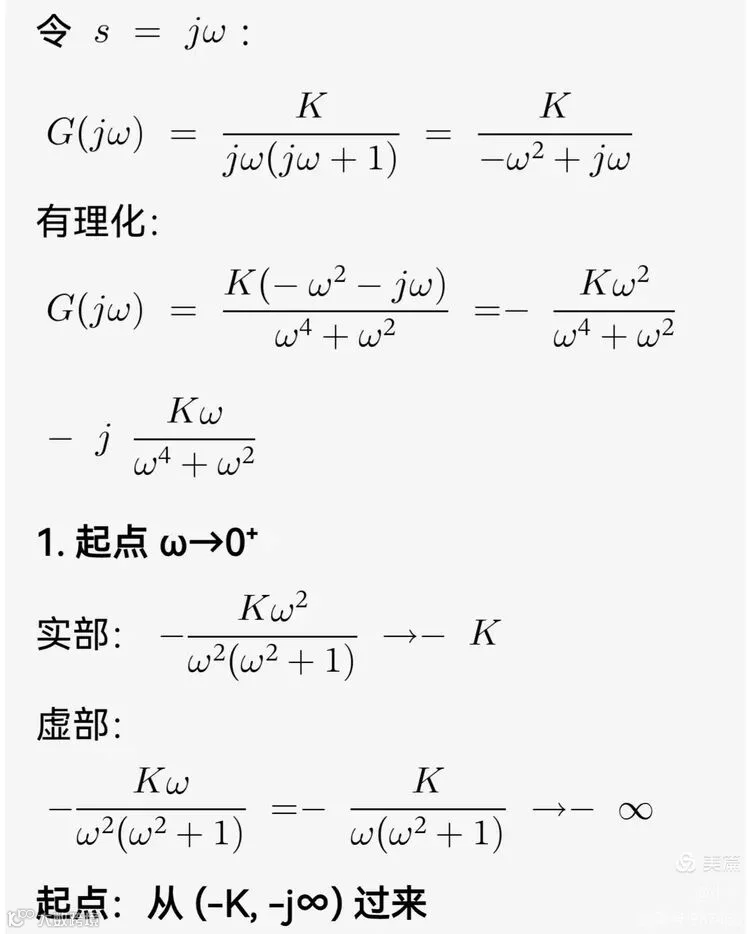
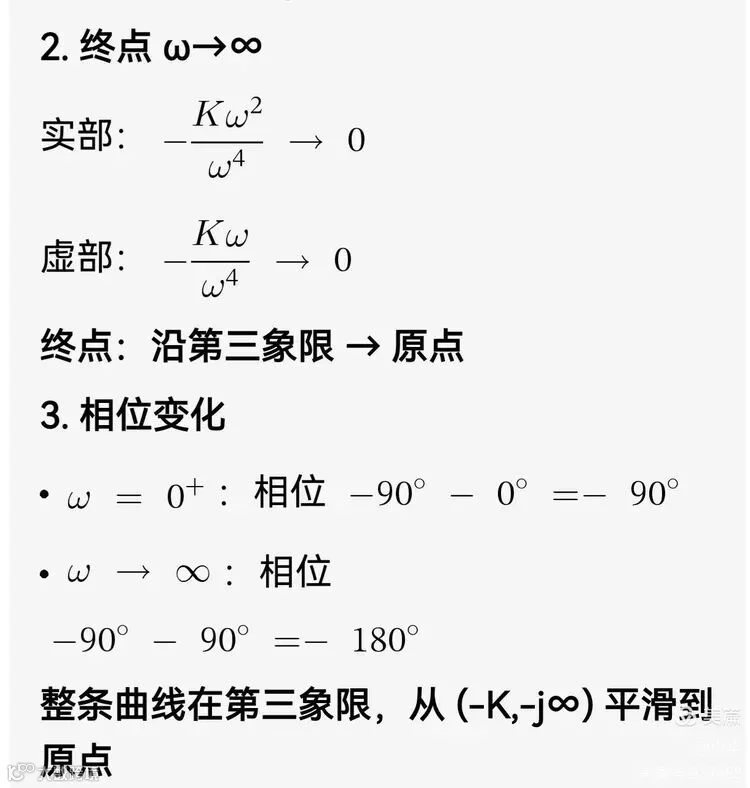
2) 画奈奎斯特图(ω:0 → +∞)
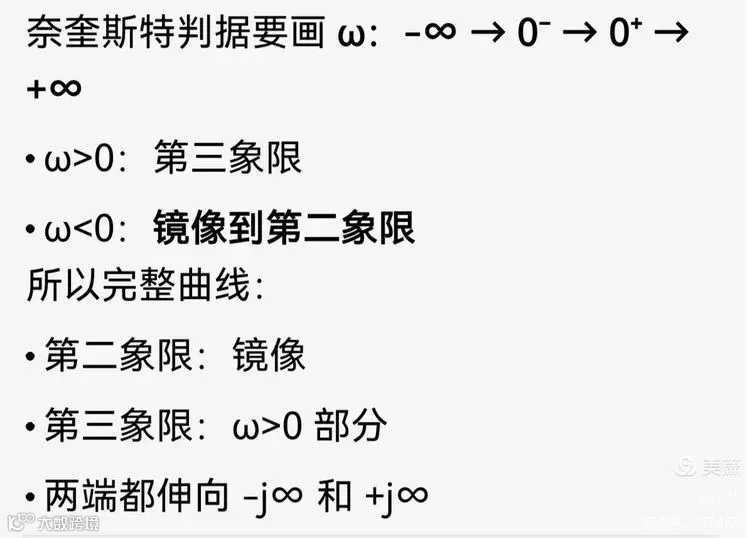
3) 完整奈奎斯特曲线
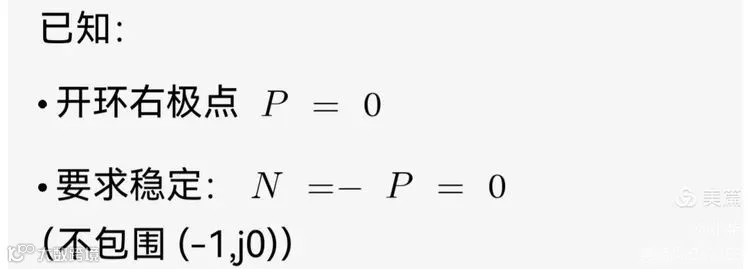
4) 奈奎斯特稳定判据
整条曲线在第二、三象限,补充一条ω从0+沿右侧无穷大圆弧到0−的辅助线,形成闭合曲线,
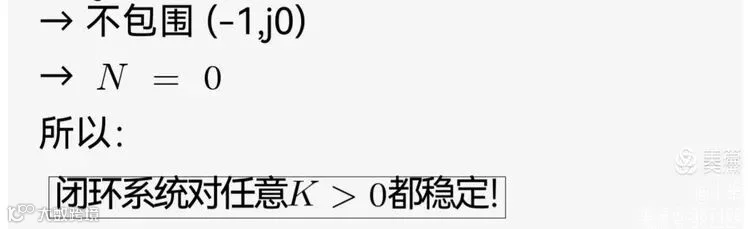
一句话总结:
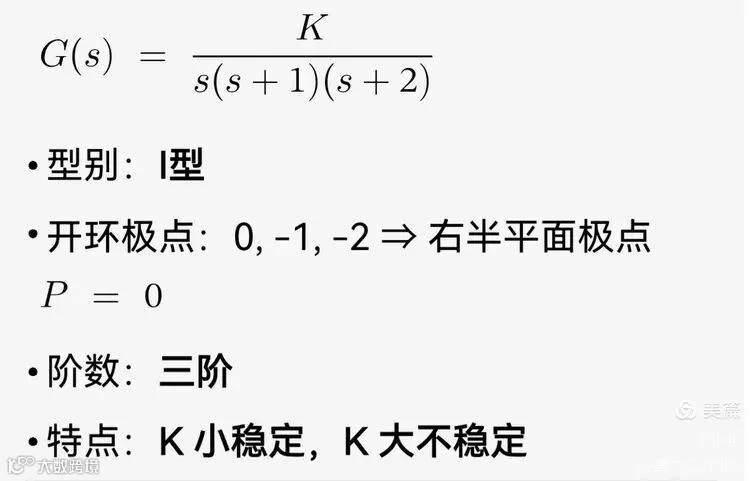
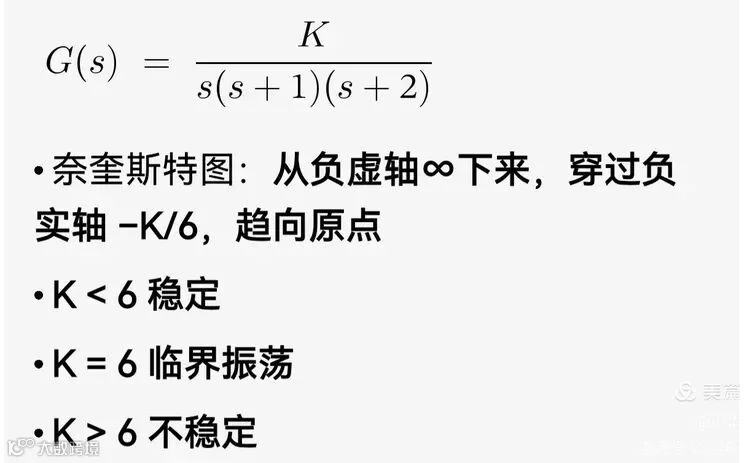
举题2: 画奈奎斯特图 + 找临界稳定 + 判稳定典型例题,传递函数如下
1) 系统信息
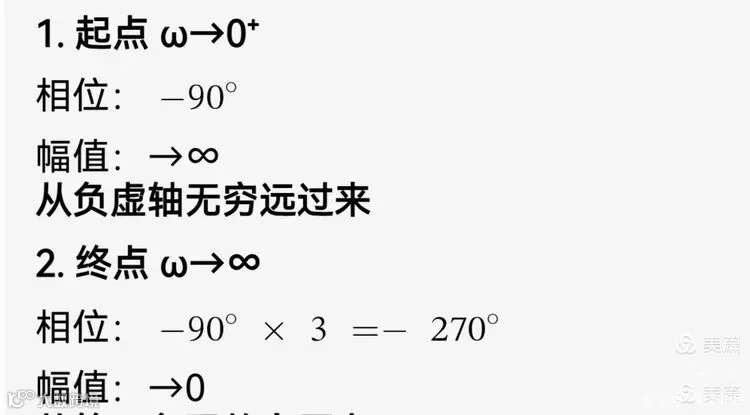
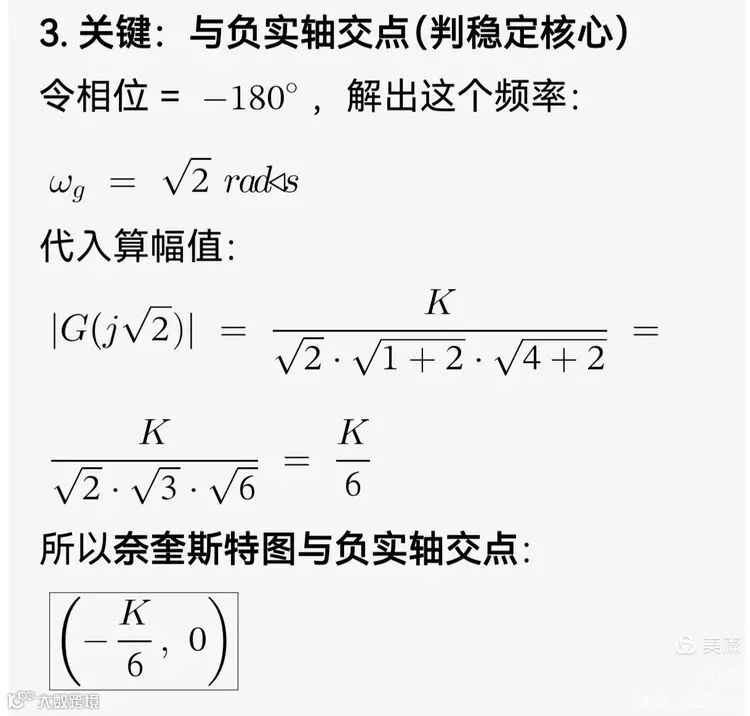
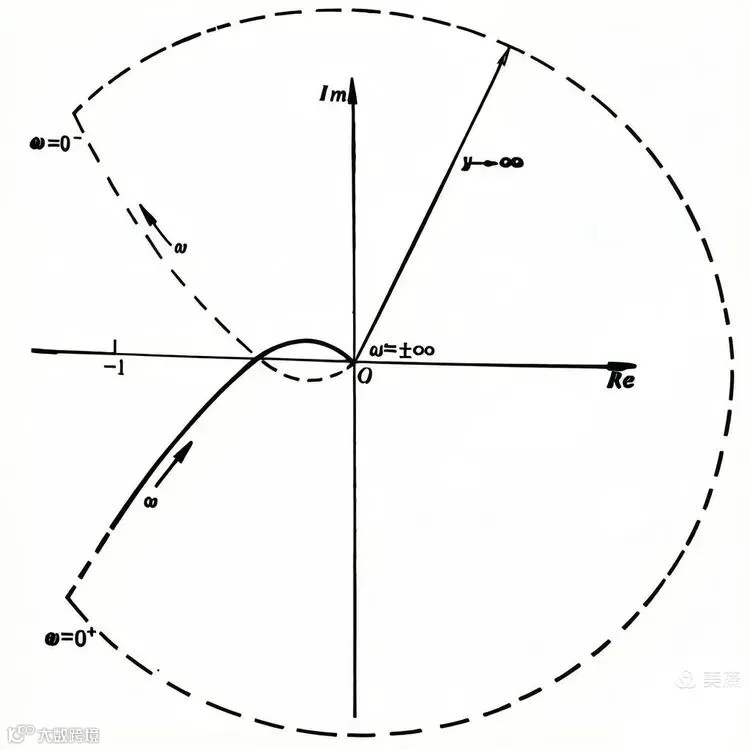
2) 画奈奎斯特图(ω:0→∞)
从负虚轴无穷远来,在(-K/6, 0)处穿过负实轴在第二象限趋向原点。与一条实轴对称镜像,及一条ω从0+沿右侧无穷大圆弧到0−的辅助线,形成闭合曲线,
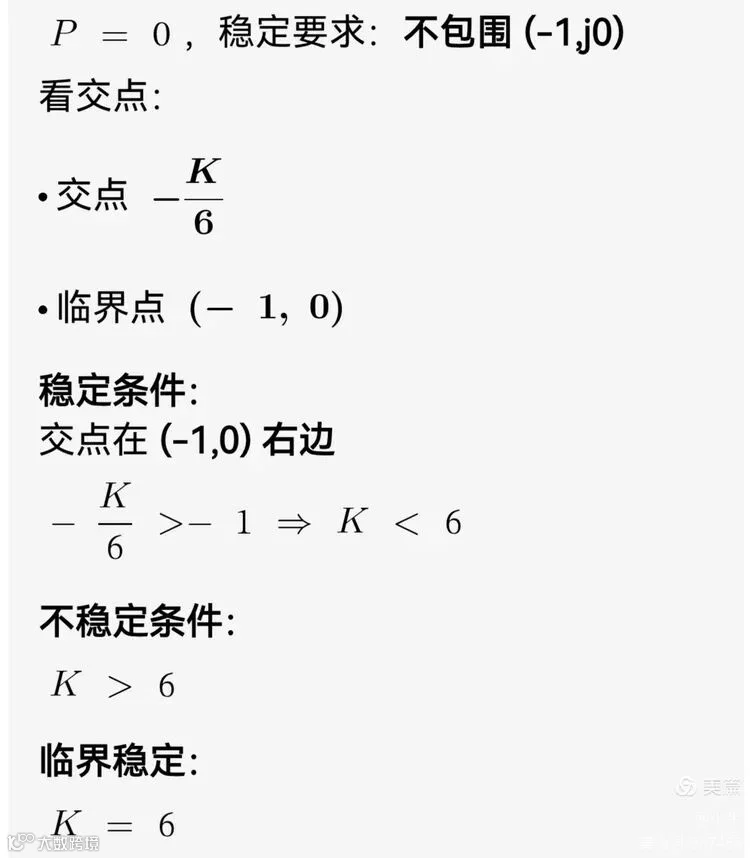
3) 奈奎斯特稳定判据
一句话总结
三. 优势与局限性
优势:
仅需开环频率特性即可判断闭环稳定性,无需计算闭环极点。
局限性:
仅适用于线性时不变系统,非线性系统需使用李雅普诺夫等方法。
图形分析对复杂系统可能不够直观,常需配合伯德图使用。