经典控制理论(18世纪末—20世纪60年代初)核心是单输入单输出(SISO)线性定常系统,以时域分析、频域分析、根轨迹分析为支柱,解决稳、准、快三大目标。
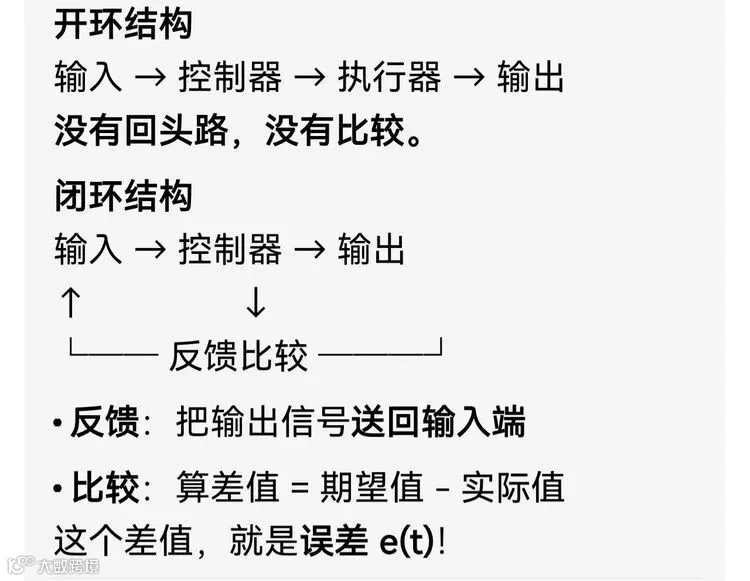
一、系统结构
二、时域分析法
时域分析是直接在时间域以时间为自变量,研究信号波形特征或动态系统在输入激励下,输出响应随时间演变的分析方法。核心用于评估系统的稳定性、动态性能、稳态精度,直观且可提供完整时间信息。
本质:求解系统微分/差分方程或状态方程,得到输出响应曲线,提取定量指标。
优势:直观、准确、实时性强,适合低阶线性定常系统与实时监控。
局限:对噪声敏感,高阶系统求解复杂,常与频域、根轨迹法互补。
典型场景:自动控制、信号处理、通信、电力、生物医学信号(如心电)分析。
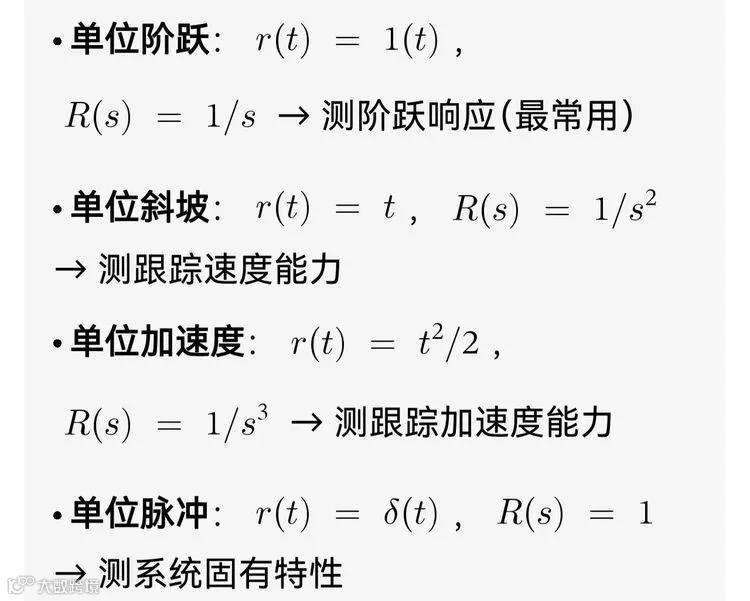
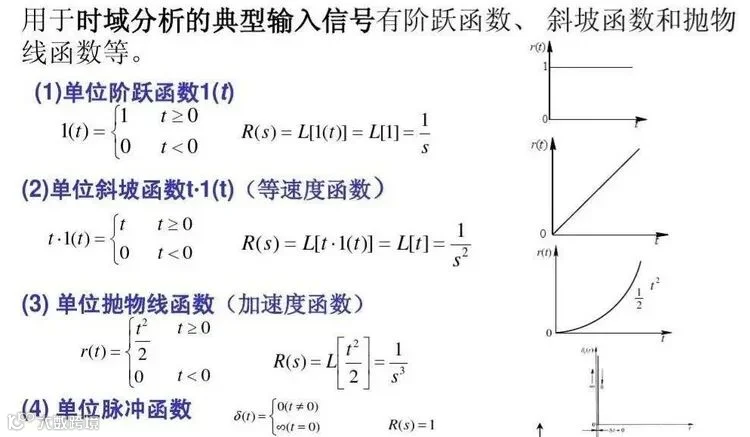
1. 数学模型与典型输入
数学模型:线性定常系统常用微分方程、传递函数或状态空间模型描述 。
2. 时域性能指标
时域性能指标是衡量系统在时间域内响应质量的关键参数,主要分为动态性能指标和稳态性能指标两大类。这些指标通常基于系统对单位阶跃输入信号的响应来评估,因为阶跃输入能最严峻地考验系统的稳定性、快速性和准确性。
单位阶跃输入下
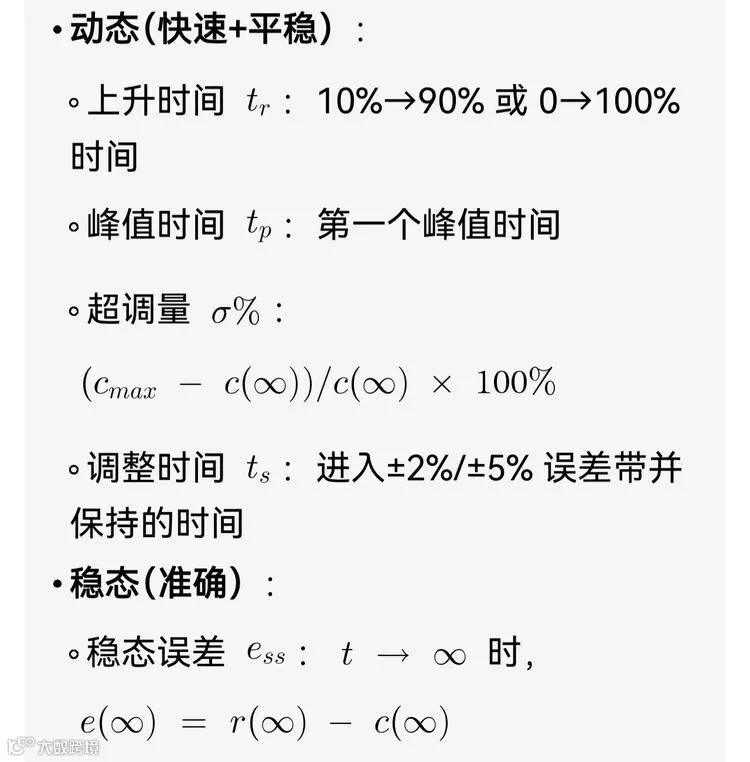
3. 动态性能指标(反映系统的快速性与平稳性)
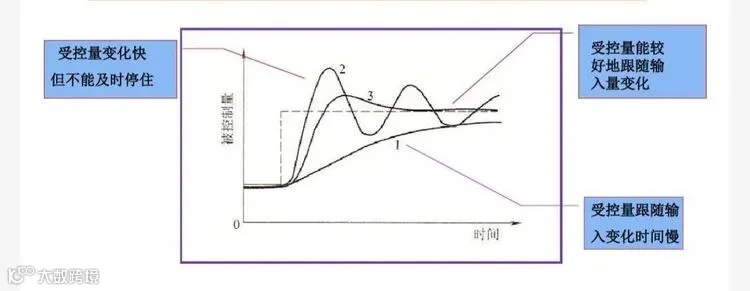
比较三个随动系统,当输入量变化时,系统的动态性能。
动态性能指标描述了系统从初始状态过渡到稳态过程中的表现,主要包括:
上升时间(Rise Time, ( tr )):系统响应从稳态值的10%上升到90%所需的时间。对于无振荡的系统,可定义为从0首次上升到稳态值所需的时间。上升时间越短,系统响应越快。
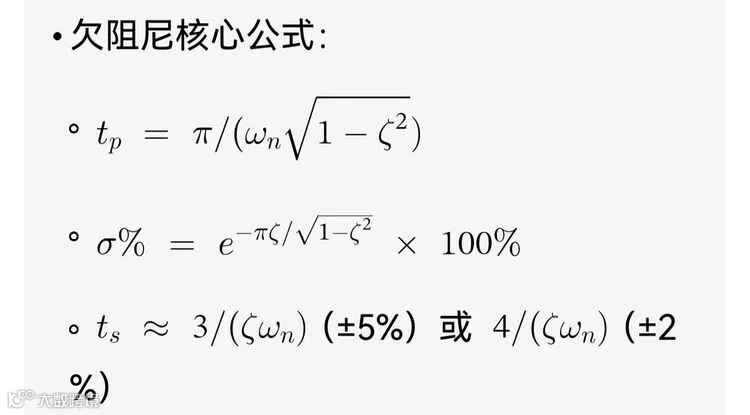
峰值时间(Peak Time, ( tp )):系统响应达到第一个峰值所需的时间。它反映了系统响应的迅速程度。
超调量(Overshoot, ( sigma% )):响应的最大峰值超出稳态值的百分比,计算公式为:
超调量越大,系统振荡越剧烈,平稳性越差。
4. 稳态性能指标(反映系统的准确性)
稳态性能指标描述了系统在时间趋于无穷时的最终输出与期望值之间的偏差。
调节时间(Settling Time, ( ts )):系统响应到达并保持在稳态值的±2%或±5%误差带内所需的最短时间。调节时间越短,系统过渡过程越快。工程上常采用±5%误差带,高精度系统可能采用±2%。
振荡次数(Number of Oscillations):在调节时间内,系统响应曲线穿越稳态值的次数的一半。它直接反映了系统的阻尼特性,振荡次数越多,系统越不稳定。
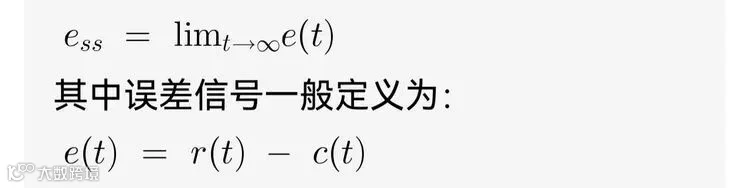
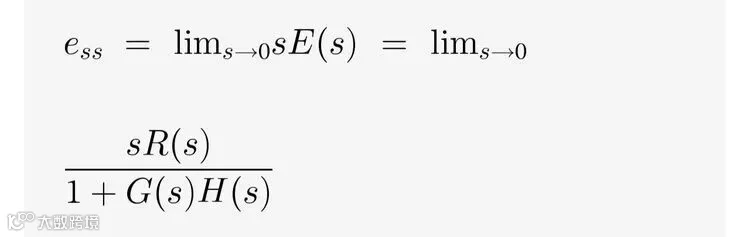
稳态误差(Steady-State Error, ( e_ss))是系统达到稳态后,期望输出与实际输出之间的差值。
三、系统时域分析
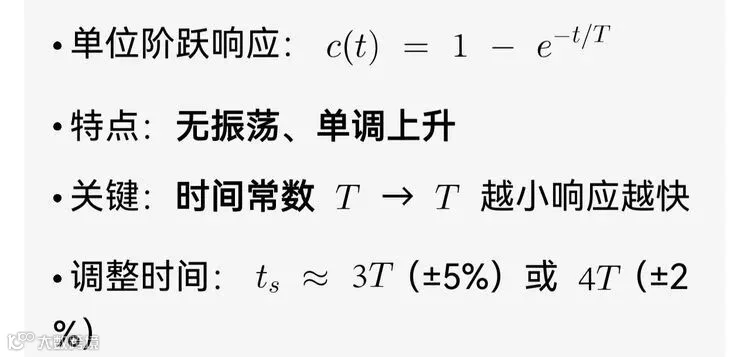
1. 一阶系统分析
一阶系统无振荡,因此无峰值时间和超调量。
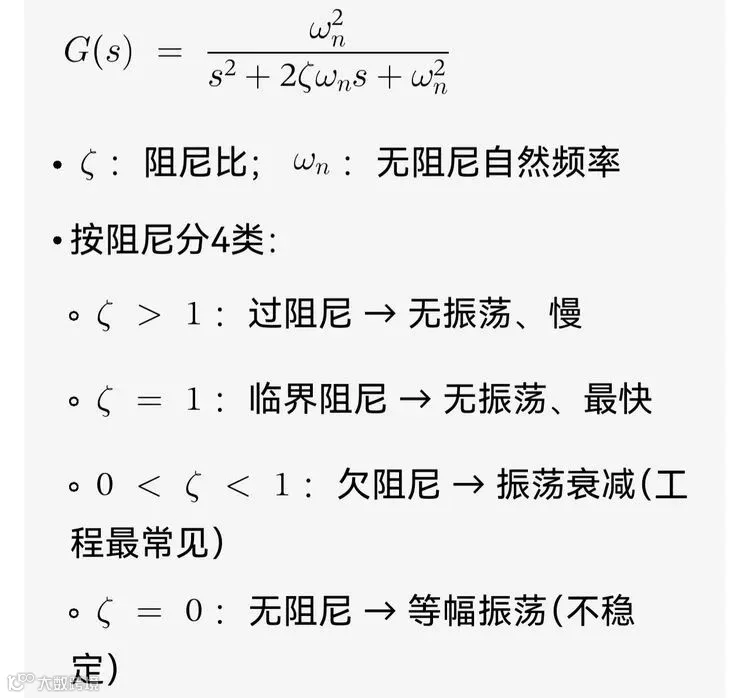
2. 二阶系统分析
欠阻尼二阶系统是分析动态性能的重点,动态性能指标均适用。
3. 稳定性分析(时域判据)
稳定充要条件:所有特征根实部<0(闭环极点在左半平面)。
劳斯-赫尔维茨判据:不用求根,直接由特征方程系数判断稳定性。
4. 稳态误差分析
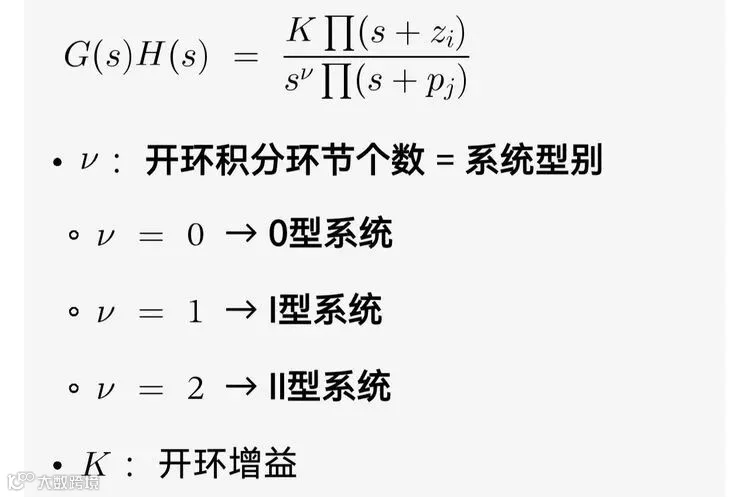
线性定常系统进入稳态后,输出量与期望输入量之间的持续偏差。它是衡量系统控制精度的核心指标,与系统类型(0型、I型、II型)、开环增益及输入信号形式(阶跃、斜坡、加速度)密切相关。
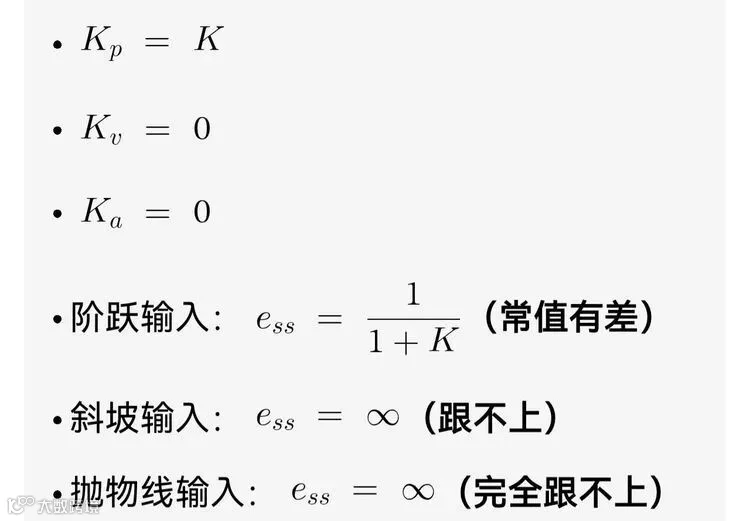
物理意义:0型系统只能跟踪阶跃,有静差;不能跟踪斜坡、抛物线。
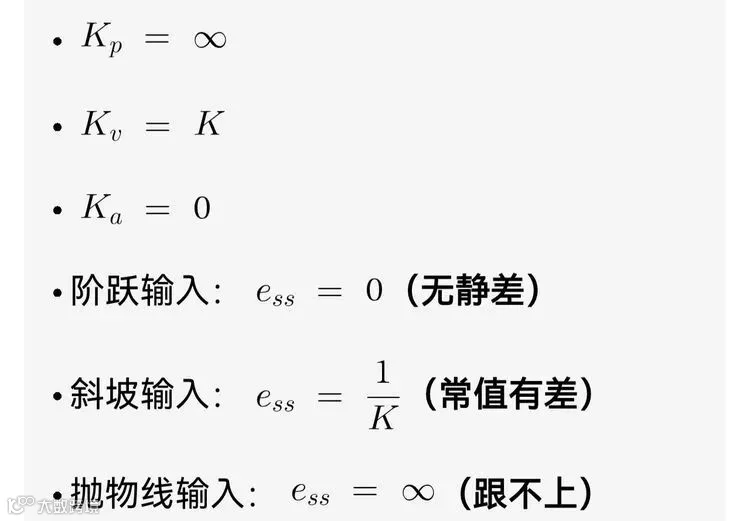
物理意义:Ⅰ型系统对阶跃无静差,对斜坡有静差,不能跟踪抛物线。
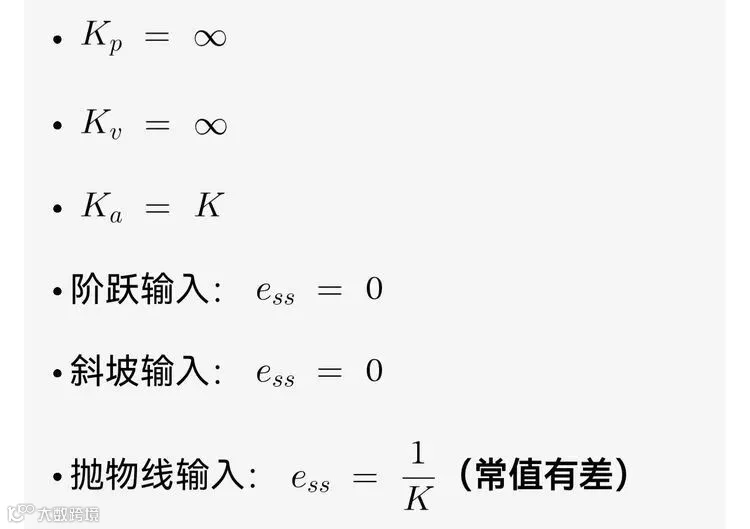
物理意义:Ⅱ型系统对阶跃、斜坡都无静差,只对抛物线有静差。
积分环节越多,跟踪能力越强,稳态误差越小,但稳定性越差。
常用结论:
四、时域法优缺点
时域分析是控制与信号处理的基础方法,核心是通过时间响应曲线量化系统的稳、快、准。工程中先用时域快速评估低阶系统,再结合频域/根轨迹法优化设计,配合仿真工具可高效完成分析与校正。
❌ 缺点:高阶系统求解繁琐,依赖计算机辅助(MATLAB)